NUMERICAL STUDY OF THE MAGNETIC FIELD PARAMETERS OF MAGNETIC FLUID VIBRATION SENSORS
NUMERICAL STUDY OF THE MAGNETIC FIELD PARAMETERS OF MAGNETIC FLUID VIBRATION SENSORS

Abstract
Numerical studies have been carried out on the magnetic induction values for magnetic fluid vibration sensor designs with the sensing element positioned internally and externally.
Magnetic fluid vibration sensors with magnetic suspensions made from magnetic materials with different properties and geometric dimensions are examined.
Numerical research has yielded dependencies between the magnetic induction values in the magnetic suspension of a magnetic fluid vibration sensor — when using magnetic materials with different properties and dimensions — and the distance between the sensing element and the static permanent magnets. This will make it possible to select the dimensions of the permanent magnets in magnetohydrodynamic vibration sensors and their characteristics at the design stage.
1. Введение
В настоящее время для виброконтроля узлов машиностроения, энергетики, авиационного и судового оборудования применяют датчики, работа которых основана на различных принципах действия , . Магнитожидкостные датчики имеют более высокую чувствительность измерений по сравнению с традиционными типами датчиков, что позволяет повысить контроль параметров и надежность работы технических узлов и снизить время регистрации переходного процесса.
Магнитожидкостный датчик вибраций (МЖДВ) включает в себя магнитный подвес, состоящий из чувствительного элемента в форме кольцевого постоянного магнита и двух статических магнитов, расположенных соосно и намагниченных одноименными полюсами относительно полюсов чувствительного элемента. Между чувствительным элементом и корпусом МЖДВ находится магнитная жидкость (МЖ). Наличие магнитной жидкости позволяет обеспечить левитацию чувствительного элемента и минимальное трение при движении его в осевом направлении.
Актуальность работы связана с созданием магнитожидкостных датчиков вибраций с высокой чувствительностью и точностью для технического оборудования различного назначения. Отсюда вытекают задачи по проведению исследований параметров магнитного поля в магнитожидкостных датчиках вибраций.
2. Методы исследований
Численные исследования параметров магнитного поля МЖДВ проведены на конечно-элементных моделях, созданных в трёх интегрированных средах: FEMM, ELCUT и QuickField с учетом граничных условий Дирихле-Неймана. Использование нескольких программных сред позволяет оценить корректность проведённых расчётов. При проведении исследований изменялись характеристики постоянных магнитов и расстояние между чувствительным элементом и статическими постоянными магнитами. Исследования проведены для четырех типоразмеров кольцевых постоянных магнитов: 20×12×5, 15×10×4, 10×7×3, 5×3×2. Значения коэрцитивной силы этих магнитов следующие: Hc=540 кА/м, 716 кА/м и 800 кА/м.
3. Основная часть
Цель работы состояла в расчете параметров магнитного поля магнитного подвеса МЖДВ при изменении характеристик, размеров постоянных магнитов и расстояний между ними.
Отсюда вытекают основные задачи исследований по определению параметров магнитной индукции в магнитном подвесе датчика и разработке рекомендаций по выбору постоянных магнитов на этапе проектирования МЖДВ.
При анализе конструктивных схем датчиков , , можно выделить две основные схемы конструкций, одна из которых имеет разомкнутый магнитопровод, а другая — замкнутый магнитопровод. Наиболее широкое применение нашла схема с разомкнутым магнитопроводом. Существует два конструктивных варианта схем с разомкнутым магнитопроводом: в одном из них (рис. 1а) чувствительный элемент расположен внутри корпуса датчика , а в другом — с его внешней стороны (рис. 1б) .
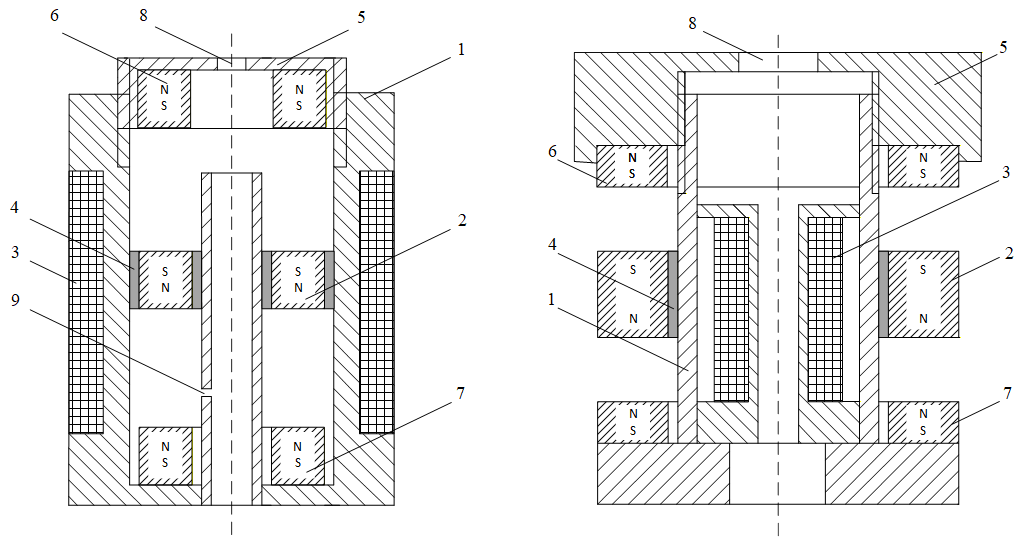
Конструкции магнитожидкостных датчиков вибраций:
а) с внутренним расположением чувствительного элемента; б) с внешним расположением чувствительного элемента
1 – немагнитный корпус; 2 – чувствительный элемент; 3 – измерительная обмотка; 4 – магнитная жидкость; 5 – торцевая крышка; 6, 7 – статические постоянные магниты; 8, 9 – сквозные отверстия
Статический постоянный магнит 7 фиксируется на немагнитном корпусе. Чувствительный элемент своими одноименными полюсами направлен к одноименным полюсам статических магнитов 6 и 7, что обеспечивает возникновение сил отталкивания между ними и препятствует их соприкосновению.
В качестве материалов магнитов выбраны высококоэрцитивные материалы из сплавов самарий-кобальт или неодим-железо-бор, которые обеспечивают высокие энергетические параметры магнитного подвеса датчика при его минимальных габаритах .
При выборе марки магнитной жидкости для магнитожидкостных датчиков вибраций необходимо соблюдать следующие требования: магнитная жидкость должна иметь низкую вязкость, обладать стабильностью своих физических свойств в магнитном поле и обеспечивать требуемый по условиям эксплуатации датчиков температурный диапазон. Таким требованиям соответствует МЖ марки Т40, изготовленная на основе керосина в соответствии с ТУ 49-2-3-85 в СКТБ «Полюс» .
При изменении расстояния между магнитами осуществляется регулировка чувствительности измерений. При уменьшении этого расстояния увеличивается сила отталкивания чувствительного элемента. Чувствительность измерений снижается, и регистрируемые величины находятся в области низкой частоты. Для повышения чувствительности измерений в диапазоне высоких частот увеличивается расстояние между чувствительным элементом и статическими магнитами.
Для повышения чувствительности измерений вибраций необходимо обеспечить равенство давлений в датчике. Это достигается выполнением отверстий 8 и 9.
Измерительным узлом датчика является магнитный подвес, в котором равновесие чувствительного элемента должны обеспечивать статические магниты за счёт равенства создаваемых ими сил отталкивания (рис. 2). Однако на чувствительный элемент действует и сила тяжести, которая совпадает по направлению с одной из сил отталкивания. Эти силы суммируются в направлении статического магнита 7, и чувствительный элемент смещается в его направлении. Величина зазора ∆2 становится меньше зазора ∆1. Это приводит к нарушению настроек датчика и вызывает появление погрешности измерений уровня вибраций , .
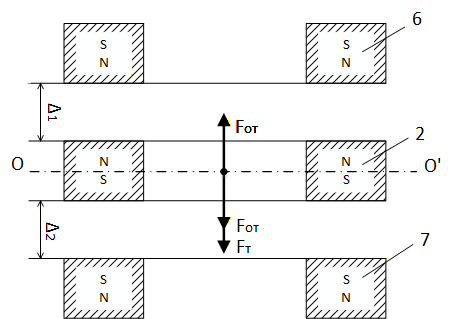
Силы, действующие на чувствительный элемент в магнитном подвесе
– увеличения площади статического кольцевого постоянного магнита, установленного на основании датчика;
– выбор кольцевого постоянного магнита, расположенного на основании датчика, с более высокими значениями энергетических параметров по сравнению с постоянным магнитом, установленным в торцевой крышке.
Для определения соотношений между размерами верхнего и нижнего постоянных магнитов магнитного подвеса в средах ELCUT, FEMM и QuickField проведены численные исследования распределения магнитной индукции в магнитном подвесе МЖДВ . Получены значения средней магнитной индукции в зазорах ∆1 и ∆2.
4. Результаты численных исследований магнитной индукции магнитожидкостного подвеса
На рисунках 3, 4, 5, 6 приведены расчетные графики средних значений магнитной индукции в магнитожидкостных датчиках с различными геометрическими размерами магнитного подвеса при изменении коэрцитивной силы постоянных магнитов. Результаты расчетов магнитной индукции при использовании сред QuickField, ELCUT и FEMM имеют отличия, которые составляют 1,5–2,0%. Погрешность расчетных результатов по сравнению с экспериментальными составляет 5–8%. Число конечных элементов для каждого варианта расчета составляло 158000–159000.
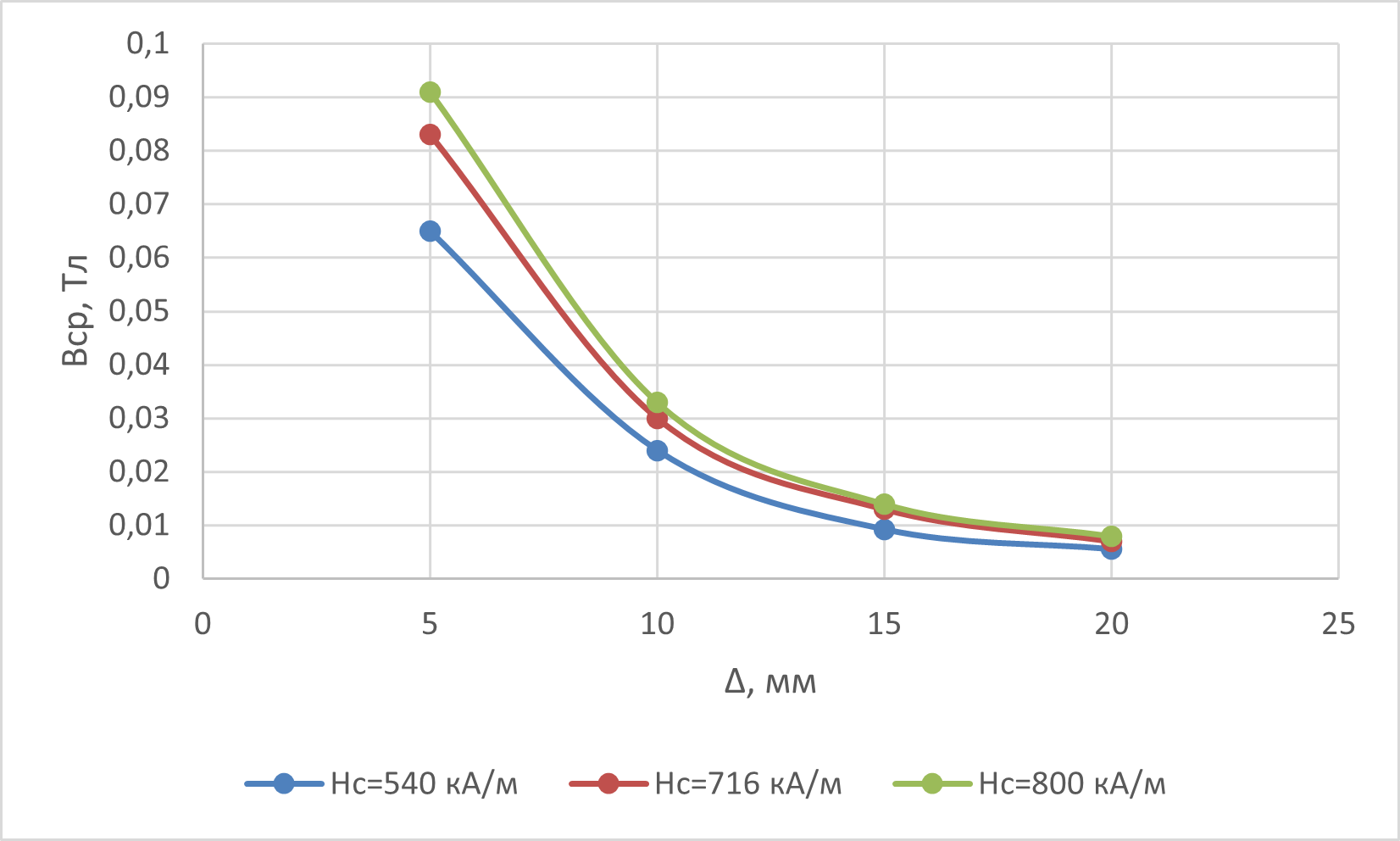
Рисунок 3 - Зависимость средней магнитной индукции от расстояния между чувствительным элементом и постоянными статическими магнитами с размерами 20×12×5 при различных значениях коэрцитивной силы
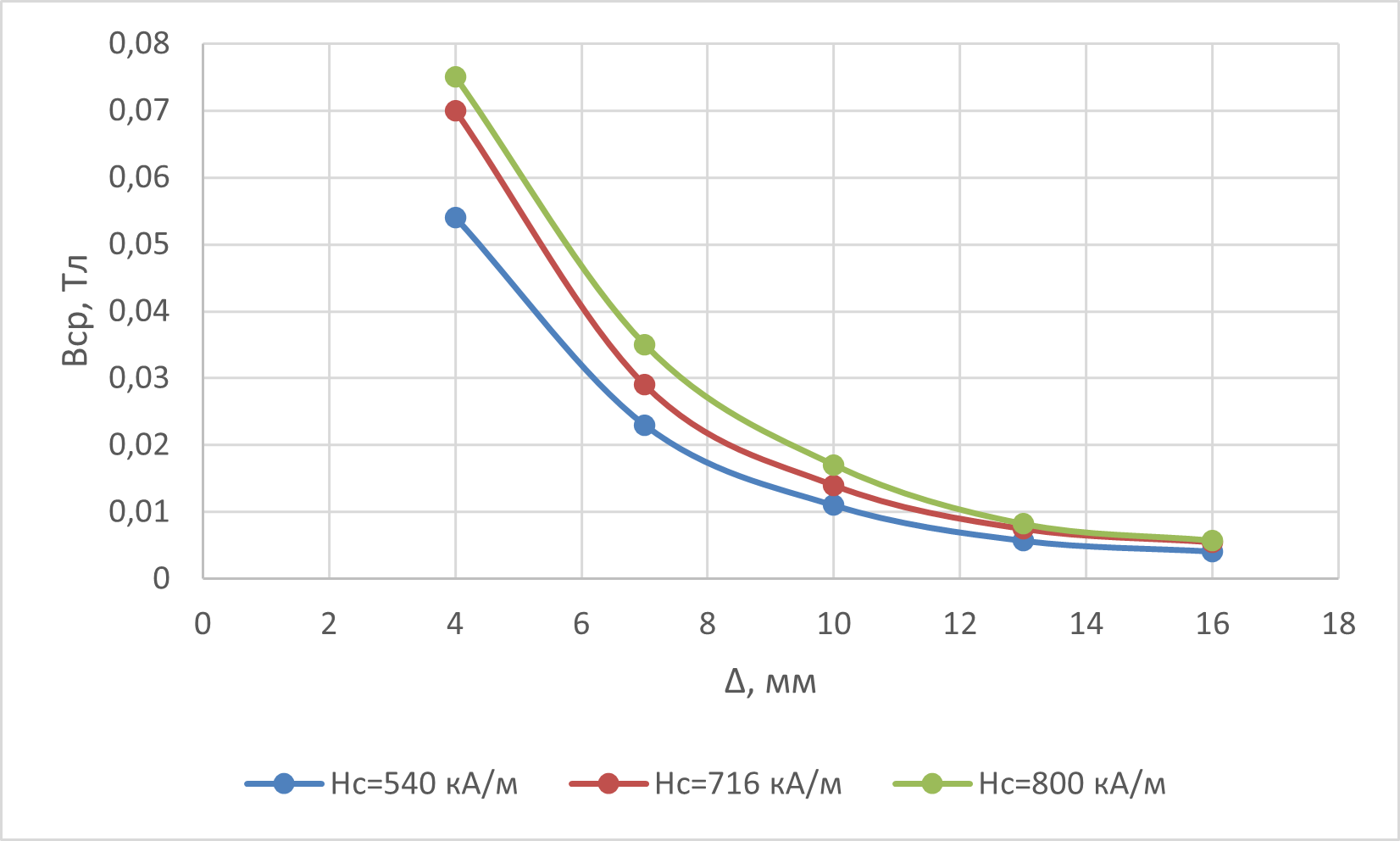
Рисунок 4 - Зависимость средней магнитной индукции от расстояния между чувствительным элементом и постоянными статическими магнитами с размерами 15×10×4 при различных значениях коэрцитивной силы
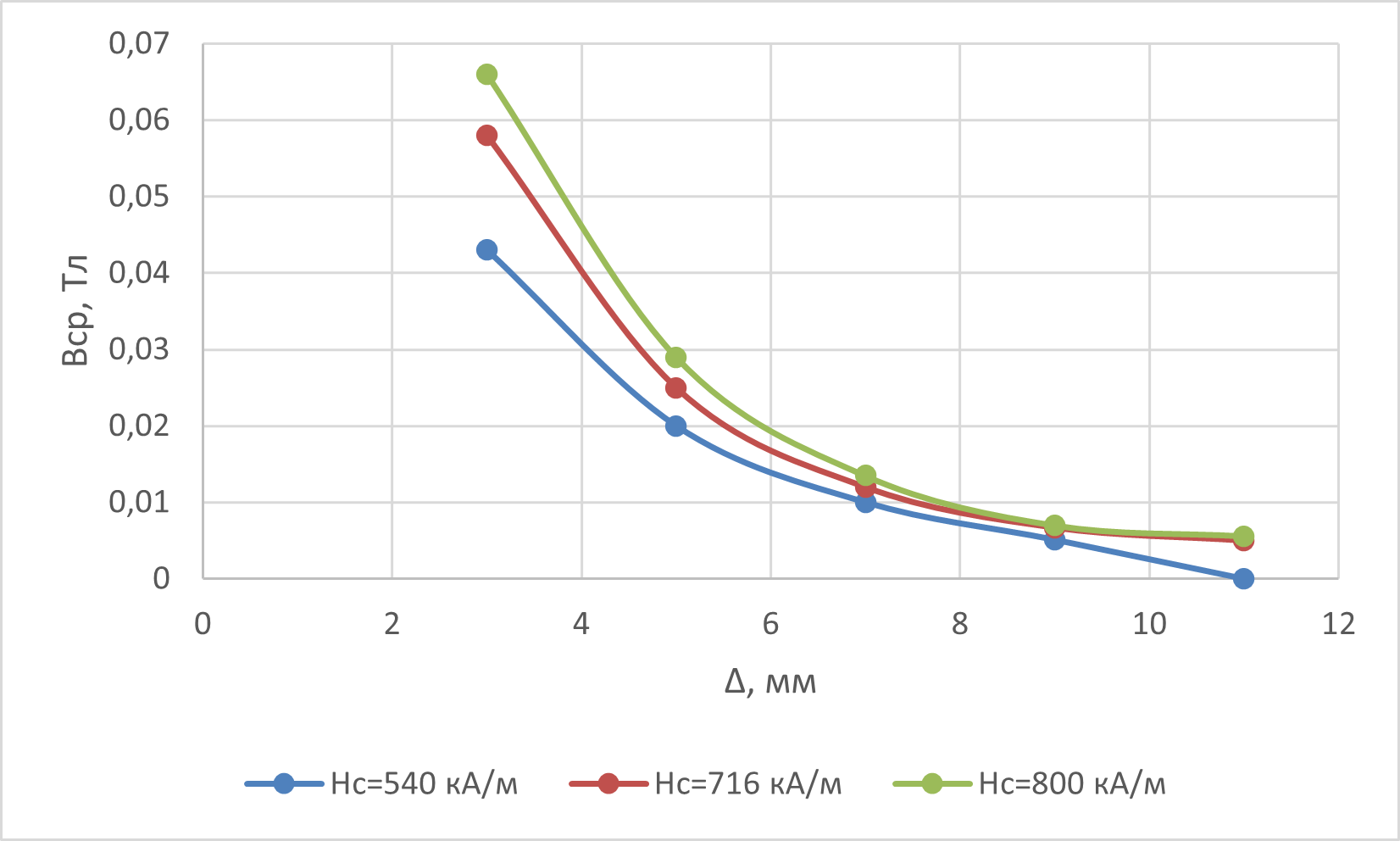
Рисунок 5 - Зависимость средней магнитной индукции от расстояния между чувствительным элементом и постоянными статическими магнитами с размерами 10×7×3 при различных значениях коэрцитивной силы
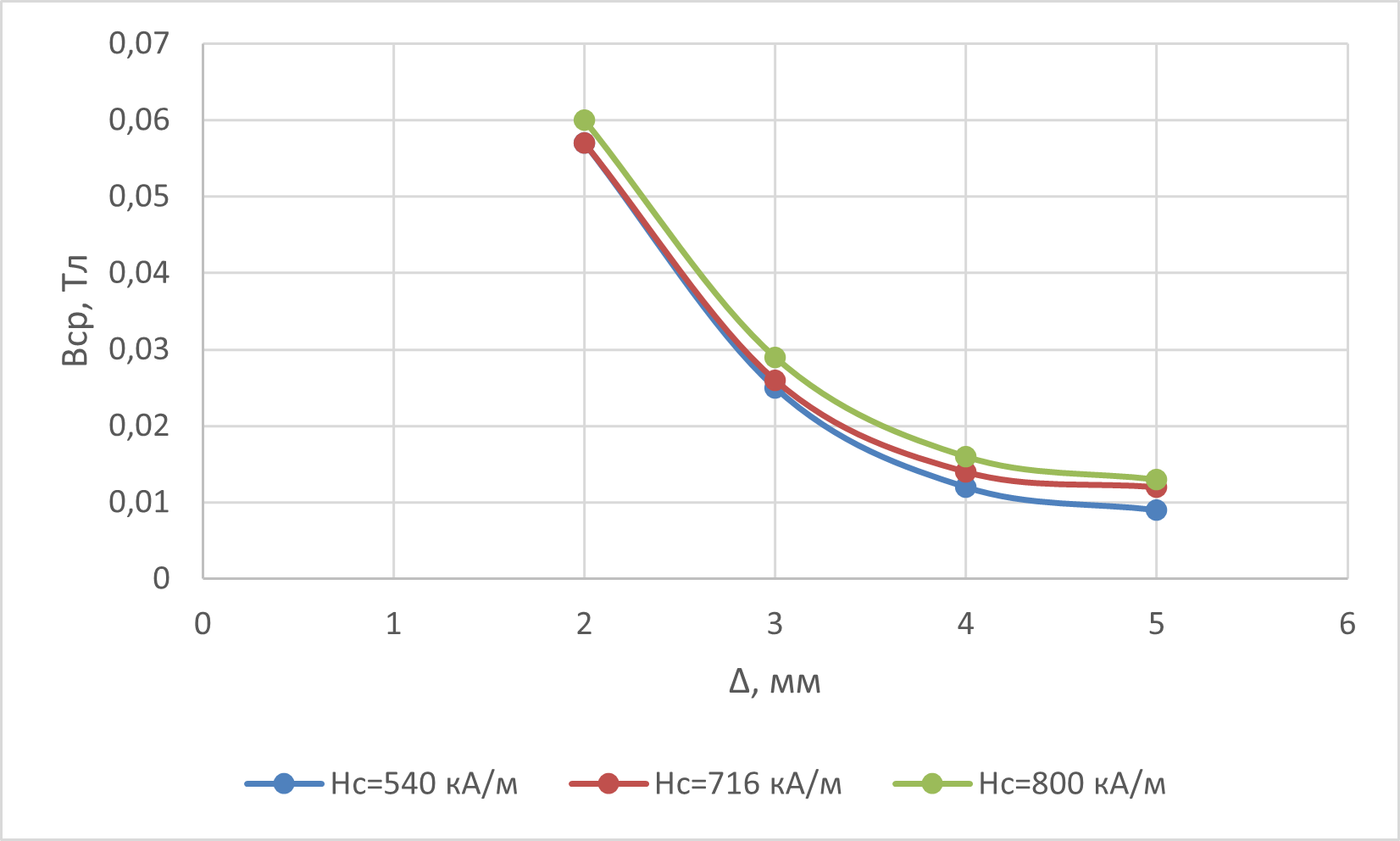
Рисунок 6 - Зависимость средней магнитной индукции от расстояния между чувствительным элементом и постоянными статическими магнитами с размерами 5×3×2 при различных значениях коэрцитивной силы
Компенсировать силу тяжести чувствительного элемента можно также за счет увеличения коэрцитивной силы нижнего магнита магнитного подвеса на 17–23%. Это достигается выбором нижнего постоянного магнита, имеющего группу по магнитным свойствам на две единицы выше, чем у верхнего магнита магнитного подвеса.
5. Заключение
На основании численных исследований разработаны рекомендации для выбора постоянных магнитов магнитного подвеса магнитожидкостных датчиков вибраций. Полученные результаты могут быть использованы при создании систем диагностики и мониторинга уровня вибраций технических объектов.
Основные результаты работы состоят в следующем:
– проведён анализ результатов расчёта магнитной индукции в магнитожидкостном датчике вибраций при использовании сред FEMM, ELCUT и QuickField. Полученные результаты отличаются на 1,5–2,0%. Расчётные результаты отличаются от результатов экспериментов в пределах 5–8%, что позволяет использовать полученные рекомендации при проектировании новых магнитожидкостных датчиков вибраций.
– найдены основные соотношения между размерами статических постоянных магнитов магнитного подвеса магнитожидкостных датчиков вибраций, что обеспечивает требуемую точность измерений вибраций технологического и энергетического оборудования;
– выполнены расчётные исследования, и получены соотношения между магнитными характеристиками статических магнитов магнитного подвеса: нижний статический магнит должен иметь значения коэрцитивной силы на 17–23% выше, чем верхний статический магнит.
– из результатов численных исследований в интегрированных средах FEMM, ELCUT и QuickField найдены значения магнитной индукции в зазорах ∆1 и ∆2, которые составляют 0,005–0,095 Тл при изменении величины зазора.
– на основании анализа свойств магнитных жидкостей даны рекомендации по выбору магнитной жидкости марки Т40, изготовленной на основе керосина в соответствии с ТУ 49-2-3-85 в СКТБ «Полюс». Рабочий температурный диапазон этой магнитной жидкости составляет ± 50°C.