AN EVALUATION OF LONGITUDINAL STABILITY OF THE QUANTUM CAR BASED ON AERODYNAMIC PARAMETERS OF THE ANALOGUE ONE
AN EVALUATION OF LONGITUDINAL STABILITY OF THE QUANTUM CAR BASED ON AERODYNAMIC PARAMETERS OF THE ANALOGUE ONE
Abstract
The aim of the calculation study was to evaluate the stability of longitudinal motion of a quantum car (a land vehicle with a quantum engine (QE)) on the basis of aerodynamic characteristics of a car-analogue. The methods include: examination of the force balance of the quantomobile, the balance of force moments and normal wheel reactions; accounting for the specifics of air forces; adaptation of the results of aerodynamic tests of the analogue car to the modelling of the car. In view of the above, a Simulink model of the ground motion of the quantum car was formed, which served as the basis for a simulation system of several subsystems, two of which – Vehicle Dynamics and NormReactions – are directly used to calculate the results of the study. Among the evaluation parameters are the values of longitudinal overturning moment, normal wheel reactions, and aerodynamic stability coefficient (ratio of aerodynamic pitching moment to total overturning moment). The results of the calculations, carried out with the involvement of data on the prototype car, cover the simulation of acceleration and cruising modes of the quantum car – both in the conditions of the aerodynamic bench and on-road conditions. Varying variables: aerodynamic influence coefficients, coordinates of the point of trust application to the crew body, rolling resistance coefficients of the supporting wheels. The results of the calculations allowed to evaluate the significance of longitudinal overturning and necessary crew stabilizing moments. Conclusions. The longitudinal unbalance of a quantum vehicle in motion is different from that of a car. To neutralize the overturning moments, additional vertical thrusters and other means of stabilization are required, covered by a single control system with the main QE. The formed S-model can serve both as a means of working out design schemes of quantum cars and as an operational solver of activation of stabilizing elements on board of a quantomobile. The novelty of the work can be considered essential, due to the lack of information about similar conceptual studies of a hypothetical quantum vehicle.
1. Введение
На базе идей извлечения энергии из физического вакуума (ФВ) , , , учеными рассматриваются концепции квантовых двигателей (КД), способных найти применение, в том числе, на транспорте , , , . И хотя получаемые импульсы траста (тяги) КД пока малы, надежда на масштабную реализацию названых идей становится все более существенной , , . Предположение, что физики задачу извлечения энергии ФВ решат успешно, а инженеры создадут работоспособные конструкции КД, вызывает необходимость рассмотрения особенностей использования траста КД для движения транспортного средства (ТС) , , , .
Основная особенность ТС с КД заключается в том, что КД по схеме воздействия на экипаж подобен реактивному двигателю (РД). Однако в отличие от РД (где траст создается как реакция на импульс отбрасываемой массы газов, получая эту массу в качестве опоры), КД создает траст за счет деформации поля ФВ, обеспечивая опору трасту во внешней части задействованного фрагмента поля , . Иллюстрация на рис. 1 , отображает схему деформации поля ФВ, обеспечивающего за счет градиента сил возникновение направленного траста.
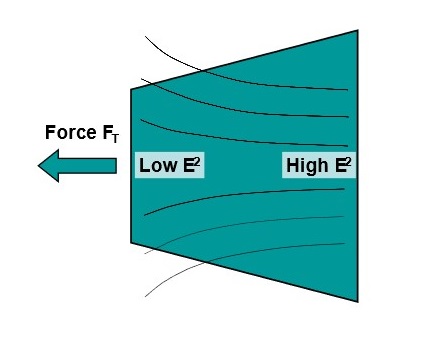
Рисунок 1 - Градиент плотности поля E2 в конусном резонаторе, приводящий к возникновению траста FT
При возможности переводить вектор траста в наклонное положение можно за счет вертикальной составляющей этого вектора осуществлять прижим экипажа к ОП, либо его вывешивание. Это также видоизменит схему сил и моментов традиционных наземных ТС .
Разница в величинах вертикальных нагрузок на опорные колеса экипажа, с точки зрения сохранения продольной устойчивости, для автомобиля в большинстве случаев имеет второстепенное значение – поскольку при движении автомобиля названые нагрузки отражаются встречными реакциями твердой ОП, что обеспечивает продольную устойчивость. В случае квантомобиля, однако, во-первых, из-за отсутствия ограничений по сцеплению колес с ОП возможна реализация тяговой силы, превосходящей допустимую для автомобиля. Во-вторых, траст, вывешенный над ОП, формирует составляющую опрокидывающего момента, отсутствующую в автомобильном варианте кинематической схемы. В-третьих, в отсутствие твердой опоры вывешенный (даже частично) квантомобиль получит склонность к вращательному движению в плоскости тангажа .
Вывешивание (лифт) может привести к реализации режимов летательного аппарата. Реализация прижимающей силы (антилифт) при движении ТС в воде может позволить даже реализацию режима подводной лодки. Это привело к идее всесредного мультимодального квантомобиля (ВМК) . Скоростные характеристики режимов ВМК в различных средах будут отличаться – и проблемным станет выбор конфигураций кузовов: универсальных, либо изменяемых, либо в комбинации. Находясь в русле концепции ВМК, ограничимся, однако, наземным ТС и влиянием аэродинамики на устойчивость его продольного движения по ОП – как базовой среды его функционирования и базирования.
В формирование суммарного опрокидывающего момента (питч-момента) вносят вклад три группы сил: сопротивления качению колес, силы инерции и силы аэродинамического воздействия , , . Сосредоточим внимание на последнем аспекте. В целом же гипотезой представляемого исследования можно считать утверждение: Уровень и характер питч-момента квантомобиля отличается от такового для автомобиля, может быть значительным и требует его оперативной нейтрализации (минимизации).
2. Методы и принципы исследования
2.1 Цель и задачи исследования
Обобщая изложенное, целью исследования поставили моделирование и оценку продольной устойчивости квантомобиля на базе материалов аэродинамических испытаний автомобиля-аналога.
Устранение трансмиссии, перенос движительных функций с опорных колес на КД, появление возможности осуществлять лифт и антилифт наземного ТС – всё это, в отсутствие теоретических основ движения квантомобиля и эмпирических данных, вызывает необходимость использовать подход с опорой на программное имитационное моделирование (ПИМ).
Задачами по достижению цели являются:
1) формирование математической модели (ММ) продольного движения квантомобиля (МПДК) под поставленную цель;
2) построение Simulink-модели функционирования наземного ТС с охватом имитации стендовых аэродинамических испытаний и дорожного движения, с отработкой интерфейса взаимодействия с моделью и вывода данных;
3) на базе Simulink-модели проведение ПИМ, покрывающего некоторое множество вариантов испытаний наземного ТС – с целью формирования методики привлечения существующих материалов испытаний автомобилей-аналогов для прогнозирования устойчивости квантомобилей;
4) обсуждение и обобщение результатов расчетов с получением оценок продольной устойчивости квантомобиля;
5) формирование рекомендаций и выводов.
2.2 Вектор траста и особенности его использования в МПДК
В рамках продольного движения экипажа в плоскости развёртывания угла тангажа β вектор траста FT раскладывается на две ортогональные компоненты FTx и FTz :
Угол наклона вектора FT
При этом угловой диапазон обметания вектора траста составляет в общем случае от 0° до 360° (квадранты I и IV – тяга вперед, квадранты II и III – тяга назад, при этом квадранты I и II – лифт, квадранты III и IV – антилифт). Ограничимся приземным (без отлета) движением квантомобиля (0 ≤ FTz ≤ Gq, где Gq – вес экипажа) по горизонтальной ОП. Также, приняв вертикальные перемещения ТС при наземном движении несущественными (в сравнении с его горизонтальными перемещениями), освободимся от учета динамики вертикальных перемещений ТС.
2.3 Силовой баланс квантомобиля
В качестве основы модели движения экипажа по горизонтальной ОП выбран следующий вариант уравнения силового баланса квантомобиля :
где FTx – продольная сила тяги КД (траст), Н;
Fr – сила сопротивления качению опорных колес, Н;
Fwx – сила сопротивления воздуха продольному движению (drag), Н;
Fa – сила инерции, противодействующая ускорению экипажа, Н;
Gq' – сила давления экипажа на ОП с учетом лифта/антилифта, Н;
fk0 – коэффициент сопротивления качению колес при нулевой скорости;
fkv – скоростной коэффициент сопротивления качению колес, с2/м2;
Vq – текущая скорость продольного движения экипажа, м/с;
cd – коэффициент аэродинамического сопротивления, безразмерный;
ρw – плотность воздуха, Н ×с2/м4;
Sfront – лобовая площадь экипажа, м2;
Gq – исходный вес (сила тяжести) экипажа, Н;
g – ускорение свободного падения, м/с2;
a – продольное ускорение экипажа, м/с2;
δwh – коэффициент инерции вращения опорных колес экипажа.
Детализируем величину Gq', а именно:
где Fwz – аэродинамическая подъемная сила, Н. Для квантомобиля приведенная масса m’ = Gq(1+δwh)/g учитывает только вращение опорных колес, поскольку вращающиеся детали силового привода отсутствуют.
Отметим, что
Также отметим, что при представлении выражений программного алгоритма (представляемого на Simulink-схемах) используется нотация Simulink (прямая латиница, без индексов). например:
График прикладываемых к экипажу сил отображен на рис. 2. Обозначены: Vq – скорость движения экипажа; V∞ – скорость невозмущенного воздушного потока относительно экипажа , , , ; Cg – центр тяжести (ЦТ) экипажа; Gq – сила тяжести экипажа; Fa – приведенная сила инерции экипажа; CFT – точка приложения траста КД к корпусу экипажа; FT, FTx и FTz – сила тяги КД (траст) и ее покоординатные компоненты; Cw – центр давления (ЦД) аэродинамических сил , , ; Fw, Fwx и Fwz – сила воздействия воздуха и/или ее покоординатные компоненты; Ff1 и Ff2 – силы сопротивления качению передних и задних колес, соответственно; Tf1 и Tf2 – моменты сопротивления качению колес; hFwx, hFTx, hg – расстояния векторов соответствующих сил Fwx, FTx, Fa от ОП; lFwz, lFTz – расстояния векторов соответствующих сил Fwz, FTz до вертикали от оси задних колес; l0 – расстояние вектора силы Fwz до вертикали центра колесной базы; Lwb, L1 и L2 – расстояния базовое и от осей колес до проекции ЦТ на ОП; A и B – центральные точки пятен контакта колес с ОП; Rz1 и Rz2 – нормальные реакции ОП.
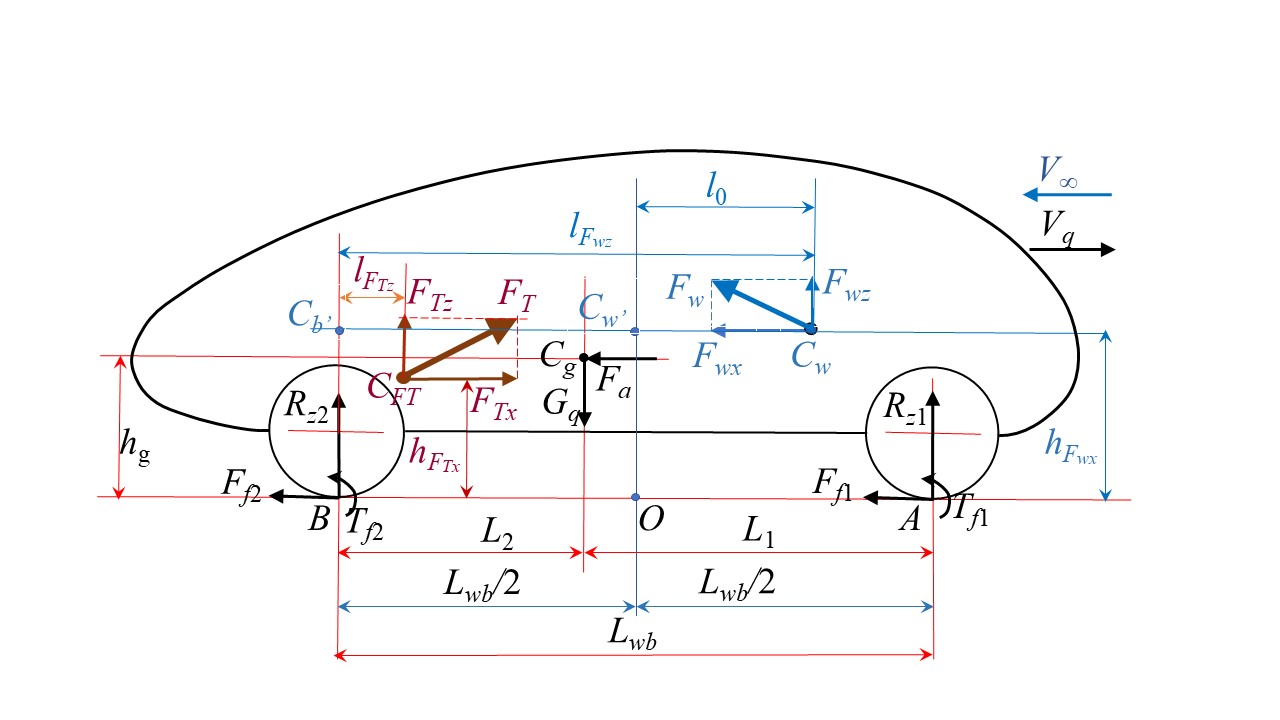
Рисунок 2 - Схема сил, действующих на квантомобиль
Формирование опрокидывающих моментов квантомобиля разберем с помощью рис. 2. Из характерных точек, используемых обычно при анализе баланса моментов – ЦТ (Cg) или точки контакта колес с ОП (A либо B) – выбираем точку контакта с ОП задних колес , , (в сравнении с ЦТ она обладает преимуществом – постоянством расположения). В точке B размещаем начало связанной системы координат (ССК): ось x по направлению к передку экипажа, ось z вверх; положительные питч-моменты – здесь против часовой стрелки.
Сумма моментов относительно точки B :
Учтем, что ,
где rд – динамический радиус колеса.
Коэффициент сопротивления качению
Реактивный момент, возникающий в движении от действия нормальной реакции ОП на колеса передней оси (относительно точки B)
не является искомым питч-моментом, поскольку опрокидывающее воздействие производит момент MΣpm=Lwb·(Rz1–Rz2)/2. И требуемый (requested) стабилизирующий момент (ТСМ) тогда равен Mz1req = –MΣpm.
Для оценки значимости аэродинамического момента MFw = MFwx+MFwz относительно ТСМ Mz1req ввели коэффициент
2.5 Адаптация МПДК к форме представления результатов испытаний автомобилей
Необходимым явился учет в МПДК формы представления результатов аэродинамических испытаний автомобилей, отображенной ниже.
Фронтальное сопротивление (драг) представляется выражением , ,
где Q – скоростной динамический напор;
воздействие силы лифта на экипаж , , :
аэро-питч-момент , , :
где cd, cl и cm – коэффициенты драга, лифта и аэро-питч-момента, получаемые по результатам испытаний объектов в аэродинамической трубе (в данном исследовании считаем их постоянными во всем диапазоне скоростей).
Замысел состоял в том, чтобы в МПДК использовать данные по этим коэффициентам, зафиксированные для автомобилей в стендовых условиях.
На высоте hFwx (см. рис. 2) существует ЦД Cw сил Fwz и Fwx – на расстоянии lFwz от вертикальной плоскости задней оси и расстоянии lO от вертикальной плоскости центра колесной базы.
По теореме Пуансо можно перенести силу Fwz в точку Cw' на вертикальной плоскости центра колесной базы (это будет сила Fl=Fwz), с возникающим при переносе моментом сил MFl .
Выявим связь координаты ЦД по горизонтали с результатами испытаний модели ТС в аэродинамической трубе следующим образом. Убедимся в возможности разложения на две составляющие коэффициента cm = cmd+cml:
,
где MFd – момент драга Fd относительно ОП, MFl – момент смещения силы лифта Fl с появлением плеча lO.
Теперь можем записать:
Отсюда получим:
Далее, перемещение тем же способом силы Fwz из точки Cw' в точку Cb' добавит момент приводя к сумме:
После сокращения получаем .
Откуда горизонтальная координата ЦД в ССК:
Рассмотренные на базе теоремы Пуансо особенности горизонтального смещения силы лифта Fl (Fwz) верны и для других вертикальных сил схемы рис. 2: Gq и FTz. И поскольку аэро-питч-момент в стендовых условиях определяется с опорой на колесную базу Lwb с центром в точке O, то и моменты других вертикальных сил должны рассчитываться с плечами относительно точки O, а именно, . Этим из общего баланса моментов сил (6) вычленяется совокупность воздействий, образующих только опрокидывающий момент MΣpm.
2.6 Влияние высоты действия траста КД на питч-момент
В практике испытаний моделей автомобилей в аэродинамической трубе опорные элементы модели крепят к опорному столу , , , . Схема баланса сил отображена на рис. 3а. Места крепления соответствуют точкам приложения тяговых сил Rxw1 и Rxw2 в пятнах контакта колес с ОП в условиях дорожного движения. Для квантомобиля, однако, траст FTx вывешен над ОП на высоте hFTx (см. рис. 3б) – что требует воплощения некоего вычислительного перехода. Рассмотрим это с помощью рис. 3.
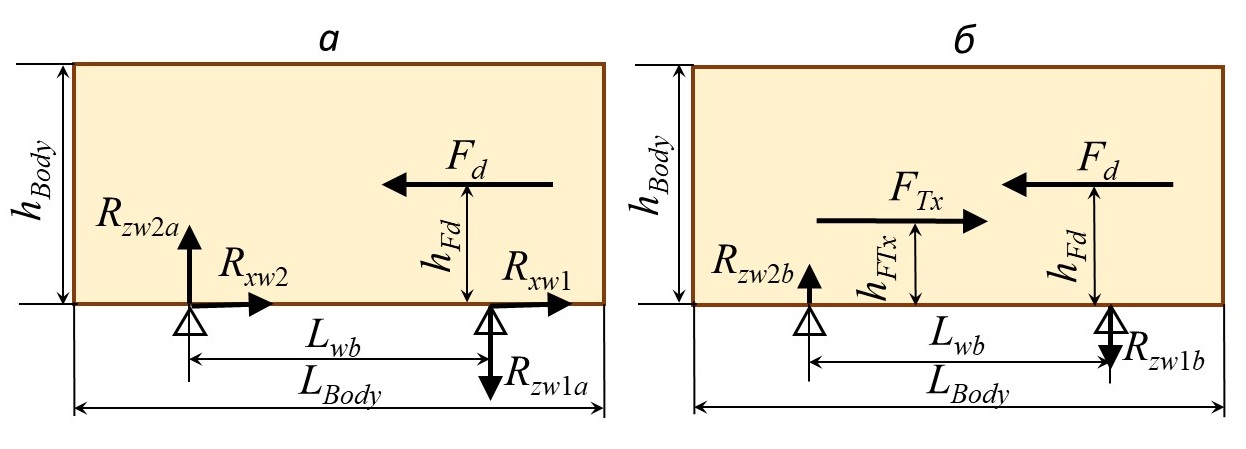
Рисунок 3 - Схемы баланса сил, действующих на тело:
а) – закрепленное в аэродинамической трубе к ОП стола; б) – с имитацией траста FTx, действующего над ОП
Для перехода ко второй ситуации (по рис. 3б) необходим учет изменения питч-момента из-за вывешивания силы FTx над ОП на высоту hFTx. Тогда результирующий аэро-питч-момент:
2.7 Simulink-модель приземного движения квантомобиля (МПДК)
Рассмотренный аналитический материал привлечен для формирования имитационной системы МПДК, две подсистемы которой – Vehicle Dynamics (рис. 4) и NormReactions (рис. 5) – усовершенствованы (относительно ) и используются для проведения представляемого исследования.
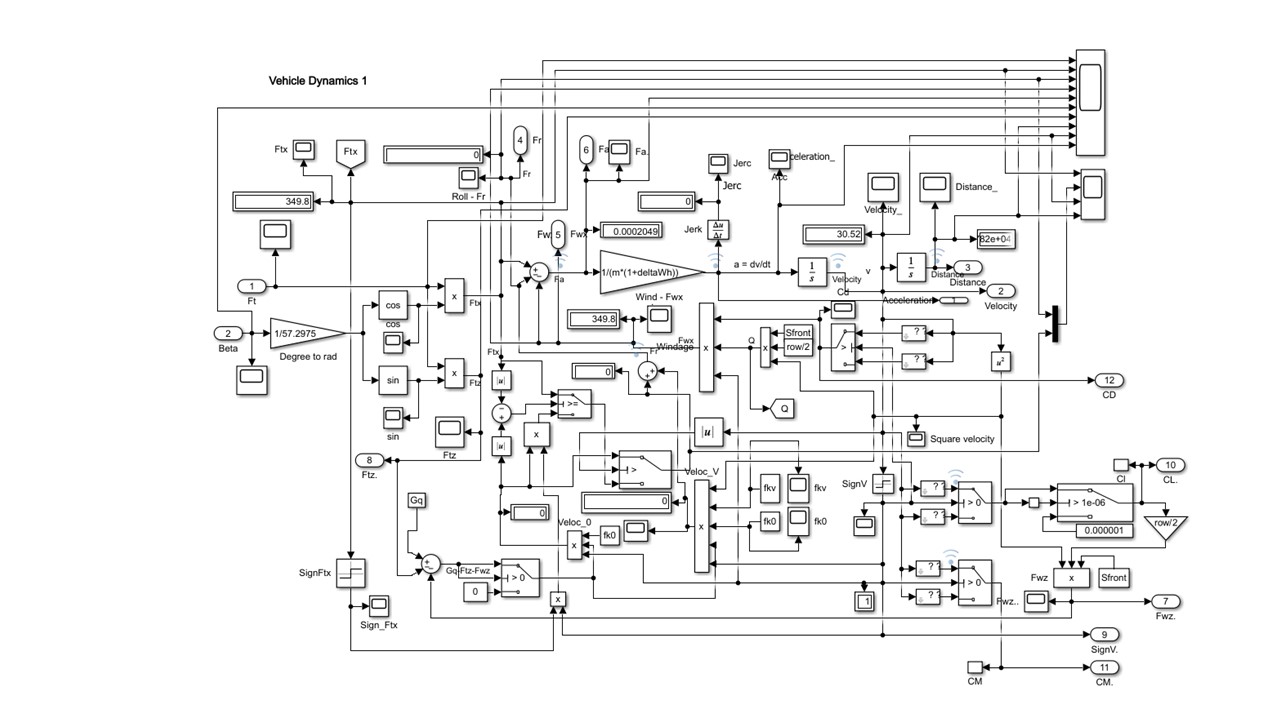
Рисунок 4 - Подсистема Vehicle Dynamics расчета показателей движения
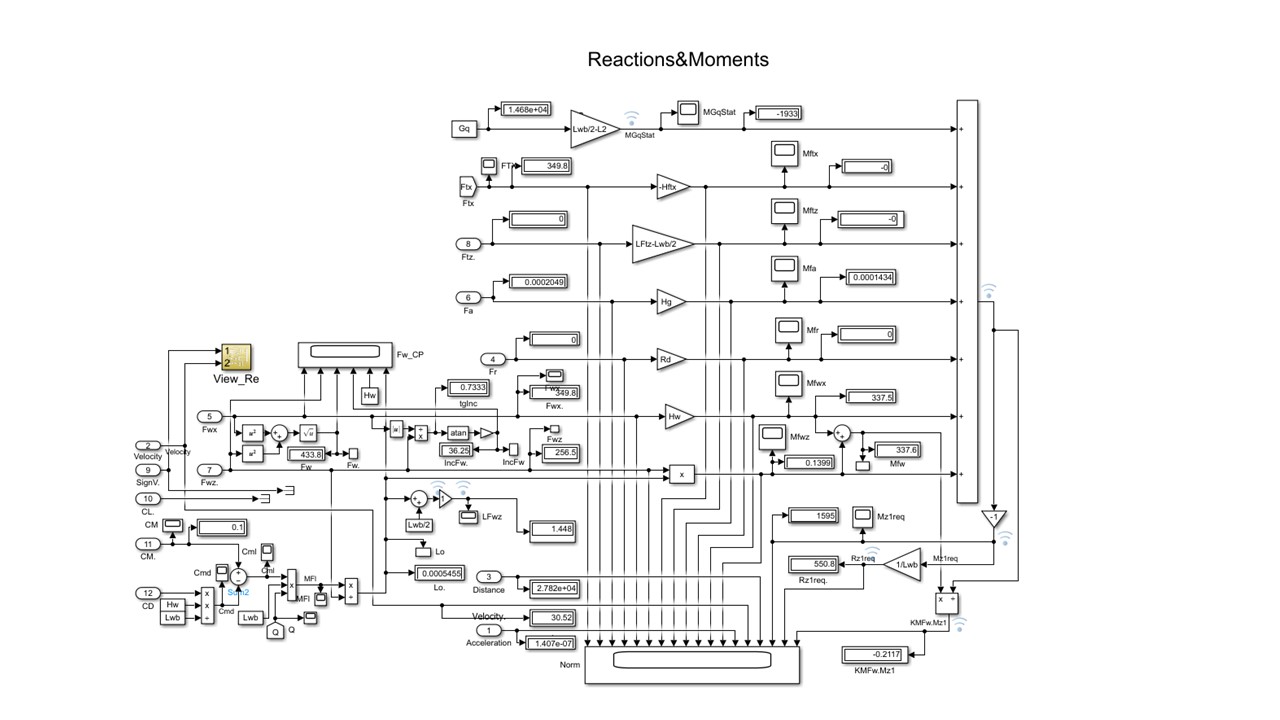
Рисунок 5 - Подсистема NormReactions расчета силовых моментов
Примечание: зафиксировано состояние при моделировании обдува на стенде ТС Баруха: V∞ = 30,5 м/с; Ftx =349?8 H; HFtx = 0 м
Верификация программы МПДК под вариант моделирования стендовых испытаний состояла в реинжиниринге в среде ПИМ состояния автомобиля, закрепленного на столе стенда (с отключенным блоком качения колес: fk0=0, fkv=0). При этом задавали высоту траста КД hFTx = 0 (нереальная высота для КД квантомобиля, но вариант представления тяговой силы, реализуемой ведущими колесами автомобиля в точках контакта с ОП). Задавали зафиксированные в натурном эксперименте значения коэффициентов cd, cl, cm. Далее, подобрав соответствующую силу тяги FTx, выполняли разгон виртуальной модели, заканчивающийся установившимся движением на скорости V∞ обдува натурной модели в трубе. Оценивали сходимость и невязки натурных и виртуальных экспериментов.
В качестве иллюстрации методики приведем действия на базе примера из классической работы Баруха – см. рис. 6.
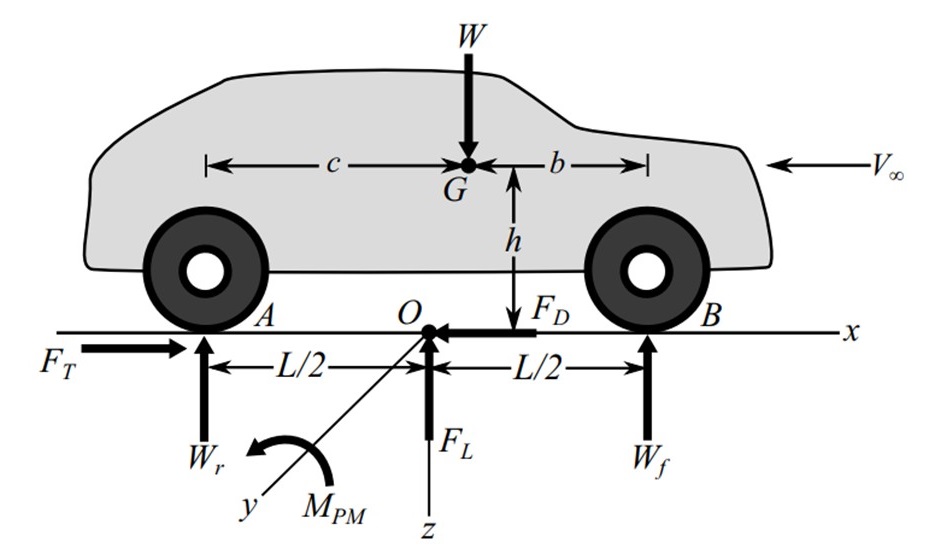
Рисунок 6 - Схема сил и моментов, действующих на автомобиль, закрепленный к столу аэродинамической трубы
Таблица 1 - Результаты измерений Баруха на аэродинамическом стенде
Скорость потока V∞ | Wf | Wr | FT | ||||
ft/s | м/с | lb | Н | lb | Н | lb | Н |
0 | 0 | 1800 | 8006 | 1500 | 6672 | 0 | 0 |
100 | 30,48 | 1745 | 7761 | 1498 | 6661 | 78,65 | 349,8 |
Разность показателей | - | -245 | - | -11 | - | 349,8 | |
Скоростной напор для скорости V = 30,48 м/с; Q = (ρ/2)SfrontV2 = 0,6125·2,044·30,482 = 1163 Н. Оценка cd = FT/Q = 349,8/1163 = 0,3. Oценка cl = Fl/Q = (245+11)/1163 = 0,22. Оценка питч-момента для скорости V = 30,48 м/с по формуле Баруха Тогда cm = Mpm/(Q·Lwb) = 339/(1163·2,8956) = 0,1.
Далее, в МПДК ввели в исходных данных cd = 0,3, cl = 0,22, cm = 0,1. Вычислили hFd = cm·Lwb /cd = 0,1·2,8956 / 0,3 = 0,9652 м. Реализовали имитацию разгона модели ТС (иначе – воздушного потока) c трастом FTx = 349,8 H (иначе – драга FD) до установившегося движения (соблюдая условие: fk0 = 0, fkv = 0).
Результаты имитации можно видеть на распечатке конечного состояния подсистемы Reactions&Moments в режиме виртуального установившегося движения ТС Баруха (точнее, потока воздуха относительно закрепленного экипажа) – рис. 5. На рис. 7 представлены графики виртуального разгона (точнее – потока воздуха) ТС Баруха и квантомобиля.
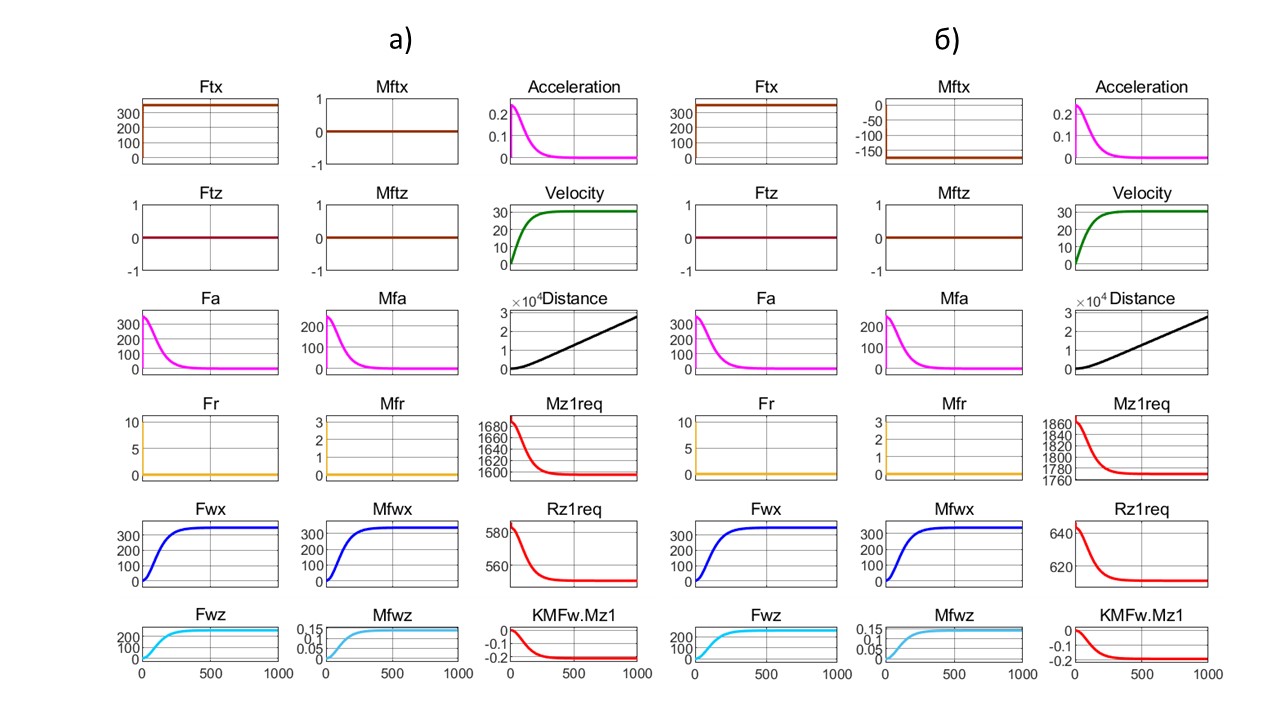
Рисунок 7 - Графики виртуального разгона ТС под условия стенда с конечной установившейся скоростью обдува V∞ = 30,5 м/с (сd = 0,3; сl = 0,22; сm = 0,1; fk0 = 0, fkv = 0):
а) автомобиль – HFtx = 0 м; б) квантомобиль – HFtx = 0,5 м
Таблица 2 - Сравнение результатов стендовых испытаний Баруха и реинжиниринга посредством МПДК
Вариант исследо-вания | Показатели | ||||||||
Скорость V, м/с | LFlO (lO), м | LFwz, м | Fwx, Н | MFwx, Нм | Fwz, Н | MFwz, Нм | Rz1req, Н | Mz1req, Нм | |
Стенд | 30,48 | 0 | 1,4478 | 349,8 | 336,9 | 256 | 370,6 | -244,2 | -707,4 |
МПДК | 30,52 | 0 | 1,448 | 349,8 | 337,5 | 256,5 | 371,5 | -244,5 | -709 |
3. Результаты программного имитационного моделирования
С целью количественной оценки динамики и продольной устойчивости квантомобиля посредством МПДК провели расчеты разгонов с выходом на установившийся режим. Опорными выбрали значения траста: для рамочного исследования аэродинамики (имитации условий стенда с отсутствием качения колес) – FT = 349,8 Н; для исследования динамики и устойчивости движения в дорожных условиях – FT = 1500 Н. Базовые данные автомобиля-прототипа и среды: Gq = 14680 Н; Lwb = 2,8956 м; Sfront = 2,044 м2; δwh = 0,04; fk0 = 0,02; fkv = 0,00037 с2/м2; ρw = 1,225 Н×с2/м4. Базовыми значениями параметров квантомобиля (однако варьируемых попеременно в той или иной серии расчетов), явились следующие: Hftx = 0,5 м; Lftz = 0,05 м; ; β = 0º; fk0 = 0,02; fkv = 0,00037 с2/м2; cd = 0,3; cl = 0,22; cm = 0,1.
3.1 ПИМ в рамочном режиме (с трастом FT = 349,8 Н)
Для оценки влияния аэро-питч-момента на устойчивость автомобиля (Hftx = 0) и квантомобиля (Hftx = 0,5) выполнили ряд имитаций МПДК в рамочном режиме с перебором значений cm в диапазоне –0,1÷0,15. Результаты см. рис. 8.
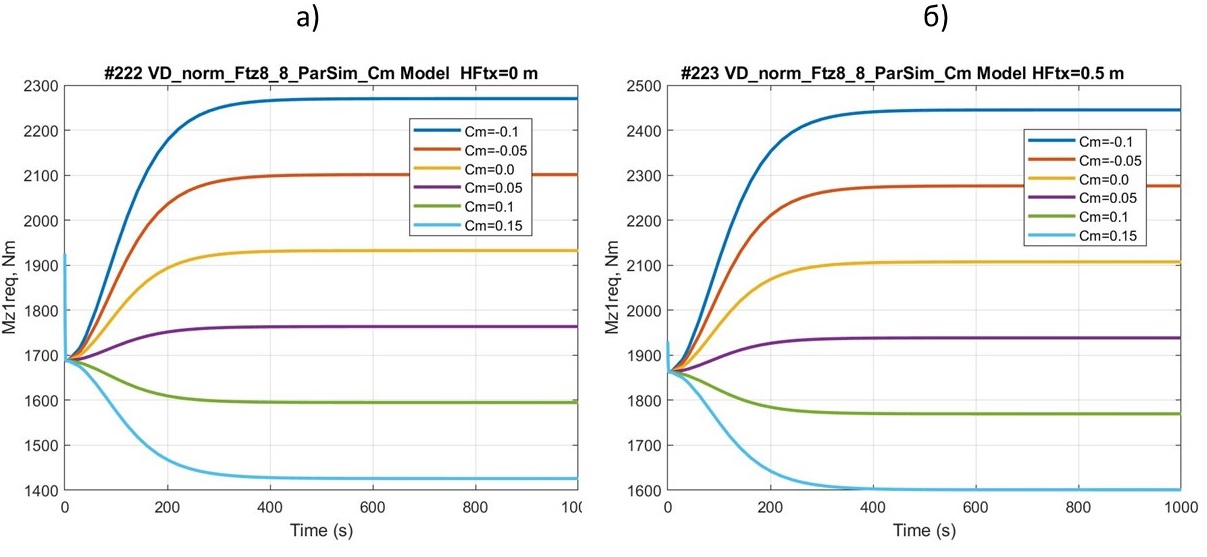
Рисунок 8 - Графики зависимости ТСМ Mz1req от значений коэффициента cm:
а) для автомобиля; б) для квантомобиля – при различных cm (fk0 = 0, fkv = 0)
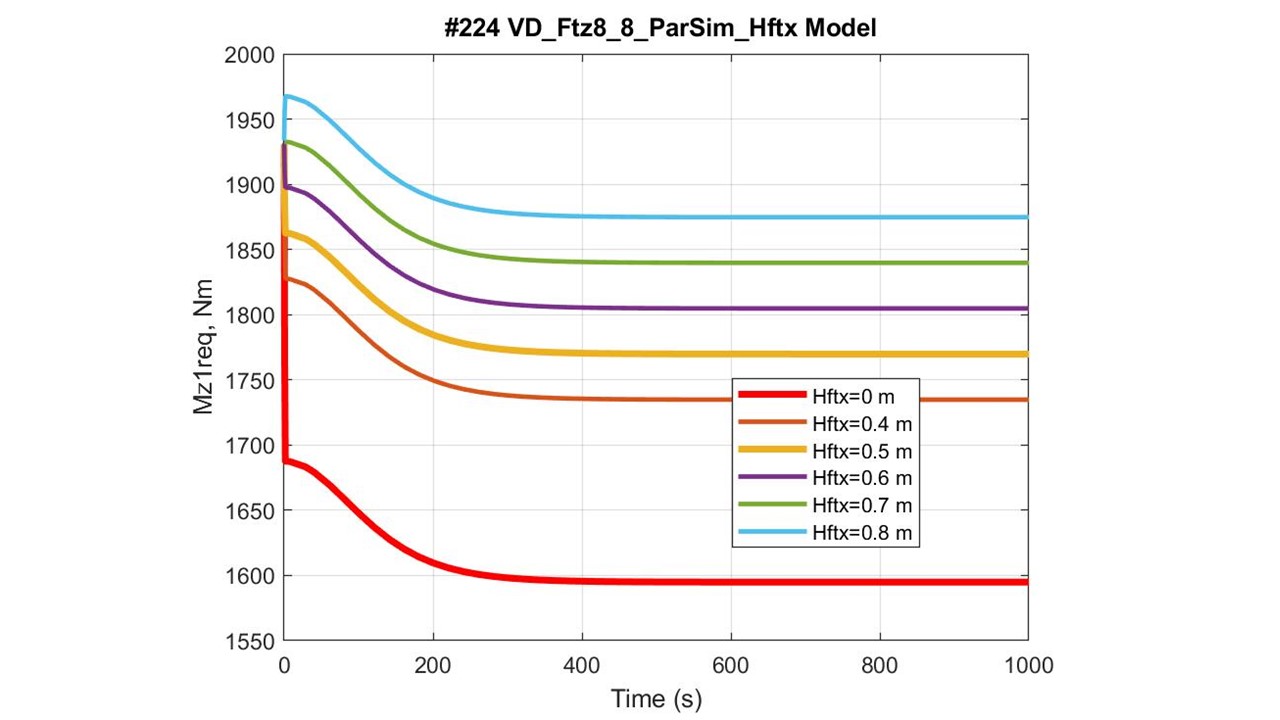
Рисунок 9 - Графики зависимости ТСМ Mz1req от высоты приложения тяговой силы: для автомобиля (Hftx = 0 м) и квантомобиля (Hftx = 0,4÷0,8 м)
3.2 ПИМ движения в дорожных условиях (с трастом FTx = 1500 Н)
При моделировании движения экипажа в дорожных условиях, естественно, задается уровень сопротивления качению колес.
На рис. 10 представлена обобщенная картина зависимости ТСМ Mz1req в процессе разгона ТС (автомобиля-аналога (а) и квантомобиля (б)) от значений коэффициента fk0. Использованы аэродинамические коэффициенты, характеризующие экипаж без специальных аэродинамических средств (САС): cd = 0,3; cl = 0,22; cm = 0,1.
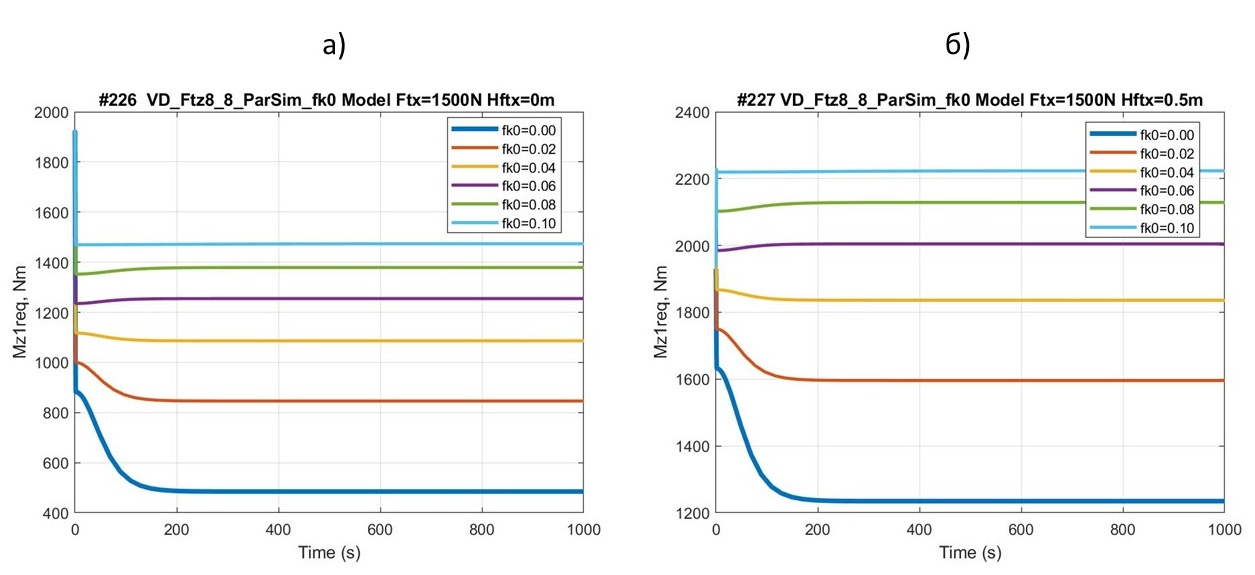
Рисунок 10 - Сравнительная картина зависимости ТСА Mz1req в процессе разгона ТС (автомобиля-аналога (а) и квантомобиля (б)) – от коэффициента fk0; аэродинамические коэффициенты: cd = 0,3; cl = 0,22; cm = 0,1
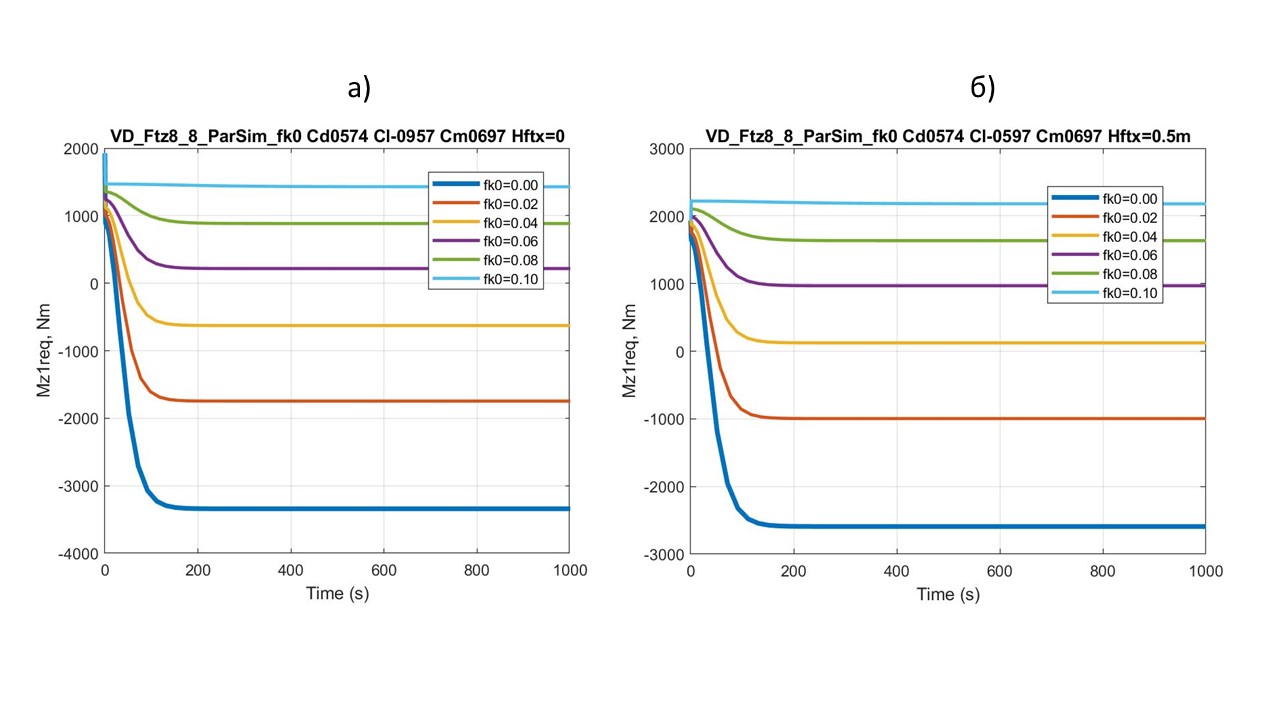
Рисунок 11 - Сравнительная картина зависимости ТСМ Mz1req в процессе разгона ТС с САС ((а) автомобиля-аналога и (б) квантомобиля) – от коэффициента fk0; аэродинамические коэффициенты: cd = 0,574; cl = –0,957; cm = 0,697
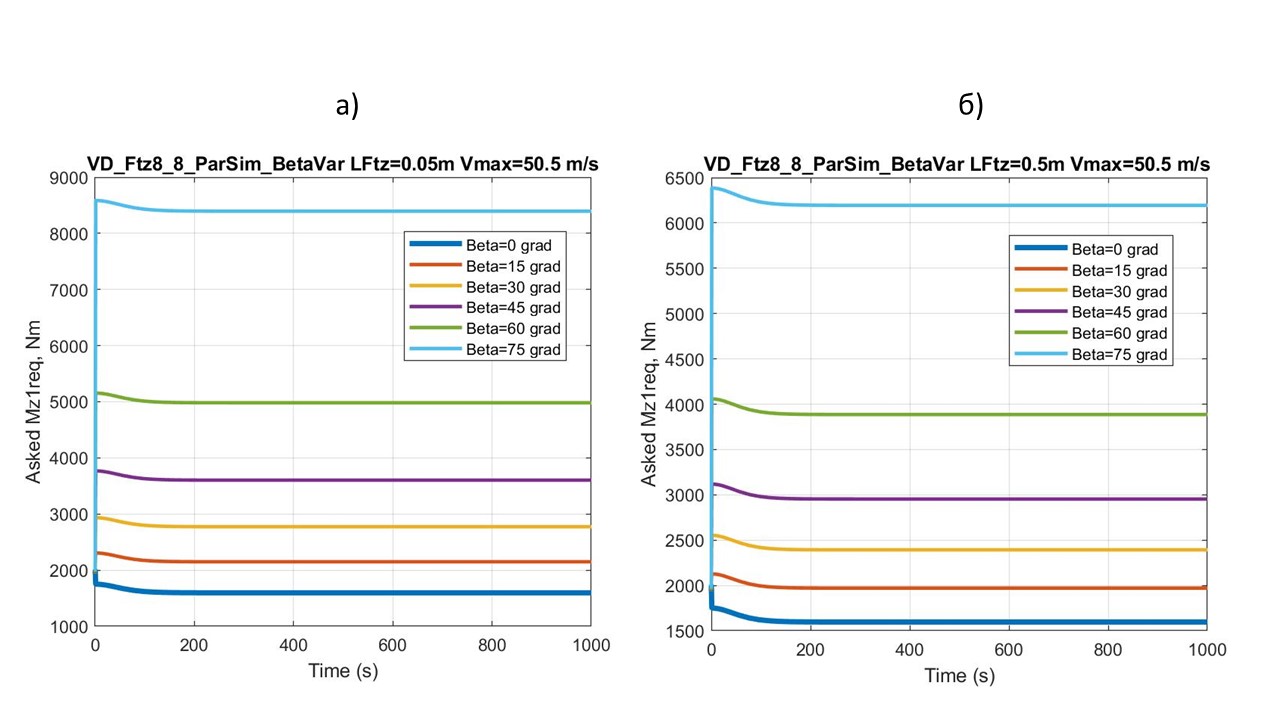
Рисунок 12 - Графики зависимости ТСМ Mz1req от угла наклона вектора траста β, в процессе разгона квантомобиля с выходом на крейсерскую скорость 50,5 м/с при fk0 = 0,02:
а) горизонтальная координата точки приложения траста LFtz = 0,05 м; б) точки приложения LFtz = 0,5 м
4. Обсуждение результатов ПИМ
Представленные результаты являются отражением действий автора по развитию концепции квантомобиля. Эта концепция возникла в трудах Леонова В.С. , , и, насколько известно, других вариантов развития концепции, кроме рассматриваемого здесь, пока нет. Поэтому уместно оценить достижения статьи с подключением идей предыдущих работ автора , , , .
В этих работах закладывались основы Simulink-моделирования движения квантомобиля, настраивались объекты-прототипы из числа существующих наземных ТС, главным образом модели КамАЗ-4326 . Это позволило развить S-модель до уровня, зафиксированного на рис. 4-5, и провести с её помощью расчетное исследование продольной устойчивости квантомобиля на представленном уровне.
Влияние коэффициента cm (см. рис. 8) на устойчивость – существенно. В диапазоне его варьирования от –0,1 до +0,15 размах изменений аэро-питч-момента у автомобиля составляет 850 Нм. Такой же размах будет и у квантомобиля, что для него более ущербно. Вполне понятно, что рост величины ТСМ Mz1req (в положительном направлении) связан с изменением аэро-питч-момента (и величины cm) в отрицательную сторону.
Значимость высоты действия траста (см. рис. 3) на устойчивость квантомобиля (см. рис. 9) оценим посредством количественного рассмотрения расчетного баланса моментов. Для автомобиля на стенде (Hftx = 0 м) ТСМ Для квантомобиля (Hftx = 0,5 м) ТСМ
В данном случае величина «клюющего» момента MFtx = 175 Нм по модулю составила примерно половину момента сил сопротивления воздуха MFw и десятую часть статического момента смещения центра тяжести экипажа относительно середины колесной базы MGqStat.
Заслуживает внимания сравнительная картина зависимости ТСМ Mz1req (автомобиля-аналога и квантомобиля) от значений коэффициента дорожного сопротивления качению колес fk0 (см. рис. 10). По сути, семейство кривых, характеризующих квантомобиль (рис. 10б), эквидистантно семейству кривых для автомобиля-аналога (рис. 10а). Оно всё смещено на величину ΔMz1req = FTx·HFTx = 1500Н·0,5м = 750 Нм. Объяснимо всё тем же «клюющим» моментом, создаваемым трастом КД. Размах значений ТСМ Mz1req в диапазоне значений fk0 0,0÷0,1 для обоих сравниваемых вариантов составляет ≈1000 Нм. Следует отметить, что зафиксированные на рис. 10 кривые разгона экипажей из-за различия значений fk0 при FTx = const заканчиваются разной конечной скоростью установившегося движения – более детализированный анализ топологии данных семейств отнесен автором на будущее.
Похожей оказалась и сравнительная картина зависимости ТСМ Mz1req в процессе разгона ТС с САС (автомобиля-аналога и квантомобиля) от значений коэффициента дорожного сопротивления fk0 (см. рис. 11). Семейство кривых, характеризующих квантомобиль (рис. 11б), топологически подобно семейству кривых для автомобиля-аналога (рис. 11а). Оно также всё смещено на свою величину ΔMz1req. Однако размах значений ТСМ Mz1req в диапазоне значений fk0 0,0÷0,1 для этих сравниваемых вариантов составляет ≈ 4800 Нм.
Таким образом, привнесение САС в конструкцию квантомобиля (нацеленное специально на создание максимально возможного прижатия экипажа к ОП за счет радикализации коэффициентов cd, cl, cm) привело к существенному изменению размаха возможных значений ТСМ Mz1req, что для устойчивости экипажа на разнообразии дорожных условий будет ущербным.
Зависимость ТСМ Mz1req от угла наклона вектора траста β (см. рис. 12) оказалась значимой. Анализ перемещения точки приложения траста вперед, к центру колесной базы (в примере c LFtz = 0,05 м до LFtz = 0,5 м) – позволил отметить, по крайней мере, два момента. Во-первых, это приводит к снижению ТСМ для всех углов β > 0° (особенно при больших углах – сравните 6200 Нм и 8300 Нм для β = 75°). Во-вторых, сужает размах значений ТСМ – сравните размах 6800 Нм для LFtz = 0,05 м и размах 4600 Нм для LFtz = 0,5 м.
Естественно, значения MFtz (а следовательно, и ТСМ при прочих равных параметрах) будут наименьшими при нахождении точки приложения траста в области центра колесной базы, но, при наличии противоречий компоновочного характера использование зависимостей типа представленных может явиться элементом соответствующих оптимизационных методик.
5. Заключение
Simulink-модель приземного движения квантомобиля (МПДК), созданная на базе рассмотрения схемы сил и моментов, действующих на квантомобиль, позволяет осуществлять проведение расчетных исследований как динамики продольного движения экипажа в дорожных условиях, так и имитации нагрузок в условиях аэродинамического стенда.
В целом, подтвердилась гипотеза: уровень и характер питч-момента квантомобиля отличается от такового для автомобиля. Он может быть значительным, иногда меняя направленность (относительно автомобильного варианта ТС) и требует его оперативной нейтрализации (минимизации).
На основе результатов ПИМ показана значимость проблемы обеспечения продольной устойчивости квантомобиля. Основными факторами, усугубляющими названую проблему, в сравнении с классическим автомобилем, являются возникновение и реализация тяговой силы над опорной поверхностью, что увеличивает опасность опрокидывания экипажа.
Для нейтрализации опрокидывающих моментов необходимы дополнительные вертикальные трастеры и другие средства, охватываемые единой системой управления с основным КД.
Основные средства управления аэродинамическим воздействием на экипаж: жесткие конструктивные элементы (обводы и оперение корпуса); выдвижное оперение; дополнительные стабилизирующих трастеры – как показали проведенные расчеты, способны существенно изменять питч-моменты квантомобиля, с увеличением зависимости их от дорожных условий.
Сформированные на базе программы МПДК методические положения оценки продольной устойчивости квантомобиля могут послужить основой расчетной оптимизации компоновок этого вида ТС, расположения силовых модулей (трастеров) и САС, задействования их в процессе движения.
Сформирована методика использования существующих материалов испытаний автомобилей-аналогов для прогнозирования устойчивости квантомобилей.
Расчеты в среде МПДК позволили преодолеть познавательную сложность отображения и количественной оценки параметров продольного движения гипотетического квантомобиля. МПДК можно рассматривать как важную компоненту структуры дальнейших исследований квантомобиля.