МОДЕЛИРОВАНИЕ И Автоматизация процесса плавки медно-никелевого сульфидного сырья
МОДЕЛИРОВАНИЕ И Автоматизация процесса плавки медно-никелевого сульфидного сырья
Аннотация
Работа посвящена повышению технико-экономических показателей процесса плавки медно-никелевого сульфидного сырья в печи Ванюкова. В качестве целевого параметра выбрана температура плавки, обеспечивающая наилучшее протекание физико-химических реакций процесса. Разработана модель процесса Ванюкова на основе уравнений теплового баланса. Описаны статьи прихода и расхода тепла. Адекватность математической модели оценена величиной отклонения рассчитанной температуры плавки от номинального значения. Рассмотрены варианты управления температурой плавки на основе ПИ и ПИД регуляторов. Оценены показатели качества работы системы. Разработана SCADA-система, осуществляющая сбор информации и управление режимом плавки медно-никелевых материалов в печи Ванюкова.
1. Введение
Востребованность высококачественных цветных металлов растет с каждым годом. В связи с этим требования к производству цветных металлов в современных условиях ужесточаются с точки зрения культуры труда, экономических и экологических аспектов [1], [2].
Печь Ванюкова – особая технологическая установка отечественного производства, которая является важнейшим звеном получения меди. Характерной особенностью установки служит ее высокая удельная производительность и непрерывная работа. При этом должен поддерживаться заданный тепловой режим при непрерывном контроле объемов загруженной шихты и подаваемого дутья. Даже кратковременные неисправности печи могут привести к повторному окислению расплава, увеличению его вязкости и выбросу из печи [3], [4], [5].
Целью работы является стабилизация температуры плавки на требуемом уровне, при котором обеспечивается наилучшее протекание физико-химических реакций процесса.
2. Моделирование процесса плавки
Технологический расчет плавки медно-никелевого сырья в печи Ванюкова включает в себя расчет материального и теплового баланса [1], [2], [6]. В соответствии с законом сохранения энергии основное уравнение теплового баланса имеет вид:
Статьями прихода являются: теплота вносимая шихтой с флюсом, теплота химических реакций, теплота технического кислорода и воздуха, статьями расхода являются: количество теплоты уносимой со шлаком, штейном, отходящими газами, тепло, затрачиваемое на испарение влаги и прочие потери [1], [5]. Таким образом, уравнение теплового баланса принимает вид:
В упрощенной форме уравнение можно записать в виде статического теплового баланса, учитывая, что М – масса шлако-штейновой ванны, с – теплоемкость штейна при температуре 1250°С, Т – контролируемая температура:
Формулы для расчетов статей баланса представлены в таблице 1.
Таблица 1 - Формулы для расчета статей баланса
Наименование величины | Формулы |
М – масса шлако-штейновой ваннны | М=148 т |
с – теплопроводность штейна | с=64,86 кДж/т*К |
Статьи прихода тепла | |
|
|
|
|
| q=11879,79 кДж/кг*К усредненный тепловой эффект реакций n=0,97 степень усвоения кислородом дутья Gdyt =37150 м3/ч расход дутья O2vd =57,59*0,01 содержание кислорода в дутье по объему |
|
|
Статьи расхода тепла | |
| i, j – этантальпии шлака и штейна соответственно i = 960 кДж/кг, j = 1460 кДж/кг
|
| |
|
Т – контролируемая температура, К |
|
|
По указанным формулам в Simulink Matlab была собрана балансовая модель процесса Ванюкова. Целевым параметром выбрана температура плавки, так как именно при поддержании температуры в заданных пределах обеспечивается требуемое технологией протекание физико-химических процессов в печи.
Для оценки адекватности модели был проведен численный эксперимент: входные потоки задавались с учетом рандомизации в пределах регламентных значений, при этом оценивалось значение температуры плавки. Рассчитанное по модели значение температуры сравнивалось с номинальным. Гистограмма отклонений расчетного значения температуры от номинального приведена на рисунке 1 (высота столбца – количество ситуаций, всего проведено 100 экспериментов).
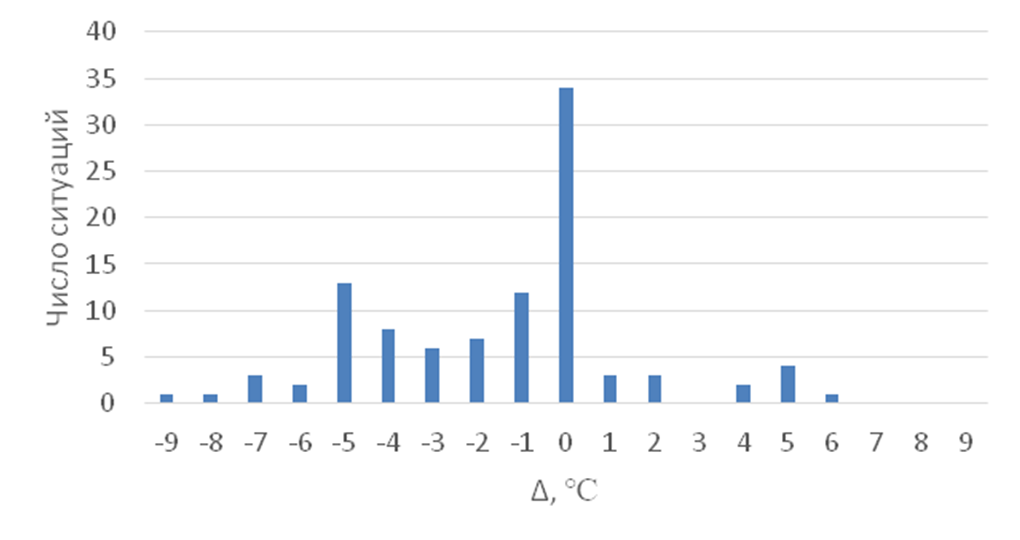
Рисунок 1 - Проверка адекватности модели
Согласно рисунку 1, ошибка моделирования не превосходит ±10°С при номинальном значении температуры 1250°С. Таким образом, модель признается адекватной.
3. Управление температурой плавки
Для управления температурой плавки медно-никелевого сырья в печи Ванюкова были рассмотрены ПИ и ПИД регуляторы.
Графики переходных процессов при различных возмущениях, поданных на систему, показаны на рисунке 2.
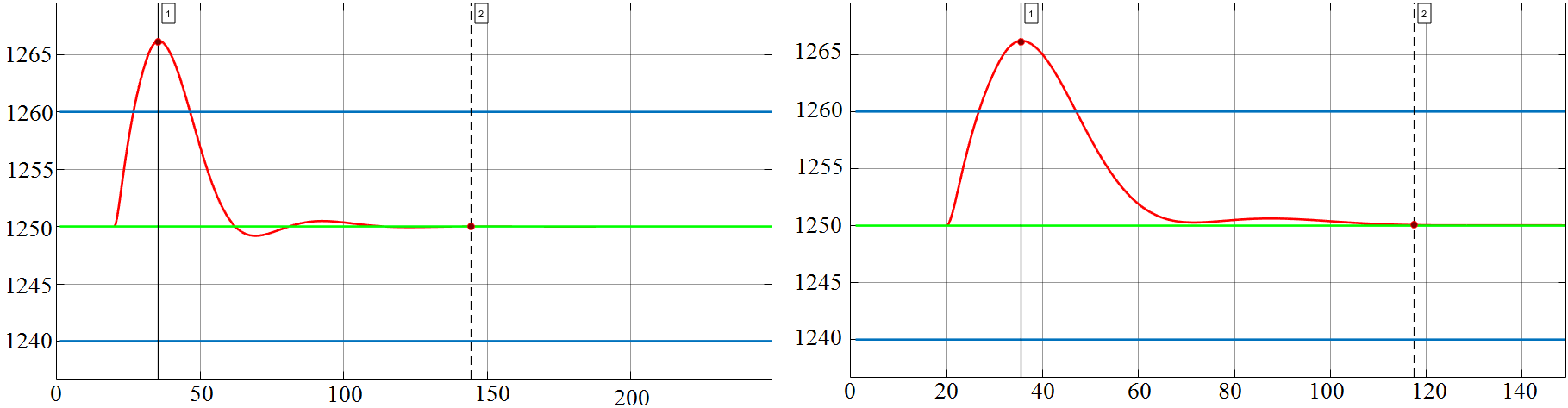
Рисунок 2 - Реакция системы на возмущение по управляющему параметру
Примечание: зеленый – номинальное значение температуры; синий – диапазон регламентных значений температуры; красный – реакция системы на возмущающие воздействия; слева – работа ПИ-регулятора; справа – работа ПИД-регулятора
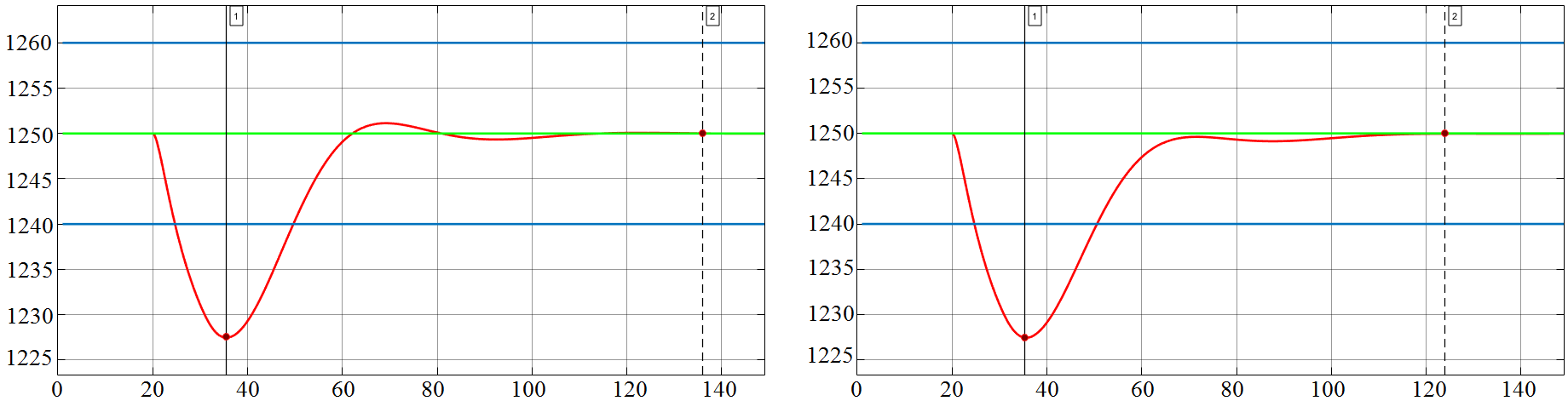
Рисунок 3 - Реакция системы на возмущение по возмущающему параметру
Примечание: зеленый – номинальное значение температуры; синий – диапазон регламентных значений температуры; красный – реакция системы на возмущающие воздействия; слева – работа ПИ-регулятора; справа – работа ПИД-регулятора
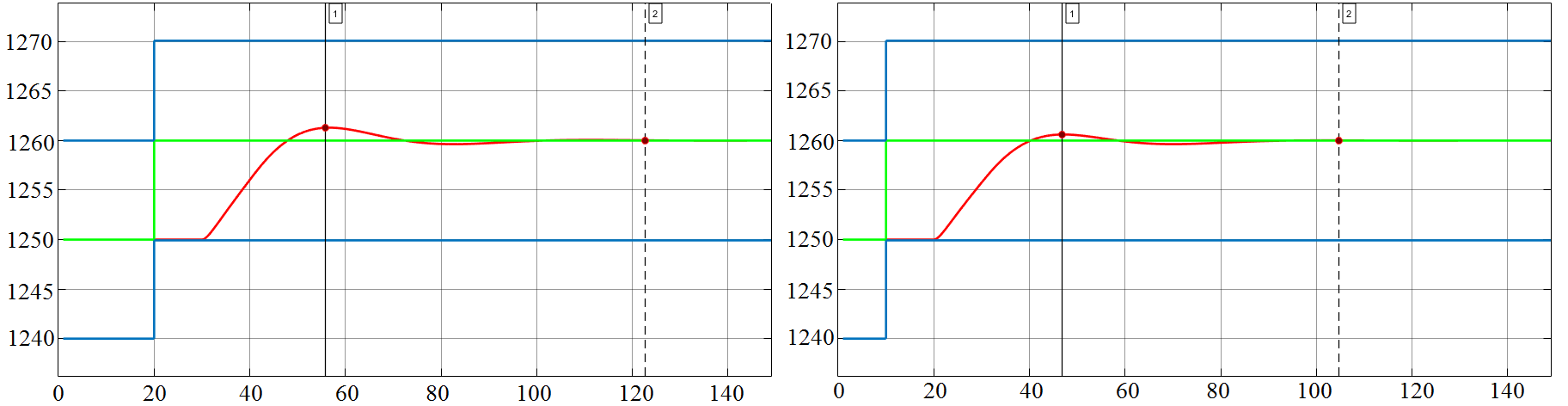
Рисунок 4 - Реакция системы на изменение уставки
Примечание: зеленый – номинальное значение температуры; синий – диапазон регламентных значений температуры; красный – реакция системы на возмущающие воздействия; слева – работа ПИ-регулятора; справа – работа ПИД-регулятора
По полученным графикам (рис. 2) были определены показатели качества системы управления объектом. Сравнение показателей работы системы с ПИ и ПИД-регулятором приведено в таблице 2.
Таблица 2 - Сравнение показателей переходного процесса системы с ПИ и ПИД-регулятором
Характеристика | ПИ-регулятор | ПИД-регулятор |
Возмущение по управляющему параметру | ||
Время выхода системы на установившее значение (время регулирования) | 124 | 97 |
Статическая ошибка | 0 | 0 |
Перерегулирование, % | 1,28 | 1,28 |
Возмущение по возмущающему параметру | ||
Время выхода системы на установившее значение (время регулирования) | 115 | 103 |
Статическая ошибка | 0 | 0 |
Перерегулирование, % | 1,76 | 1,84 |
Изменение уставки | ||
Время выхода системы на установившее значение (время регулирования) | 103 | 84 |
Статическая ошибка | 0 | 0 |
Перерегулирование, % | 0,07 | 0,07 |
Основной показатель, характеризующий работу системы – это время регулирования, то есть, то время, за которое система, вышедшая из равновесия, вернется в устойчивое состояние. Меньшее время регулирования показывает ПИД-регулятор, поэтому для дальнейшей работы выбран он.
4. Настройка клиент-серверной архитектуры
На производстве для измерения параметров используется большое количество датчиков, генерирующих различные сигналы. Все сигналы поступают на один или несколько контроллеров, которые в свою очередь передают данные в SCADA-систему [7], [8].
Основными функциями SCADA-системы является сбор информации и управление технологическим процессом путем выработки управленческих сигналов. Также SCADA-системы предоставляют графическое описание хода технологического процесса в форме, удобной для оператора (операторский экран), регистрируют события, которые произошли за все время работы, архивируют их и формируют отчеты на основе архивных данных [9], [10].
Для связи датчиков со SCADA-системой используются различные технологии. Так, наиболее часто используется OPC-технология, которая определяет единый интерфейс передачи данных между объектами. Данная технология использует клиент-серверную архитектуру, то есть в сети есть OPC-клиент, который передает данные, и OPC-сервер, обрабатывающий полученные данные и хранящий их. Главным преимуществом такой архитектуры является то, что при замене сервера, клиент продолжает работать в штатном режиме и не требует перенастройки либо замены, так как интерфейс передачи данных между ними подходит для большинства производителей аппаратуры.
Операторский экран или мнемосхема – наглядное изображение технологической цепочки агрегатов, несущее в себе достаточную информацию для наблюдения за процессом. На экране могут быть изображены агрегаты, сигналы с датчиков, графики, журнал тревог и так далее.
В статье рассматривается разработка экрана в SCADA-пакете IFIX. Был нарисован экран оператора, настроена база данных (созданы локальные теги (переменные) и связанных с имеющимися сигналами с датчиков). IFIX имеет множество встроенных библиотек с готовыми фигурами, есть анимированные изображения. Анимация привязывается к тегам, которые были ранее созданы в базе данных.
Вид разработанного экрана оператора представлен на рисунке 3.
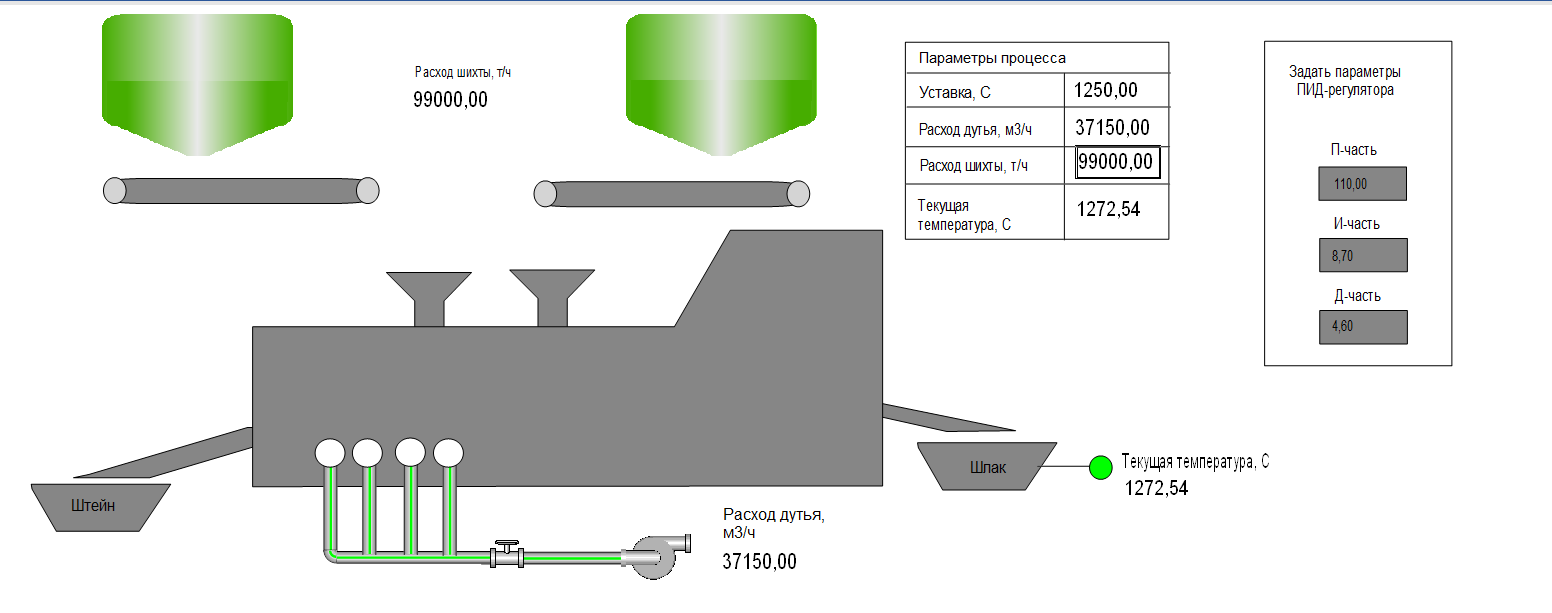
Рисунок 5 - Экран оператора
На рисунке 3 представлены конвейеры и бункеры, которые отвечают за подачу шихтового материала, трубы подачи кислородно-воздушной смеси, контролируемые параметры. Также настроена анимация – при изменении параметра мигает объект, который за него «отвечает». Например, при увеличении количества подачи шихты в печь, бункеры меняют цвет с серого на зеленый, а при увеличении подачи дутья – трубы.
5. Заключение
Таким образом, была разработана математическая модель процесса плавки медно-никелевого сырья в печи Ванюкова. На основе уравнений теплового баланса найдена зависимость температуры плавки от параметров процесса. Показана адекватность математической модели.
Проанализирована работа ПИ и ПИД регуляторов для управления температурой плавки. Показано, что работа ПИД регулятора позволяет более качественно управлять температурой плавки.
Разработана SCADA-система, осуществляющая сбор информации и управление режимом плавки медно-никелевых материалов в печи Ванюкова.