MODELLING THE INTERACTION OF THRUSTERS WITH THE SOIL USING THE DISCRETE ELEMENT METHOD IN ROCKY DEM
MODELLING THE INTERACTION OF THRUSTERS WITH THE SOIL USING THE DISCRETE ELEMENT METHOD IN ROCKY DEM
Abstract
The article presents an analysis of modern models of interaction of machine engines with the soil. It also presents the results of the development of wheel-soil interaction model based on discrete element method in Rocky DEM software. The Hertz-Mindlin contact model was used to model wheel-soil interaction. When using the Hertz-Mindlin contact model, the main physical and mechanical parameters describing rheological behaviour of the simulated medium are Poisson's coefficient, coefficients of static and dynamic friction, Young's modulus, surface energy, diameter and shape of the simulated discrete elements. The obtained results can be used for power evaluation and optimization of structural and technological parameters of tractor and agricultural machinery engines. The proposed methodology makes it possible to increase the development of new propeller designs and to put them into production.
1. Введение
На современном этапе развития механизации сельскохозяйственного производства наиболее существенным резервом является повышение продуктивности полей за счет своевременного выполнения работ на базе высокопроизводительной техники и снижения воздействия их движителей на почву , , , .
Совершенствование движителей является основным способом снижения вредного воздействия их на почву, а также улучшения тягово-сцепных показателей. Вопросы взаимодействия движителей с почвой и обоснования рациональных параметров освещены в работах А.С. Антонова, Е.Д. Львова, Н.А. Забавникова, М.Г. Беккера, Дж. Вонга, М.И. Медведева, Е.М. Харитончика, В.В. Гуськова, А.В. Васильева, Е.Н. Докучаевой, О.Л. Уткин-Любовцова, М.И. Ляско, И.П. Ксеневича, В.А. Скотникова, Б.Н. Пинигина, Б.М. Куликова, Д.И. Золотаревской и многих других ученых.
Определение способов радикального снижения уплотнения почвы МТА возможно на основе углубленного изучения взаимодействия движителей с почвой, в результате которого можно разработать математические модели процессов и рекомендации для решения поставленных задач.
При теоретическом обосновании параметров движителей тракторов и сельскохозяйственной техники используются различные методы моделирования, которые можно классифицировать по методам численной реализации и применяемых компьютерных программ.
Целью работы является анализ моделей, используемых для моделирования взаимодействия движителей с почвой методом дискретных элементов и разработка методики моделирования взаимодействия колеса с почвой в программе Rocky DEM.
2. Методы и принципы исследования
Технический обзор литературы и информации по контактным моделям. Программа Rocky DEM для моделирования динамики сыпучих сред со сложной геометрией частиц методом дискретных элементов (DEM). Rocky DEM отличается аналогичных программных продуктов следующими функциями: несферические формы частиц, мульти-GPU вычисления, расчет разрушения частиц без потери массы или объема и визуализация поверхностного износа. В результате интеграции Rocky DEM и Ansys Workbench расчет и моделирование взаимодействия частиц можно выполнять с учетом аспектов механики деформируемого твердого тела, вычислительной гидрогазодинамики и теплообмена. Также при использовании Ansys Workbench можно выполнять многофазные эксперименты.
3. Результаты и обсуждение
В зависимости от методов численной реализации моделей взаимодействия движителей с почвой их можно подразделить на три основных вида: модели с использованием метода вычислительной гидродинамики (CFD-метод), модели с использованием метода конечных элементов (FEM-метод) и модели с использованием метода дискретных элементов (DEM-МДЭ) , , , .
В настоящее время перспективным для моделирования взаимодействия движителей с почвой является метод дискретных элементов. МДЭ – это численный метод, предназначенный для расчёта движения большого количества частиц, таких как молекулы, песчинки, гравий, галька и прочих гранулированных сред. Метод был первоначально применён Cundall в 1971 году для решения задач механики горных пород . В МДЭ используются модели гистерезисной линейной пружины, жидкого моста, контактной жесткости, скольжения, склеивания, демпфированные упругие модели, линейная (Cundall) контактная модель, контактна модель Герца-Миндлина и Дересевича и ее вариантов, а также различные сочетание данных моделей (табл.1) , , , .
В МДЭ дискретный материал образуется из отдельных N упругих частиц сферической формы радиусом Ri. Движение каждой i-го элемента (частицы) определяется координатами центра его тяжести xi и углом поворота θi вокруг центра тяжести как целого элемента .
Система уравнений движения для каждой частицы при МДЭ
где, t – время, с; mi – масса частицы, кг; Ii – момент инерции, кг·м2.
Вектор Fi определяются как сумма сил, действующих на контактах i-й и j-й частиц (включая силу тяжести):
Вектор Mi возникает как момент сил Fij относительно центра i-й частицы:
Поверхностные силы Fijсостоят из сил трения Ft,ij и отталкивания Fn,ij. Для их определения используются различные контактные модели соударения. Сила отталкивания возникает между частицами при условии δij > 0 (рис. 1) и направлена по нормали nij в направлении центра i-й частицы (рис. 2). Для ее определения выберем вязкоупругою модель соударения :
Fn,ije – упругая составляющая, Н; Fn,ijv – вязкая составляющая, Н.
Упругая часть силы в соответствии Дж. Герцу
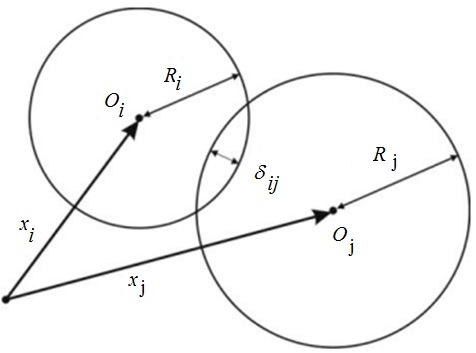
Рисунок 1 - Геометрия модели контактного взаимодействия частиц
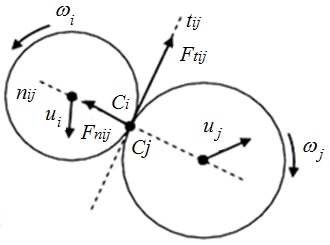
Рисунок 2 - Силы, действующие при контактном взаимодействии частиц
где Mij – приведенная масса частиц, кг; un,ij – проекция относительной скорости точки соударения на ось nij, м/с; γn – коэффициент демпфирования, оказывающий основное влияние на коэффициент восстановления скорости после удара .
Сила трения Ft,ijнаправлена против движения i-й частицы относительно j-й, а ее величина определяется:
где ut,ij – проекция скорости точки контакта Ci относительно скорости точки Cj на ось tij, м/с; φt – угол контактного трения между частицами, рад.
Следовательно, система дифференциальных уравнений второго порядка (1) относительно неизвестных xi, θj полностью определяет (3)-(7) движение и соударение совокупности моделируемых частиц.
На основе анализа существующих моделей контакта дискретных элементов, мы пришли к выводу, что для моделирования почвенной среды как вязко-упруго-пластического деформируемого тела наиболее подходящими являются модели контакта Герца-Миндлина: – модель и теория скользящего контакта Герца-Миндлина (без проскальзывания); – модель Герца-Миндлина с адгезией связывающих частиц; – модель когезионного контакта Герца-МиндлинаJKR (Johnson-Kendall-Roberts).
Модель когезионного контакта Герца-Миндлина JKR (Johnson-KendallRoberts) учитывает влияние сил Ван-дер-Ваальса в зоне контакта и позволяет моделировать прочно адгезивные системы (сухие или влажные материалы). В этой модели реализация нормальной упругой контактной силы основана на теории Джонсона-Кендалла-Робертса, изложенной в (Johnson, KendalandRoberts 1971).
Таблица 1 - Контактные модели метода дискретных элементов
где E* – эквивалентный модуль Юнга, Па; R* - эквивалентный радиус, м; δn – нормальное перекрытие, м; Ea, va, Ra и Eb, vb и Rb – модуль Юнга, Па; коэффициент Пуассона и радиус контактных сфер, м.
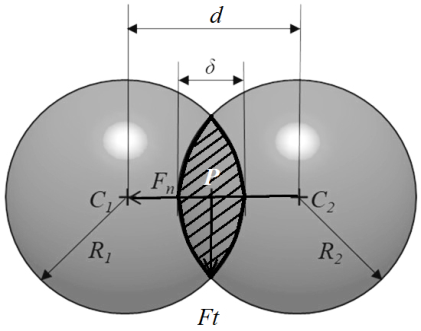
Рисунок 3 - Расчетная схема взаимодействия частиц по модели Герца-Миндлина JKR
где
где St – жесткость на сдвиг, Па; δt – тангенциальное перекрытие, м; G* – эквивалентный модуль сдвига, Па.
Нормальное перекрытие двух контактирующих частиц:
где
xA,i и xB,i – координаты центров A и B единиц частицы, соответственно, м; d – расстояние между центрами двух частиц, м.
Коэффициенты нормальной kn и тангенциальной ks жесткости двух контактирующих частиц определяются:
Контактная жесткость между двумя частицами моделируется как набор упругих пружин с постоянной нормалью и жесткостью на сдвиг в точке контакта. Параллельная связь заменяет сцепление между комками почвы.
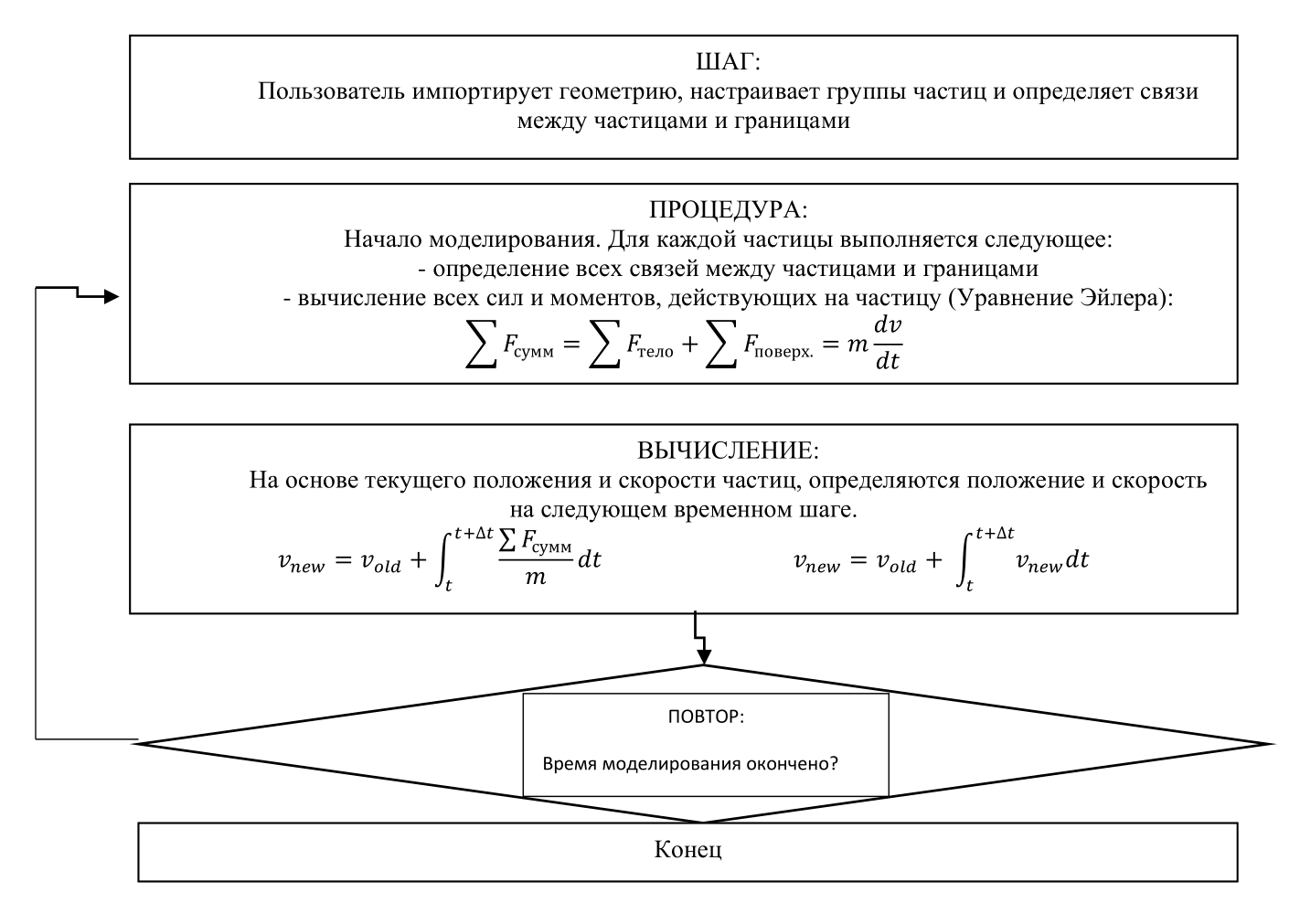
Рисунок 4 - Алгоритм численной реализации модели почвенной среды в программе Rocky DEM
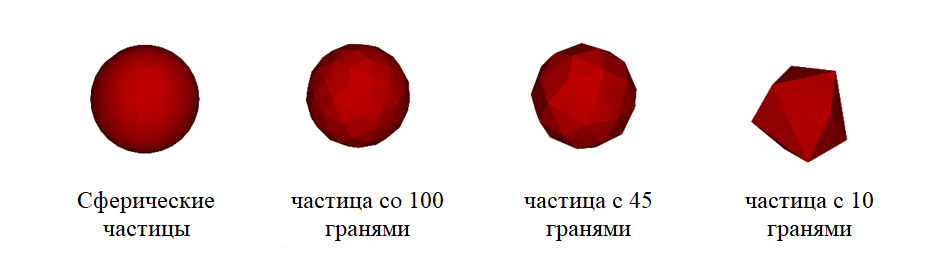
Рисунок 5 - Модельное представление форм частиц в программе Rocky DEM
Нами разработана модель взаимодействия колесных движителей с почвой на основе метода дискретных элементов.
Численная реализация разработанной модели почвенной среды производилась в лицензионной компьютерной программе Rocky DEM. Поэтапная реализация компьютерной модели включает в себя следующие шаги (рис. 6):
- проектирование трехмерных твердотельных моделей колеса тракторов и сельскохозяйственной техники и почвенного канала в системе проектирования КОМПАС 3D;
- импорт геометрий трехмерных твердотельных моделей, настройка группы частиц и определение связи между частицами и границами;
- процедура расчета при которой для каждой частицы определяются все связей между частицами и границами, вычисляются все силы и моменты, действующие на частицы;
- процесс вычисления при котором на основе текущего положения и скорости частицы, определяется скорость и положение на следующем временном шаге;
- окончание расчета и анализ полученных результатов.
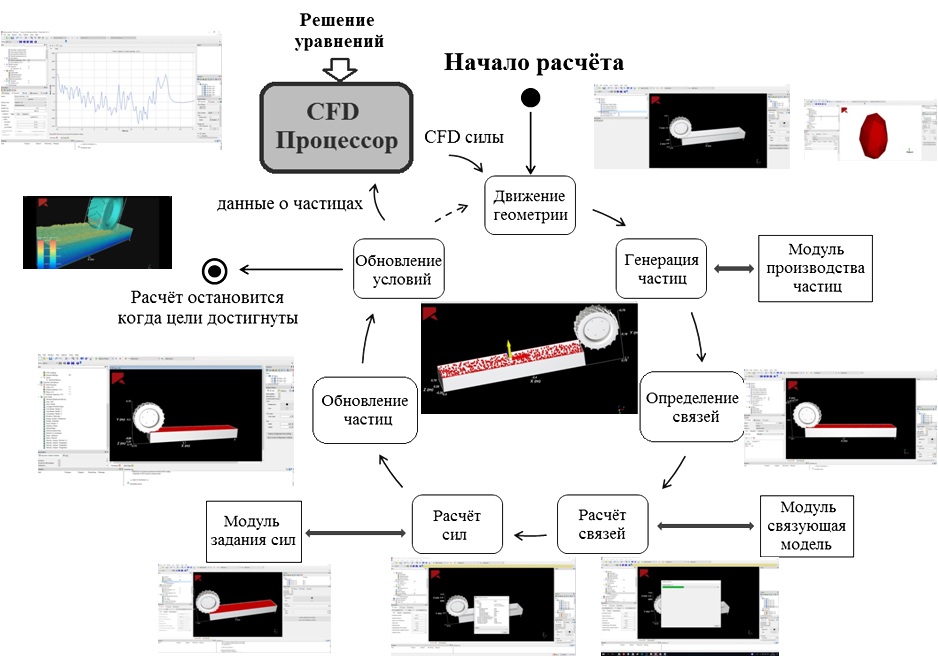
Рисунок 6 - Реализация модели взаимодействия колеса с почвой в программе Rocky DEM
Например, время расчета задачи при моделировании движения 1 миллиона сферических частиц по конвейерной линии на компьютере с 4-мя ядрами составляет примерно 11 часов, а для подобной задачи с несферическими частицами более 48 часов.
На рисунке 7 показаны результаты процесса взаимодействия шина-грунт, где наглядно видны процессы уплотнения почвы и образования колеи после прохода колеса, а также прилипание почвенных комков. Объектом исследований является колесо с шиной 23,1 R26 колесного трактора Т-150К, тип почвы – суглинок. В таблицах 2, 3 представлены параметры почвенной среды и основные параметры шины.
На рисунке 8 показан фрагмент графика изменения силы сопротивления качению колеса и в таблице 4 представлены результаты вычислений следующих показателей: силы сопротивления качению колеса, мощности потребляемой колесом и плотности почвы по центру колеи колеса на глубине 18 см.
Таблица 2 - Параметры почвенной среды
№ п/п | Показатели | значение |
1 | Модуль Юнга, Па | 1•106 |
2 | Коэффициент Пуассона | 0,3 |
3 | Коэффициент статического трения | 0,45 |
4 | Коэффициент динамического трения | 0,35 |
5 | Коэффициент реституции | 0,3 |
6 | Равновесная плотность почвы, кг/м3 | 1200 |
7 | Диаметр частиц, м | 0,03 |
Таблица 3 - Основные параметры шины
№ п/п | Показатели | значение |
1 | Модуль Юнга, Па | 3,5 • 106 |
2 | Коэффициент Пуассона | 0,48 |
3 | Коэффициент статического трения | 0,6 |
4 | Коэффициент динамического трения | 0,6 |
5 | Ширина, мм | 540 |
6 | Диаметр шины, мм | 1500 |
7 | Средняя высота грунтозацепов zг, мм | 50 |
8 | Средняя ширина грунтозацепов b, мм | 60 |
9 | Угол наклона грунтозацепа к продольной оси симметрии протектора, град | 40 |
10 | Шаг грунтозацепа, мм | 255 |
Расчеты численного моделирования показали, что сила сопротивления качению колеса при движении изменялась в интервале 2458,3…11408,05 Н, со средним значением 4408,36 Н. Мощность, потребляемая колесом, находился в пределах от 7758,64 до 18768,83 Вт со среднем значением 16176,69 Вт. Максимальное значение плотности почвы по следу на глубине 18 см увеличилось до 1502,7 кг/м3. Среднее значение плотности составило 1372 кг/м3, что привело к ее увеличению по следу колеса на 14% по сравнению с равновесной плотностью равной 1200 кг/м3.
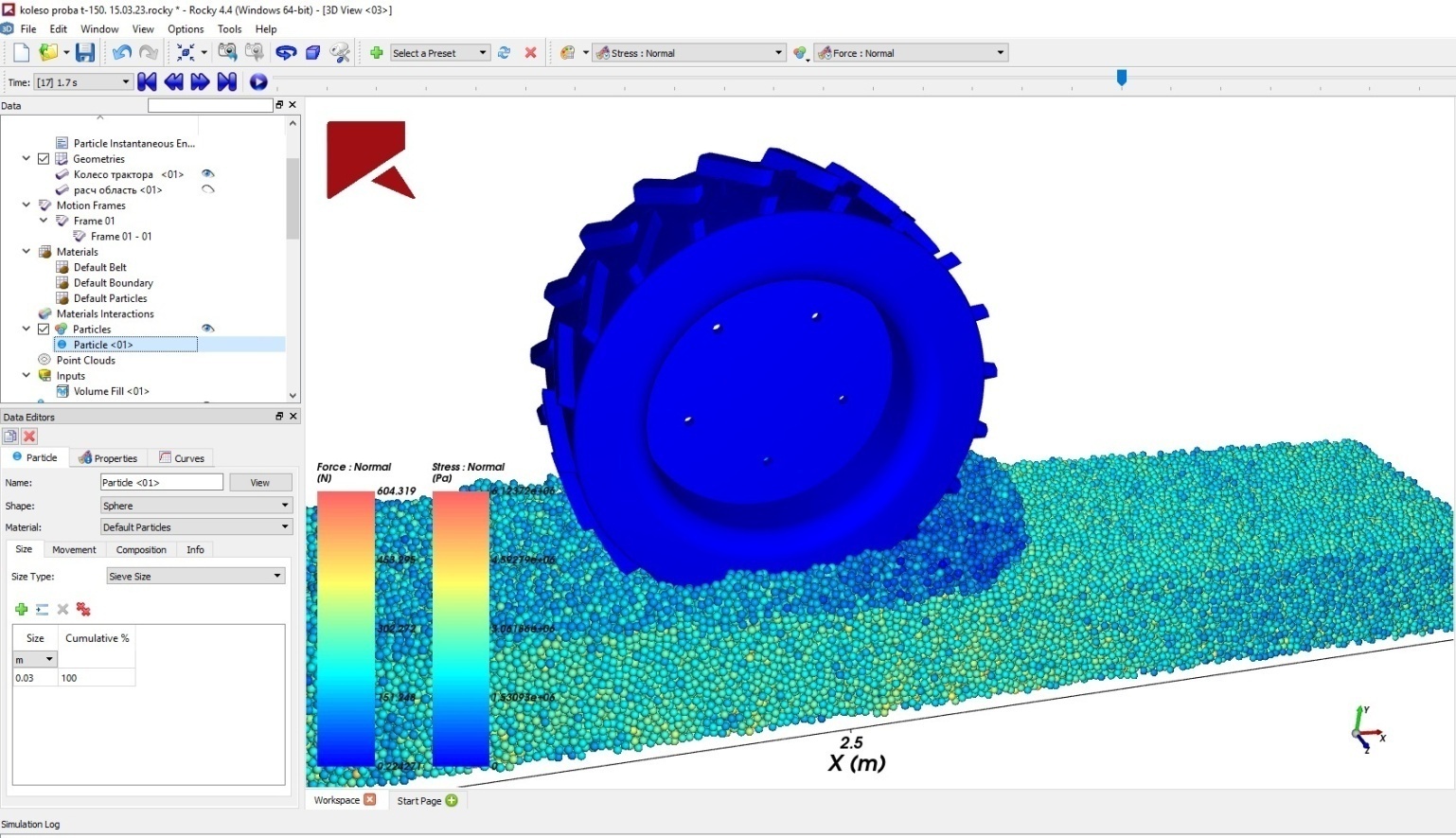
Рисунок 7 - Визуализация модели взаимодействия колеса с почвой
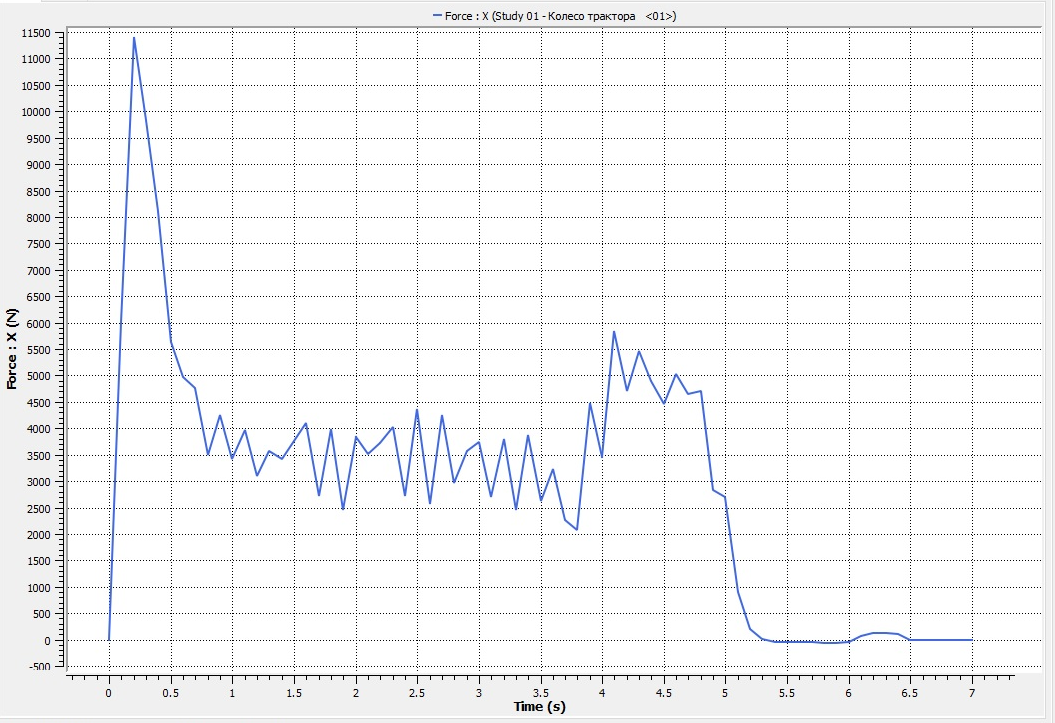
Рисунок 8 - Изменение силы сопротивления качению колеса
Таблица 4 - Результаты расчета основных показателей
№ п/п | Время, с | Сила сопротивлению качению колеса, Н | Мощность колеса, Вт | Плотность почвы, кг/м3 (на глубине 18 см) |
1 | 0 | 0 | 0 | 1368,34 |
2 | 0,1 | 6000,88 | 7758,64 | 1409,88 |
3 | 0,2 | 11408,05 | 12576,73 | 1389,11 |
4 | 0,3 | 9832,54 | 13716,76 | 1395,22 |
5 | 0,4 | 8113,58 | 13700,87 | 1412,32 |
6 | 0,5 | 5632,28 | 14187,69 | 1406,21 |
7 | 0,6 | 4976,78 | 14349,54 | 1407,43 |
8 | 0,7 | 4767,92 | 15096,13 | 1412,32 |
9 | 0,8 | 3497,44 | 15092,68 | 1412,32 |
10 | 0,9 | 4247,98 | 15326,45 | 1403,77 |
11 | 1 | 3425,05 | 15549,24 | 1409,88 |
12 | 1,1 | 3965,34 | 15632,02 | 1419,65 |
13 | 1,2 | 3100,70 | 16155,43 | 1422,09 |
14 | 1,3 | 3567,51 | 16087,41 | 1408,66 |
15 | 1,4 | 3417,82 | 16576,85 | 1412,32 |
16 | 1,5 | 3752,70 | 16787,90 | 1406,21 |
17 | 1,6 | 4107,30 | 17206,51 | 1411,1 |
18 | 1,7 | 2726,24 | 16905,98 | 1413,54 |
19 | 1,8 | 3993,31 | 17141,49 | 1413,54 |
10 | 1,9 | 2458,30 | 17145,23 | 1412,32 |
11 | 2 | 3833,36 | 17382,00 | 1406,21 |
12 | 2,1 | 3514,55 | 17762,99 | 1419,65 |
13 | 2,2 | 3720,97 | 17626,59 | 1442,86 |
14 | 2,3 | 4017,70 | 17936,52 | 1499,06 |
15 | 2,4 | 2714,99 | 17830,82 | 1502,73 |
16 | 2,5 | 4372,45 | 18250,89 | 1383,0 |
17 | 2,6 | 2570,32 | 18099,73 | 1270,6 |
18 | 2,7 | 4242,54 | 18167,96 | 1213,18 |
19 | 2,8 | 2969,24 | 18234,80 | 1111,77 |
20 | 2,9 | 3570,93 | 18246,09 | 1070,24 |
21 | 3,0 | 3732,09 | 18768,83 | 1062,91 |
Среднее | 4408,36 | 16176,69 | 1372,0 | |
4. Заключение
Таким образом, почвенные частицы обладают когезионными и адгезионными свойствами и почва является упруго-вязко-пластичной средой для моделирования взаимодействия движителей с почвой наиболее подходящим является модель контакта Герца-Миндлина.
Разработана модель взаимодействия колеса с почвой на основе метода дискретных элементов в программе Rocky DEM.
Полученные результаты можно использовать при энергетической и агротехнической оценке и оптимизации конструктивно-технологических параметров движителей тракторов и сельскохозяйственной техники. Предложенная методика позволяет повысить разработки новых конструкций движителей и постановки их на производство в предприятиях тракторного и сельскохозяйственного машиностроения.
В последующем модель почвенной среды на основе метода дискретных элементов должна учитывать неровности рельефа поля, анизотропность свойств почвы и динамический характер рабочих процессов и показывать процессы буксования и уплотнения.