ОЦЕНКА ПРОДОЛЬНОЙ УСТОЙЧИВОСТИ КВАНТОМОБИЛЯ НА БАЗЕ ПОКАЗАТЕЛЕЙ АЭРОДИНАМИКИ АВТОМОБИЛЯ-АНАЛОГА
ОЦЕНКА ПРОДОЛЬНОЙ УСТОЙЧИВОСТИ КВАНТОМОБИЛЯ НА БАЗЕ ПОКАЗАТЕЛЕЙ АЭРОДИНАМИКИ АВТОМОБИЛЯ-АНАЛОГА
Аннотация
Целью расчетного исследования явилась оценка устойчивости продольного движения квантомобиля (наземного транспортного средства с квантовым двигателем (КД)) на базе аэродинамических характеристик автомобиля-аналога. Методы включают: рассмотрение силового баланса квантомобиля, баланса моментов сил и нормальных реакций колес; учет особенностей сил воздействия воздуха; адаптацию результатов аэродинамических испытаний автомобиля-аналога к моделированию квантомобиля. С учетом перечисленного сформирована Simulink-модель приземного движения квантомобиля, положенная в основу имитационной системы из нескольких подсистем, две из которых – Vehicle Dynamics и NormReactions – непосредственно используются для расчета результатов исследования. Среди оценочных показателей значения продольного опрокидывающего момента, нормальных реакций на колеса, коэффициента аэродинамической устойчивости (отношение аэродинамического питч-момента к суммарному опрокидывающему моменту). Результаты расчетов, проведенных с привлечением данных по автомобилю-прототипу, охватывают имитацию разгонов и крейсерских режимов квантомобиля – как в условиях аэродинамического стенда, так и в дорожных условиях. Варьируемые параметры: коэффициенты аэродинамического воздействия, координаты точки приложения траста к корпусу экипажа, коэффициенты сопротивления качению опорных колес. Результаты расчетов позволили оценить значимость продольных опрокидывающих и необходимых стабилизирующих моментов экипажа. Выводы. Продольная неуравновешенность квантомобиля в движении отличается от таковой для автомобиля. Для нейтрализации опрокидывающих моментов необходимы дополнительные вертикальные трастеры и другие средства стабилизации, охватываемые единой системой управления с основным КД. Сформированная S-модель может послужить как средством выработки конструктивных схем квантомобилей, так и оперативным решателем задействования стабилизирующих элементов на борту квантомобиля. Новизну работы можно считать существенной, в силу отсутствия сведений о подобных концептуальных исследованиях гипотетического квантомобиля.
1. Введение
На базе идей извлечения энергии из физического вакуума (ФВ) , , , учеными рассматриваются концепции квантовых двигателей (КД), способных найти применение, в том числе, на транспорте , , , . И хотя получаемые импульсы траста (тяги) КД пока малы, надежда на масштабную реализацию названых идей становится все более существенной , , . Предположение, что физики задачу извлечения энергии ФВ решат успешно, а инженеры создадут работоспособные конструкции КД, вызывает необходимость рассмотрения особенностей использования траста КД для движения транспортного средства (ТС) , , , .
Основная особенность ТС с КД заключается в том, что КД по схеме воздействия на экипаж подобен реактивному двигателю (РД). Однако в отличие от РД (где траст создается как реакция на импульс отбрасываемой массы газов, получая эту массу в качестве опоры), КД создает траст за счет деформации поля ФВ, обеспечивая опору трасту во внешней части задействованного фрагмента поля , . Иллюстрация на рис. 1 , отображает схему деформации поля ФВ, обеспечивающего за счет градиента сил возникновение направленного траста.
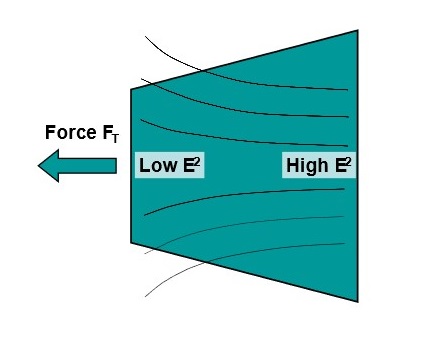
Рисунок 1 - Градиент плотности поля E2 в конусном резонаторе, приводящий к возникновению траста FT
При возможности переводить вектор траста в наклонное положение можно за счет вертикальной составляющей этого вектора осуществлять прижим экипажа к ОП, либо его вывешивание. Это также видоизменит схему сил и моментов традиционных наземных ТС .
Разница в величинах вертикальных нагрузок на опорные колеса экипажа, с точки зрения сохранения продольной устойчивости, для автомобиля в большинстве случаев имеет второстепенное значение – поскольку при движении автомобиля названые нагрузки отражаются встречными реакциями твердой ОП, что обеспечивает продольную устойчивость. В случае квантомобиля, однако, во-первых, из-за отсутствия ограничений по сцеплению колес с ОП возможна реализация тяговой силы, превосходящей допустимую для автомобиля. Во-вторых, траст, вывешенный над ОП, формирует составляющую опрокидывающего момента, отсутствующую в автомобильном варианте кинематической схемы. В-третьих, в отсутствие твердой опоры вывешенный (даже частично) квантомобиль получит склонность к вращательному движению в плоскости тангажа .
Вывешивание (лифт) может привести к реализации режимов летательного аппарата. Реализация прижимающей силы (антилифт) при движении ТС в воде может позволить даже реализацию режима подводной лодки. Это привело к идее всесредного мультимодального квантомобиля (ВМК) . Скоростные характеристики режимов ВМК в различных средах будут отличаться – и проблемным станет выбор конфигураций кузовов: универсальных, либо изменяемых, либо в комбинации. Находясь в русле концепции ВМК, ограничимся, однако, наземным ТС и влиянием аэродинамики на устойчивость его продольного движения по ОП – как базовой среды его функционирования и базирования.
В формирование суммарного опрокидывающего момента (питч-момента) вносят вклад три группы сил: сопротивления качению колес, силы инерции и силы аэродинамического воздействия , , . Сосредоточим внимание на последнем аспекте. В целом же гипотезой представляемого исследования можно считать утверждение: Уровень и характер питч-момента квантомобиля отличается от такового для автомобиля, может быть значительным и требует его оперативной нейтрализации (минимизации).
2. Методы и принципы исследования
2.1 Цель и задачи исследования
Обобщая изложенное, целью исследования поставили моделирование и оценку продольной устойчивости квантомобиля на базе материалов аэродинамических испытаний автомобиля-аналога.
Устранение трансмиссии, перенос движительных функций с опорных колес на КД, появление возможности осуществлять лифт и антилифт наземного ТС – всё это, в отсутствие теоретических основ движения квантомобиля и эмпирических данных, вызывает необходимость использовать подход с опорой на программное имитационное моделирование (ПИМ).
Задачами по достижению цели являются:
1) формирование математической модели (ММ) продольного движения квантомобиля (МПДК) под поставленную цель;
2) построение Simulink-модели функционирования наземного ТС с охватом имитации стендовых аэродинамических испытаний и дорожного движения, с отработкой интерфейса взаимодействия с моделью и вывода данных;
3) на базе Simulink-модели проведение ПИМ, покрывающего некоторое множество вариантов испытаний наземного ТС – с целью формирования методики привлечения существующих материалов испытаний автомобилей-аналогов для прогнозирования устойчивости квантомобилей;
4) обсуждение и обобщение результатов расчетов с получением оценок продольной устойчивости квантомобиля;
5) формирование рекомендаций и выводов.
2.2 Вектор траста и особенности его использования в МПДК
В рамках продольного движения экипажа в плоскости развёртывания угла тангажа β вектор траста FT раскладывается на две ортогональные компоненты FTx и FTz :
Угол наклона вектора FT
При этом угловой диапазон обметания вектора траста составляет в общем случае от 0° до 360° (квадранты I и IV – тяга вперед, квадранты II и III – тяга назад, при этом квадранты I и II – лифт, квадранты III и IV – антилифт). Ограничимся приземным (без отлета) движением квантомобиля (0 ≤ FTz ≤ Gq, где Gq – вес экипажа) по горизонтальной ОП. Также, приняв вертикальные перемещения ТС при наземном движении несущественными (в сравнении с его горизонтальными перемещениями), освободимся от учета динамики вертикальных перемещений ТС.
2.3 Силовой баланс квантомобиля
В качестве основы модели движения экипажа по горизонтальной ОП выбран следующий вариант уравнения силового баланса квантомобиля :
где FTx – продольная сила тяги КД (траст), Н;
Fr – сила сопротивления качению опорных колес, Н;
Fwx – сила сопротивления воздуха продольному движению (drag), Н;
Fa – сила инерции, противодействующая ускорению экипажа, Н;
Gq' – сила давления экипажа на ОП с учетом лифта/антилифта, Н;
fk0 – коэффициент сопротивления качению колес при нулевой скорости;
fkv – скоростной коэффициент сопротивления качению колес, с2/м2;
Vq – текущая скорость продольного движения экипажа, м/с;
cd – коэффициент аэродинамического сопротивления, безразмерный;
ρw – плотность воздуха, Н ×с2/м4;
Sfront – лобовая площадь экипажа, м2;
Gq – исходный вес (сила тяжести) экипажа, Н;
g – ускорение свободного падения, м/с2;
a – продольное ускорение экипажа, м/с2;
δwh – коэффициент инерции вращения опорных колес экипажа.
Детализируем величину Gq', а именно:
где Fwz – аэродинамическая подъемная сила, Н. Для квантомобиля приведенная масса m’ = Gq(1+δwh)/g учитывает только вращение опорных колес, поскольку вращающиеся детали силового привода отсутствуют.
Отметим, что
Также отметим, что при представлении выражений программного алгоритма (представляемого на Simulink-схемах) используется нотация Simulink (прямая латиница, без индексов). например:
График прикладываемых к экипажу сил отображен на рис. 2. Обозначены: Vq – скорость движения экипажа; V∞ – скорость невозмущенного воздушного потока относительно экипажа , , , ; Cg – центр тяжести (ЦТ) экипажа; Gq – сила тяжести экипажа; Fa – приведенная сила инерции экипажа; CFT – точка приложения траста КД к корпусу экипажа; FT, FTx и FTz – сила тяги КД (траст) и ее покоординатные компоненты; Cw – центр давления (ЦД) аэродинамических сил , , ; Fw, Fwx и Fwz – сила воздействия воздуха и/или ее покоординатные компоненты; Ff1 и Ff2 – силы сопротивления качению передних и задних колес, соответственно; Tf1 и Tf2 – моменты сопротивления качению колес; hFwx, hFTx, hg – расстояния векторов соответствующих сил Fwx, FTx, Fa от ОП; lFwz, lFTz – расстояния векторов соответствующих сил Fwz, FTz до вертикали от оси задних колес; l0 – расстояние вектора силы Fwz до вертикали центра колесной базы; Lwb, L1 и L2 – расстояния базовое и от осей колес до проекции ЦТ на ОП; A и B – центральные точки пятен контакта колес с ОП; Rz1 и Rz2 – нормальные реакции ОП.
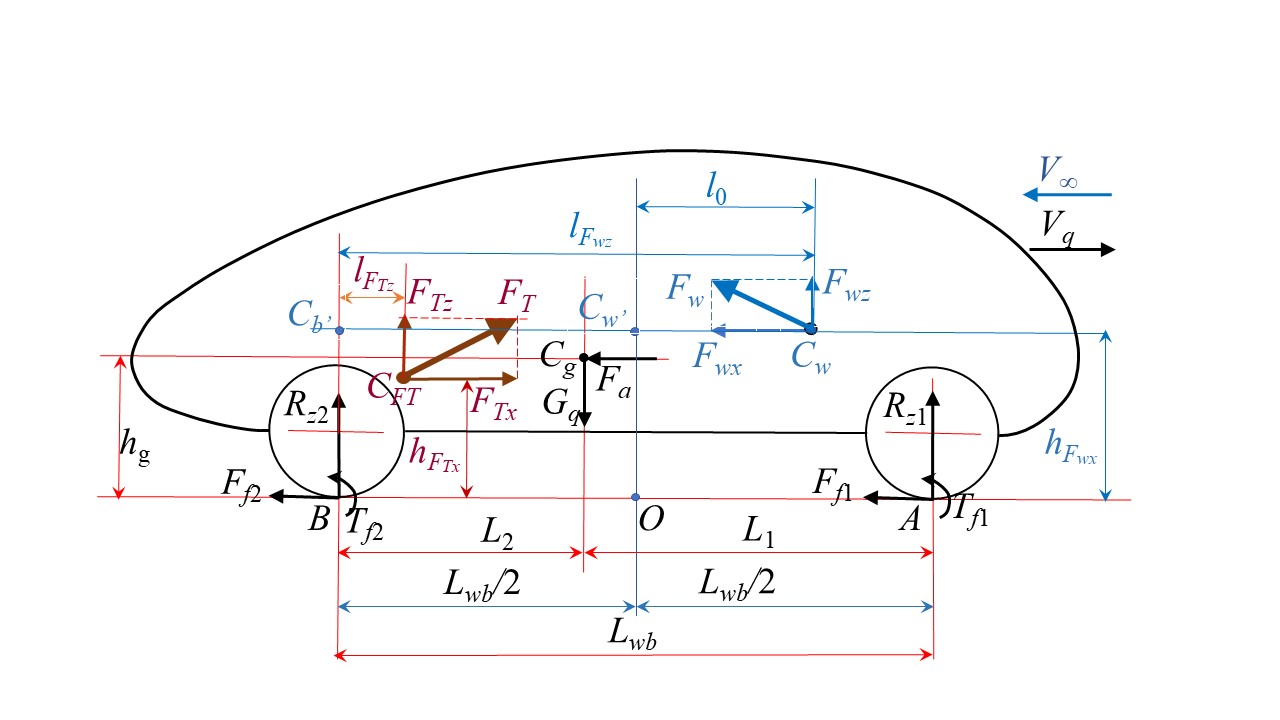
Рисунок 2 - Схема сил, действующих на квантомобиль
Формирование опрокидывающих моментов квантомобиля разберем с помощью рис. 2. Из характерных точек, используемых обычно при анализе баланса моментов – ЦТ (Cg) или точки контакта колес с ОП (A либо B) – выбираем точку контакта с ОП задних колес , , (в сравнении с ЦТ она обладает преимуществом – постоянством расположения). В точке B размещаем начало связанной системы координат (ССК): ось x по направлению к передку экипажа, ось z вверх; положительные питч-моменты – здесь против часовой стрелки.
Сумма моментов относительно точки B :
Учтем, что ,
где rд – динамический радиус колеса.
Коэффициент сопротивления качению
Реактивный момент, возникающий в движении от действия нормальной реакции ОП на колеса передней оси (относительно точки B)
не является искомым питч-моментом, поскольку опрокидывающее воздействие производит момент MΣpm=Lwb·(Rz1–Rz2)/2. И требуемый (requested) стабилизирующий момент (ТСМ) тогда равен Mz1req = –MΣpm.
Для оценки значимости аэродинамического момента MFw = MFwx+MFwz относительно ТСМ Mz1req ввели коэффициент
2.5 Адаптация МПДК к форме представления результатов испытаний автомобилей
Необходимым явился учет в МПДК формы представления результатов аэродинамических испытаний автомобилей, отображенной ниже.
Фронтальное сопротивление (драг) представляется выражением , ,
где Q – скоростной динамический напор;
воздействие силы лифта на экипаж , , :
аэро-питч-момент , , :
где cd, cl и cm – коэффициенты драга, лифта и аэро-питч-момента, получаемые по результатам испытаний объектов в аэродинамической трубе (в данном исследовании считаем их постоянными во всем диапазоне скоростей).
Замысел состоял в том, чтобы в МПДК использовать данные по этим коэффициентам, зафиксированные для автомобилей в стендовых условиях.
На высоте hFwx (см. рис. 2) существует ЦД Cw сил Fwz и Fwx – на расстоянии lFwz от вертикальной плоскости задней оси и расстоянии lO от вертикальной плоскости центра колесной базы.
По теореме Пуансо можно перенести силу Fwz в точку Cw' на вертикальной плоскости центра колесной базы (это будет сила Fl=Fwz), с возникающим при переносе моментом сил MFl .
Выявим связь координаты ЦД по горизонтали с результатами испытаний модели ТС в аэродинамической трубе следующим образом. Убедимся в возможности разложения на две составляющие коэффициента cm = cmd+cml:
,
где MFd – момент драга Fd относительно ОП, MFl – момент смещения силы лифта Fl с появлением плеча lO.
Теперь можем записать:
Отсюда получим:
Далее, перемещение тем же способом силы Fwz из точки Cw' в точку Cb' добавит момент приводя к сумме:
После сокращения получаем .
Откуда горизонтальная координата ЦД в ССК:
Рассмотренные на базе теоремы Пуансо особенности горизонтального смещения силы лифта Fl (Fwz) верны и для других вертикальных сил схемы рис. 2: Gq и FTz. И поскольку аэро-питч-момент в стендовых условиях определяется с опорой на колесную базу Lwb с центром в точке O, то и моменты других вертикальных сил должны рассчитываться с плечами относительно точки O, а именно, . Этим из общего баланса моментов сил (6) вычленяется совокупность воздействий, образующих только опрокидывающий момент MΣpm.
2.6 Влияние высоты действия траста КД на питч-момент
В практике испытаний моделей автомобилей в аэродинамической трубе опорные элементы модели крепят к опорному столу , , , . Схема баланса сил отображена на рис. 3а. Места крепления соответствуют точкам приложения тяговых сил Rxw1 и Rxw2 в пятнах контакта колес с ОП в условиях дорожного движения. Для квантомобиля, однако, траст FTx вывешен над ОП на высоте hFTx (см. рис. 3б) – что требует воплощения некоего вычислительного перехода. Рассмотрим это с помощью рис. 3.
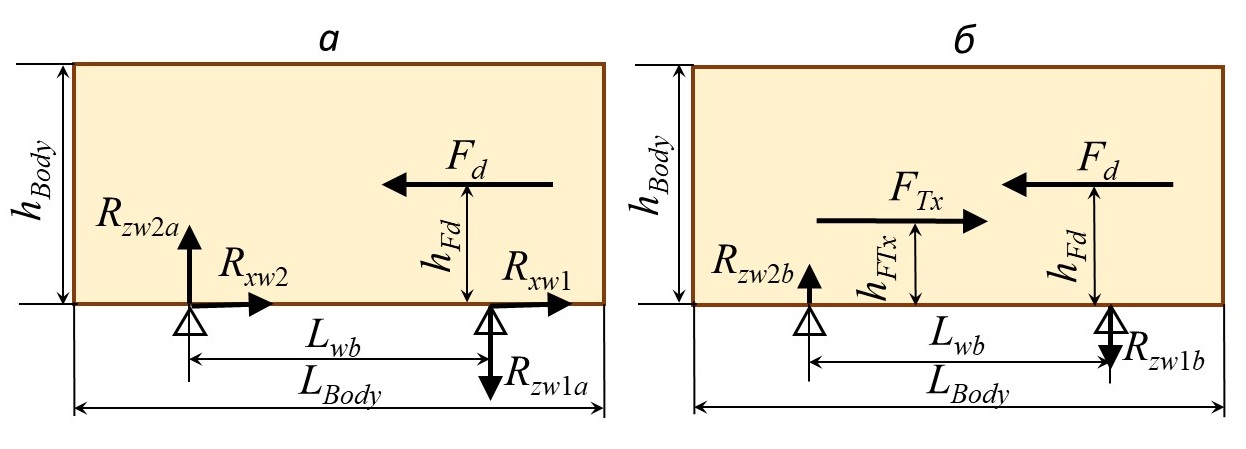
Рисунок 3 - Схемы баланса сил, действующих на тело:
а) – закрепленное в аэродинамической трубе к ОП стола; б) – с имитацией траста FTx, действующего над ОП
Для перехода ко второй ситуации (по рис. 3б) необходим учет изменения питч-момента из-за вывешивания силы FTx над ОП на высоту hFTx. Тогда результирующий аэро-питч-момент:
2.7 Simulink-модель приземного движения квантомобиля (МПДК)
Рассмотренный аналитический материал привлечен для формирования имитационной системы МПДК, две подсистемы которой – Vehicle Dynamics (рис. 4) и NormReactions (рис. 5) – усовершенствованы (относительно ) и используются для проведения представляемого исследования.
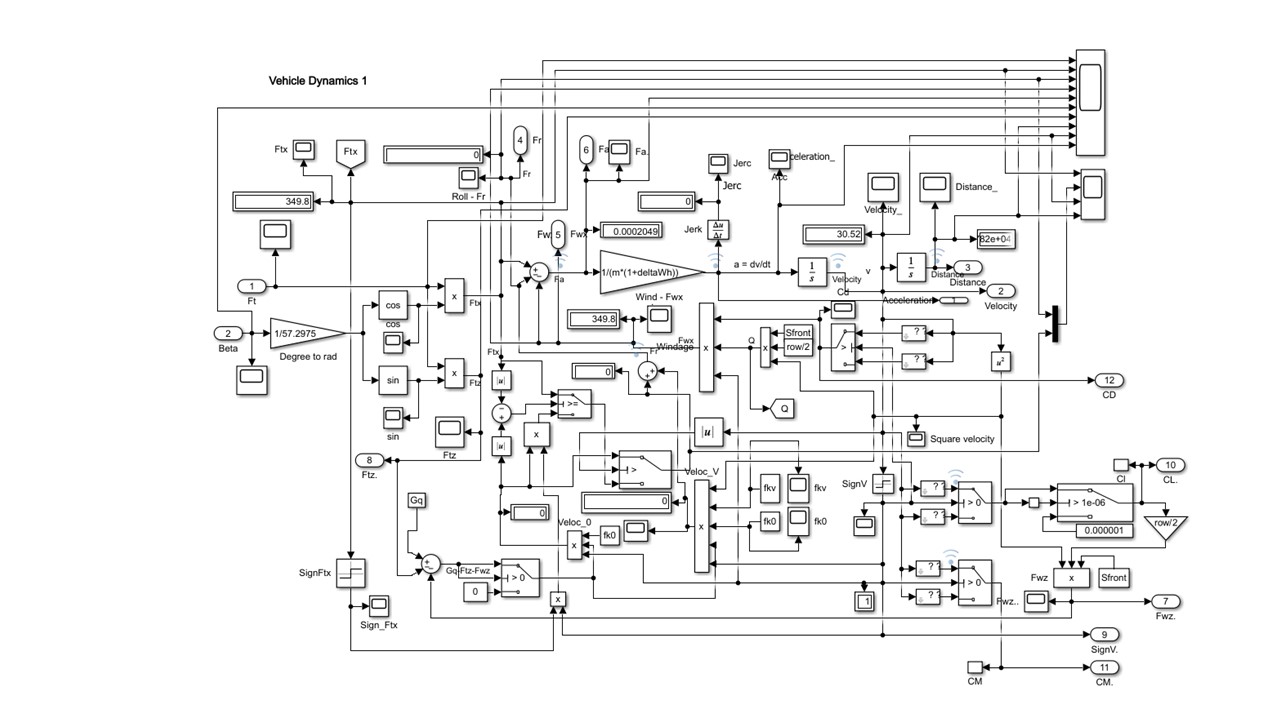
Рисунок 4 - Подсистема Vehicle Dynamics расчета показателей движения
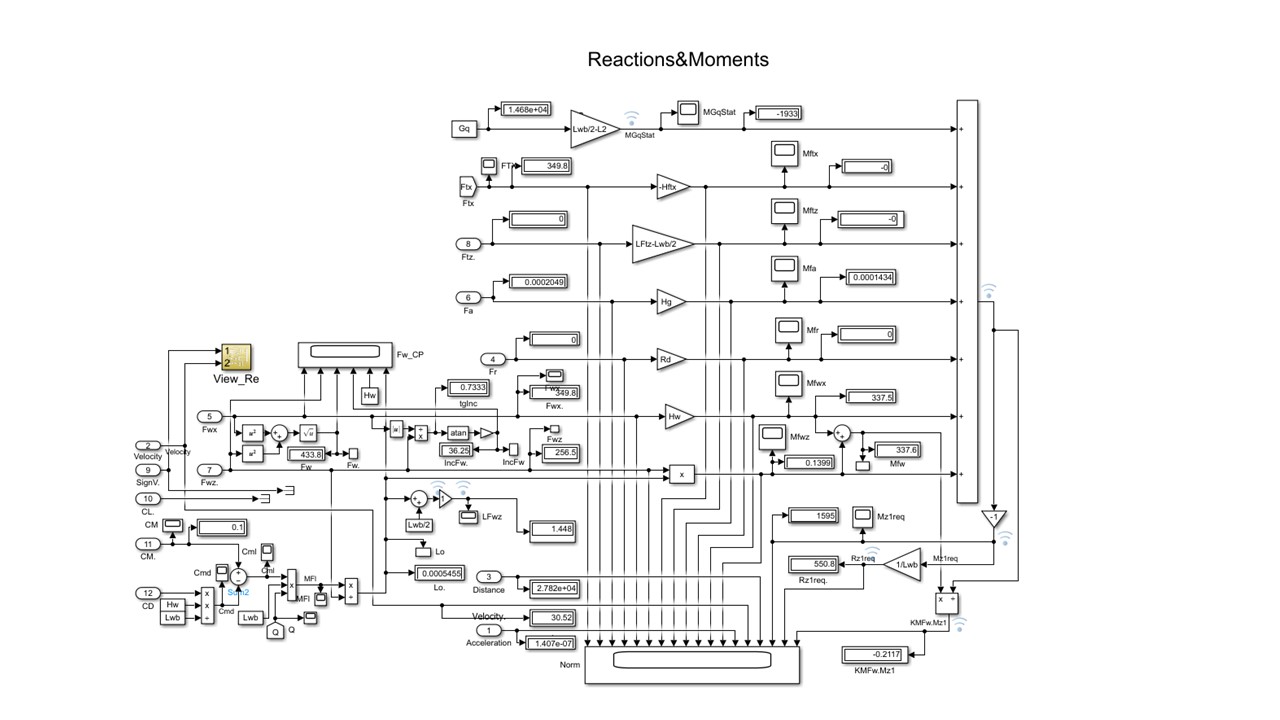
Рисунок 5 - Подсистема NormReactions расчета силовых моментов
Примечание: зафиксировано состояние при моделировании обдува на стенде ТС Баруха: V∞ = 30,5 м/с; Ftx =349?8 H; HFtx = 0 м
Верификация программы МПДК под вариант моделирования стендовых испытаний состояла в реинжиниринге в среде ПИМ состояния автомобиля, закрепленного на столе стенда (с отключенным блоком качения колес: fk0=0, fkv=0). При этом задавали высоту траста КД hFTx = 0 (нереальная высота для КД квантомобиля, но вариант представления тяговой силы, реализуемой ведущими колесами автомобиля в точках контакта с ОП). Задавали зафиксированные в натурном эксперименте значения коэффициентов cd, cl, cm. Далее, подобрав соответствующую силу тяги FTx, выполняли разгон виртуальной модели, заканчивающийся установившимся движением на скорости V∞ обдува натурной модели в трубе. Оценивали сходимость и невязки натурных и виртуальных экспериментов.
В качестве иллюстрации методики приведем действия на базе примера из классической работы Баруха – см. рис. 6.
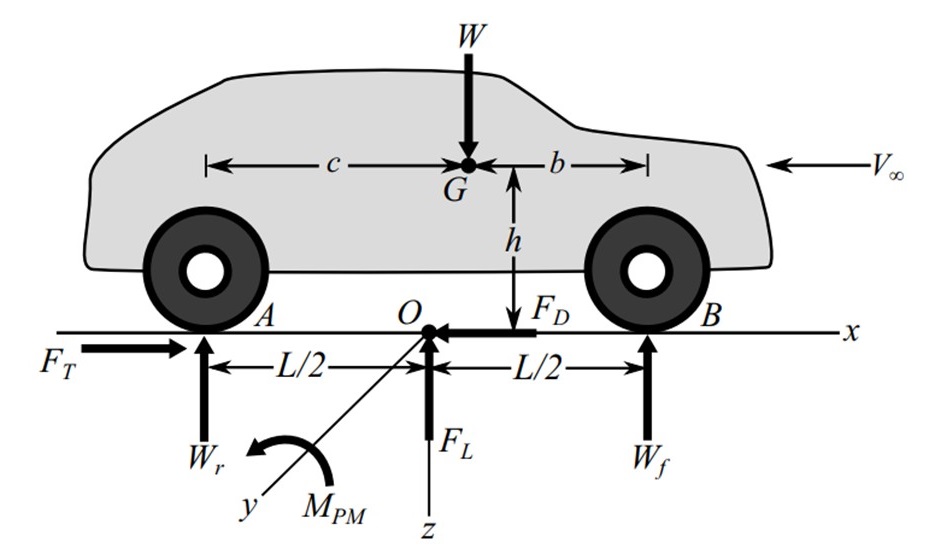
Рисунок 6 - Схема сил и моментов, действующих на автомобиль, закрепленный к столу аэродинамической трубы
Таблица 1 - Результаты измерений Баруха на аэродинамическом стенде
Скорость потока V∞ | Wf | Wr | FT | ||||
ft/s | м/с | lb | Н | lb | Н | lb | Н |
0 | 0 | 1800 | 8006 | 1500 | 6672 | 0 | 0 |
100 | 30,48 | 1745 | 7761 | 1498 | 6661 | 78,65 | 349,8 |
Разность показателей | - | -245 | - | -11 | - | 349,8 | |
Скоростной напор для скорости V = 30,48 м/с; Q = (ρ/2)SfrontV2 = 0,6125·2,044·30,482 = 1163 Н. Оценка cd = FT/Q = 349,8/1163 = 0,3. Oценка cl = Fl/Q = (245+11)/1163 = 0,22. Оценка питч-момента для скорости V = 30,48 м/с по формуле Баруха Тогда cm = Mpm/(Q·Lwb) = 339/(1163·2,8956) = 0,1.
Далее, в МПДК ввели в исходных данных cd = 0,3, cl = 0,22, cm = 0,1. Вычислили hFd = cm·Lwb /cd = 0,1·2,8956 / 0,3 = 0,9652 м. Реализовали имитацию разгона модели ТС (иначе – воздушного потока) c трастом FTx = 349,8 H (иначе – драга FD) до установившегося движения (соблюдая условие: fk0 = 0, fkv = 0).
Результаты имитации можно видеть на распечатке конечного состояния подсистемы Reactions&Moments в режиме виртуального установившегося движения ТС Баруха (точнее, потока воздуха относительно закрепленного экипажа) – рис. 5. На рис. 7 представлены графики виртуального разгона (точнее – потока воздуха) ТС Баруха и квантомобиля.
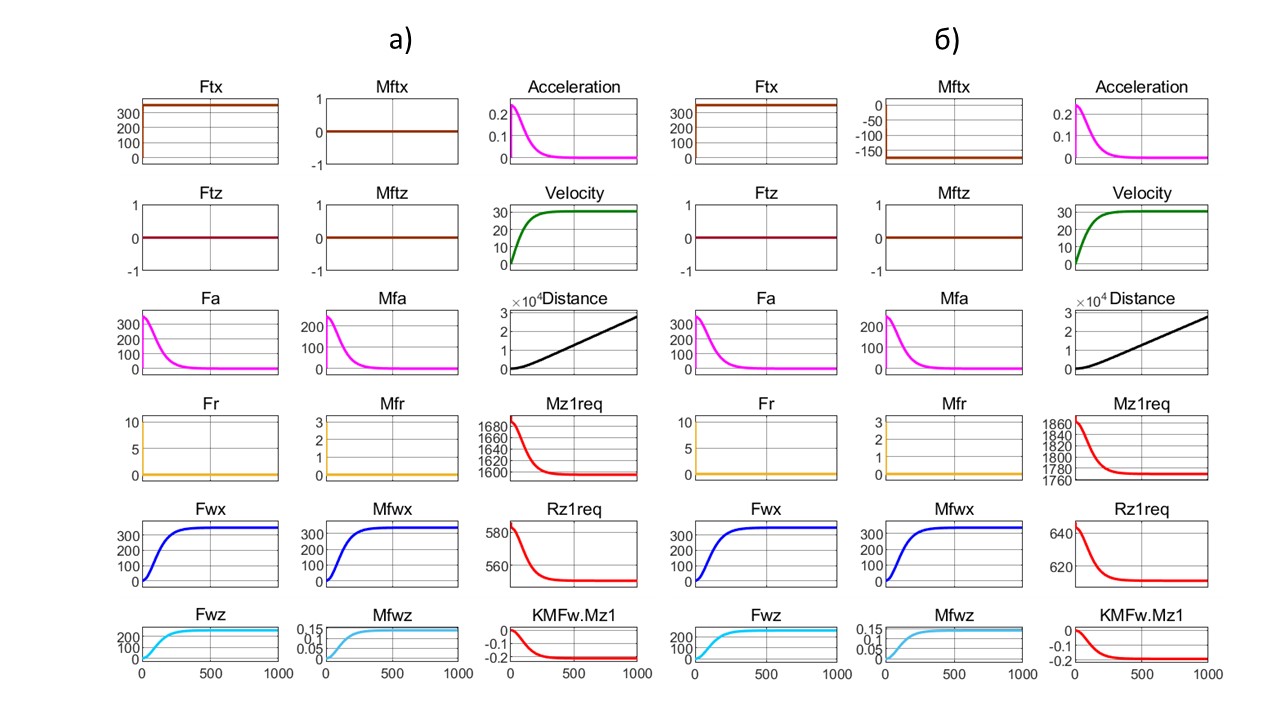
Рисунок 7 - Графики виртуального разгона ТС под условия стенда с конечной установившейся скоростью обдува V∞ = 30,5 м/с (сd = 0,3; сl = 0,22; сm = 0,1; fk0 = 0, fkv = 0):
а) автомобиль – HFtx = 0 м; б) квантомобиль – HFtx = 0,5 м
Таблица 2 - Сравнение результатов стендовых испытаний Баруха и реинжиниринга посредством МПДК
Вариант исследо-вания | Показатели | ||||||||
Скорость V, м/с | LFlO (lO), м | LFwz, м | Fwx, Н | MFwx, Нм | Fwz, Н | MFwz, Нм | Rz1req, Н | Mz1req, Нм | |
Стенд | 30,48 | 0 | 1,4478 | 349,8 | 336,9 | 256 | 370,6 | -244,2 | -707,4 |
МПДК | 30,52 | 0 | 1,448 | 349,8 | 337,5 | 256,5 | 371,5 | -244,5 | -709 |
3. Результаты программного имитационного моделирования
С целью количественной оценки динамики и продольной устойчивости квантомобиля посредством МПДК провели расчеты разгонов с выходом на установившийся режим. Опорными выбрали значения траста: для рамочного исследования аэродинамики (имитации условий стенда с отсутствием качения колес) – FT = 349,8 Н; для исследования динамики и устойчивости движения в дорожных условиях – FT = 1500 Н. Базовые данные автомобиля-прототипа и среды: Gq = 14680 Н; Lwb = 2,8956 м; Sfront = 2,044 м2; δwh = 0,04; fk0 = 0,02; fkv = 0,00037 с2/м2; ρw = 1,225 Н×с2/м4. Базовыми значениями параметров квантомобиля (однако варьируемых попеременно в той или иной серии расчетов), явились следующие: Hftx = 0,5 м; Lftz = 0,05 м; ; β = 0º; fk0 = 0,02; fkv = 0,00037 с2/м2; cd = 0,3; cl = 0,22; cm = 0,1.
3.1 ПИМ в рамочном режиме (с трастом FT = 349,8 Н)
Для оценки влияния аэро-питч-момента на устойчивость автомобиля (Hftx = 0) и квантомобиля (Hftx = 0,5) выполнили ряд имитаций МПДК в рамочном режиме с перебором значений cm в диапазоне –0,1÷0,15. Результаты см. рис. 8.
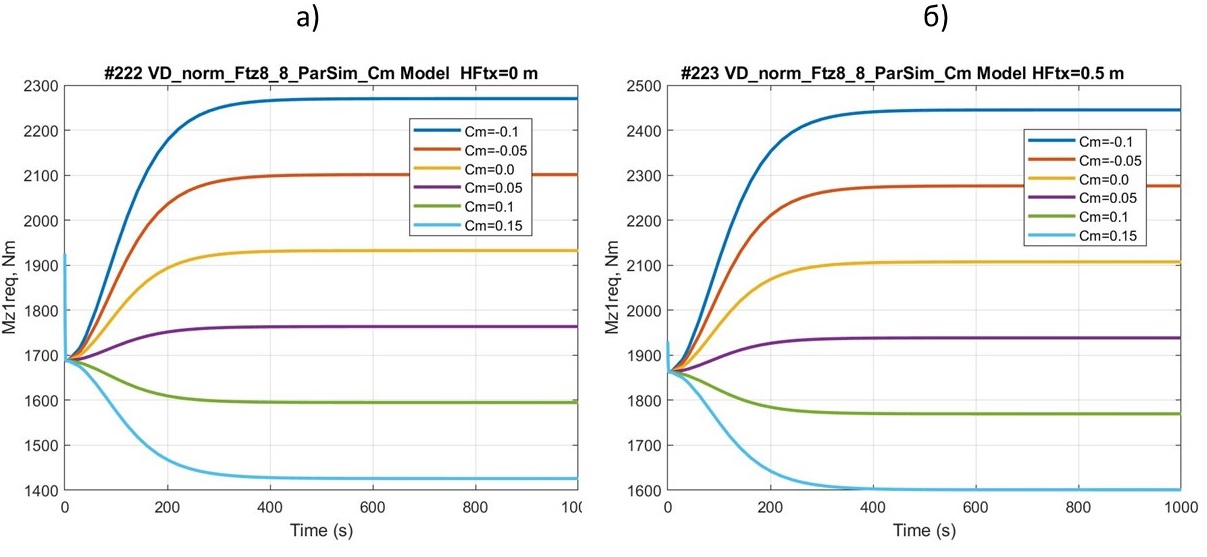
Рисунок 8 - Графики зависимости ТСМ Mz1req от значений коэффициента cm:
а) для автомобиля; б) для квантомобиля – при различных cm (fk0 = 0, fkv = 0)
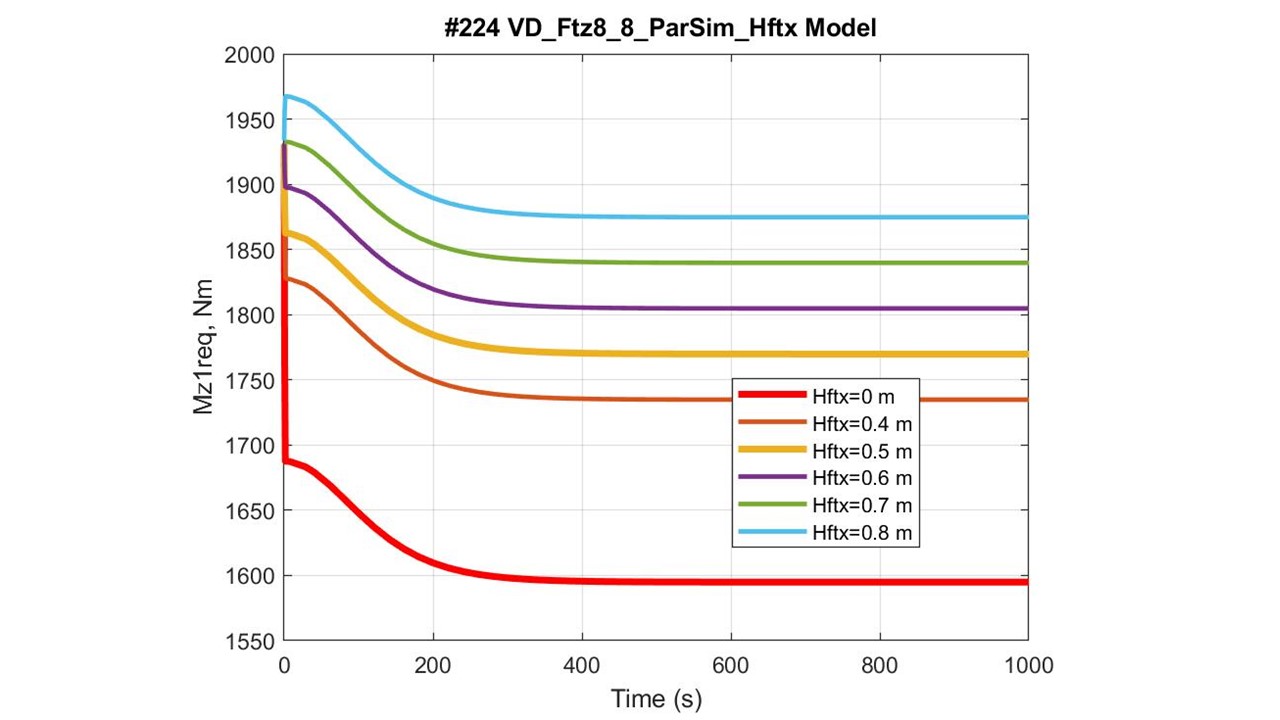
Рисунок 9 - Графики зависимости ТСМ Mz1req от высоты приложения тяговой силы: для автомобиля (Hftx = 0 м) и квантомобиля (Hftx = 0,4÷0,8 м)
3.2 ПИМ движения в дорожных условиях (с трастом FTx = 1500 Н)
При моделировании движения экипажа в дорожных условиях, естественно, задается уровень сопротивления качению колес.
На рис. 10 представлена обобщенная картина зависимости ТСМ Mz1req в процессе разгона ТС (автомобиля-аналога (а) и квантомобиля (б)) от значений коэффициента fk0. Использованы аэродинамические коэффициенты, характеризующие экипаж без специальных аэродинамических средств (САС): cd = 0,3; cl = 0,22; cm = 0,1.
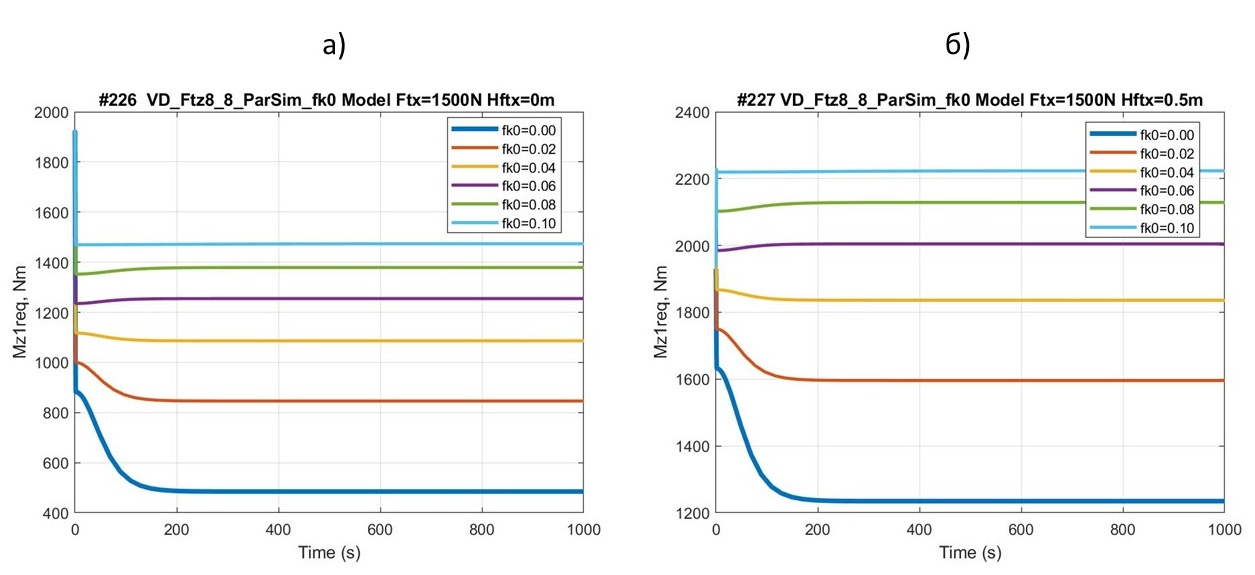
Рисунок 10 - Сравнительная картина зависимости ТСА Mz1req в процессе разгона ТС (автомобиля-аналога (а) и квантомобиля (б)) – от коэффициента fk0; аэродинамические коэффициенты: cd = 0,3; cl = 0,22; cm = 0,1
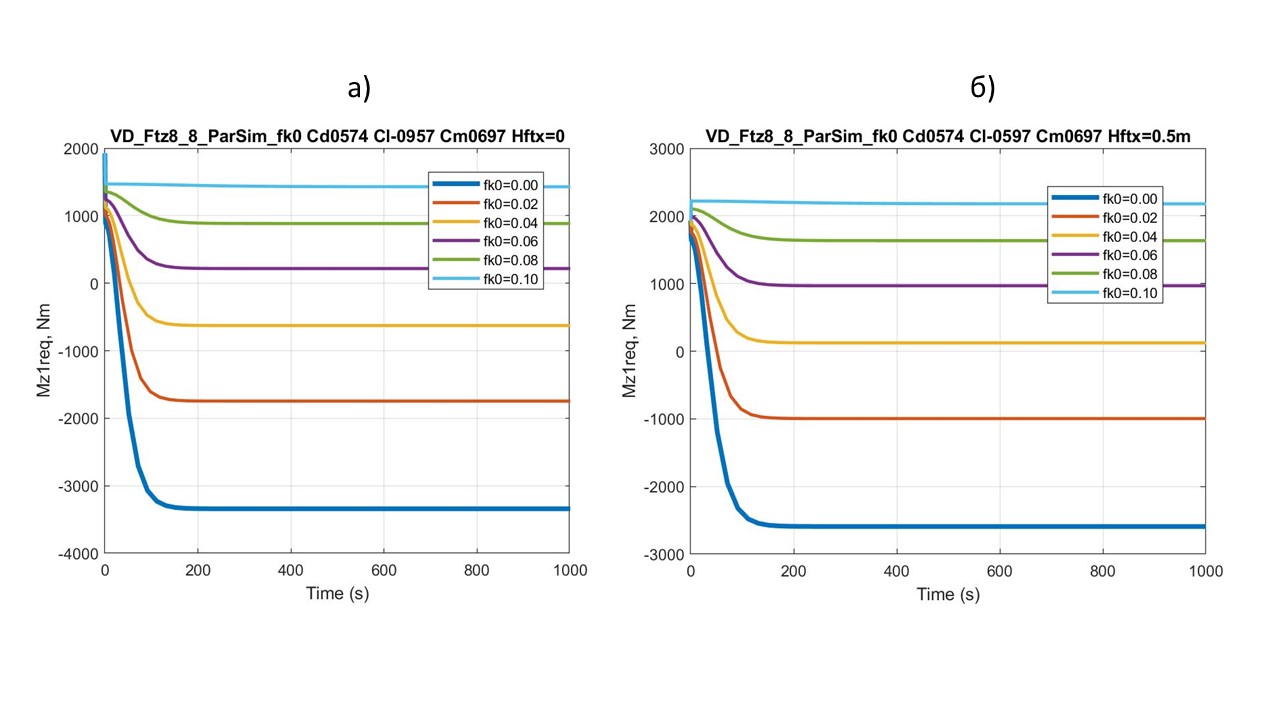
Рисунок 11 - Сравнительная картина зависимости ТСМ Mz1req в процессе разгона ТС с САС ((а) автомобиля-аналога и (б) квантомобиля) – от коэффициента fk0; аэродинамические коэффициенты: cd = 0,574; cl = –0,957; cm = 0,697
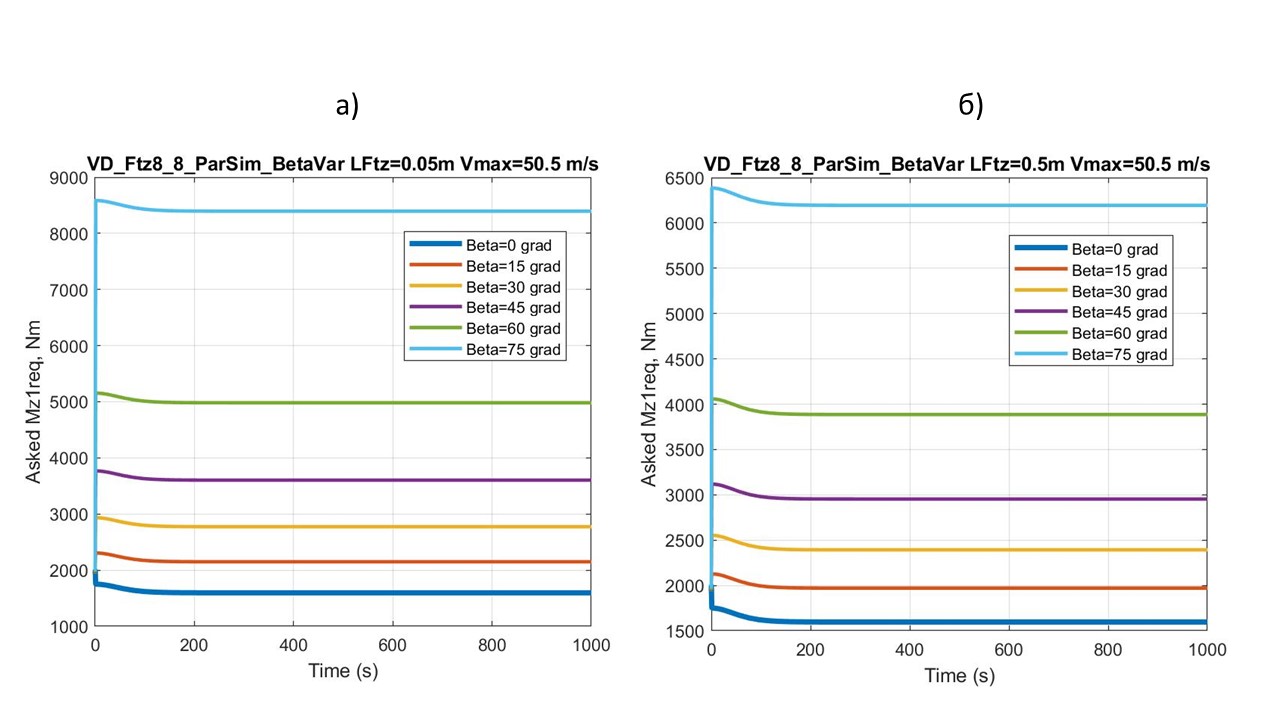
Рисунок 12 - Графики зависимости ТСМ Mz1req от угла наклона вектора траста β, в процессе разгона квантомобиля с выходом на крейсерскую скорость 50,5 м/с при fk0 = 0,02:
а) горизонтальная координата точки приложения траста LFtz = 0,05 м; б) точки приложения LFtz = 0,5 м
4. Обсуждение результатов ПИМ
Представленные результаты являются отражением действий автора по развитию концепции квантомобиля. Эта концепция возникла в трудах Леонова В.С. , , и, насколько известно, других вариантов развития концепции, кроме рассматриваемого здесь, пока нет. Поэтому уместно оценить достижения статьи с подключением идей предыдущих работ автора , , , .
В этих работах закладывались основы Simulink-моделирования движения квантомобиля, настраивались объекты-прототипы из числа существующих наземных ТС, главным образом модели КамАЗ-4326 . Это позволило развить S-модель до уровня, зафиксированного на рис. 4-5, и провести с её помощью расчетное исследование продольной устойчивости квантомобиля на представленном уровне.
Влияние коэффициента cm (см. рис. 8) на устойчивость – существенно. В диапазоне его варьирования от –0,1 до +0,15 размах изменений аэро-питч-момента у автомобиля составляет 850 Нм. Такой же размах будет и у квантомобиля, что для него более ущербно. Вполне понятно, что рост величины ТСМ Mz1req (в положительном направлении) связан с изменением аэро-питч-момента (и величины cm) в отрицательную сторону.
Значимость высоты действия траста (см. рис. 3) на устойчивость квантомобиля (см. рис. 9) оценим посредством количественного рассмотрения расчетного баланса моментов. Для автомобиля на стенде (Hftx = 0 м) ТСМ Для квантомобиля (Hftx = 0,5 м) ТСМ
В данном случае величина «клюющего» момента MFtx = 175 Нм по модулю составила примерно половину момента сил сопротивления воздуха MFw и десятую часть статического момента смещения центра тяжести экипажа относительно середины колесной базы MGqStat.
Заслуживает внимания сравнительная картина зависимости ТСМ Mz1req (автомобиля-аналога и квантомобиля) от значений коэффициента дорожного сопротивления качению колес fk0 (см. рис. 10). По сути, семейство кривых, характеризующих квантомобиль (рис. 10б), эквидистантно семейству кривых для автомобиля-аналога (рис. 10а). Оно всё смещено на величину ΔMz1req = FTx·HFTx = 1500Н·0,5м = 750 Нм. Объяснимо всё тем же «клюющим» моментом, создаваемым трастом КД. Размах значений ТСМ Mz1req в диапазоне значений fk0 0,0÷0,1 для обоих сравниваемых вариантов составляет ≈1000 Нм. Следует отметить, что зафиксированные на рис. 10 кривые разгона экипажей из-за различия значений fk0 при FTx = const заканчиваются разной конечной скоростью установившегося движения – более детализированный анализ топологии данных семейств отнесен автором на будущее.
Похожей оказалась и сравнительная картина зависимости ТСМ Mz1req в процессе разгона ТС с САС (автомобиля-аналога и квантомобиля) от значений коэффициента дорожного сопротивления fk0 (см. рис. 11). Семейство кривых, характеризующих квантомобиль (рис. 11б), топологически подобно семейству кривых для автомобиля-аналога (рис. 11а). Оно также всё смещено на свою величину ΔMz1req. Однако размах значений ТСМ Mz1req в диапазоне значений fk0 0,0÷0,1 для этих сравниваемых вариантов составляет ≈ 4800 Нм.
Таким образом, привнесение САС в конструкцию квантомобиля (нацеленное специально на создание максимально возможного прижатия экипажа к ОП за счет радикализации коэффициентов cd, cl, cm) привело к существенному изменению размаха возможных значений ТСМ Mz1req, что для устойчивости экипажа на разнообразии дорожных условий будет ущербным.
Зависимость ТСМ Mz1req от угла наклона вектора траста β (см. рис. 12) оказалась значимой. Анализ перемещения точки приложения траста вперед, к центру колесной базы (в примере c LFtz = 0,05 м до LFtz = 0,5 м) – позволил отметить, по крайней мере, два момента. Во-первых, это приводит к снижению ТСМ для всех углов β > 0° (особенно при больших углах – сравните 6200 Нм и 8300 Нм для β = 75°). Во-вторых, сужает размах значений ТСМ – сравните размах 6800 Нм для LFtz = 0,05 м и размах 4600 Нм для LFtz = 0,5 м.
Естественно, значения MFtz (а следовательно, и ТСМ при прочих равных параметрах) будут наименьшими при нахождении точки приложения траста в области центра колесной базы, но, при наличии противоречий компоновочного характера использование зависимостей типа представленных может явиться элементом соответствующих оптимизационных методик.
5. Заключение
Simulink-модель приземного движения квантомобиля (МПДК), созданная на базе рассмотрения схемы сил и моментов, действующих на квантомобиль, позволяет осуществлять проведение расчетных исследований как динамики продольного движения экипажа в дорожных условиях, так и имитации нагрузок в условиях аэродинамического стенда.
В целом, подтвердилась гипотеза: уровень и характер питч-момента квантомобиля отличается от такового для автомобиля. Он может быть значительным, иногда меняя направленность (относительно автомобильного варианта ТС) и требует его оперативной нейтрализации (минимизации).
На основе результатов ПИМ показана значимость проблемы обеспечения продольной устойчивости квантомобиля. Основными факторами, усугубляющими названую проблему, в сравнении с классическим автомобилем, являются возникновение и реализация тяговой силы над опорной поверхностью, что увеличивает опасность опрокидывания экипажа.
Для нейтрализации опрокидывающих моментов необходимы дополнительные вертикальные трастеры и другие средства, охватываемые единой системой управления с основным КД.
Основные средства управления аэродинамическим воздействием на экипаж: жесткие конструктивные элементы (обводы и оперение корпуса); выдвижное оперение; дополнительные стабилизирующих трастеры – как показали проведенные расчеты, способны существенно изменять питч-моменты квантомобиля, с увеличением зависимости их от дорожных условий.
Сформированные на базе программы МПДК методические положения оценки продольной устойчивости квантомобиля могут послужить основой расчетной оптимизации компоновок этого вида ТС, расположения силовых модулей (трастеров) и САС, задействования их в процессе движения.
Сформирована методика использования существующих материалов испытаний автомобилей-аналогов для прогнозирования устойчивости квантомобилей.
Расчеты в среде МПДК позволили преодолеть познавательную сложность отображения и количественной оценки параметров продольного движения гипотетического квантомобиля. МПДК можно рассматривать как важную компоненту структуры дальнейших исследований квантомобиля.