МОДЕЛИРОВАНИЕ ВЗАИМОДЕЙСТВИЯ ДВИЖИТЕЛЕЙ С ПОЧВОЙ МЕТОДОМ ДИСКРЕТНЫХ ЭЛЕМЕНТОВ В ПРОГРАММЕ ROCKY DEM
МОДЕЛИРОВАНИЕ ВЗАИМОДЕЙСТВИЯ ДВИЖИТЕЛЕЙ С ПОЧВОЙ МЕТОДОМ ДИСКРЕТНЫХ ЭЛЕМЕНТОВ В ПРОГРАММЕ ROCKY DEM
Аннотация
В статье приведен анализ современных моделей взаимодействия движителей машин с почвой. А также представлены результаты разработки модели взаимодействия колеса с почвой на основе метода дискретных элементов в программе Rocky DEM. Для моделирования взаимодействия колеса с почвой принята модель контакта Герца-Миндлина. При использовании контактной модели Герца-Миндлина основными физико-механическими параметрами, описывающими реологическое поведение моделируемой среды, являются коэффициент Пуассона, коэффициенты статического и динамического трения, модуля Юнга, поверхностная энергия, диаметр и форма моделируемых дискретных элементов. Полученные результаты можно использовать при энергетической оценке и оптимизации конструктивно-технологических параметров движителей тракторов и сельскохозяйственной техники. Предложенная методика позволяет повысить разработки конструкций новых движителей и постановки их на производство.
1. Введение
На современном этапе развития механизации сельскохозяйственного производства наиболее существенным резервом является повышение продуктивности полей за счет своевременного выполнения работ на базе высокопроизводительной техники и снижения воздействия их движителей на почву , , , .
Совершенствование движителей является основным способом снижения вредного воздействия их на почву, а также улучшения тягово-сцепных показателей. Вопросы взаимодействия движителей с почвой и обоснования рациональных параметров освещены в работах А.С. Антонова, Е.Д. Львова, Н.А. Забавникова, М.Г. Беккера, Дж. Вонга, М.И. Медведева, Е.М. Харитончика, В.В. Гуськова, А.В. Васильева, Е.Н. Докучаевой, О.Л. Уткин-Любовцова, М.И. Ляско, И.П. Ксеневича, В.А. Скотникова, Б.Н. Пинигина, Б.М. Куликова, Д.И. Золотаревской и многих других ученых.
Определение способов радикального снижения уплотнения почвы МТА возможно на основе углубленного изучения взаимодействия движителей с почвой, в результате которого можно разработать математические модели процессов и рекомендации для решения поставленных задач.
При теоретическом обосновании параметров движителей тракторов и сельскохозяйственной техники используются различные методы моделирования, которые можно классифицировать по методам численной реализации и применяемых компьютерных программ.
Целью работы является анализ моделей, используемых для моделирования взаимодействия движителей с почвой методом дискретных элементов и разработка методики моделирования взаимодействия колеса с почвой в программе Rocky DEM.
2. Методы и принципы исследования
Технический обзор литературы и информации по контактным моделям. Программа Rocky DEM для моделирования динамики сыпучих сред со сложной геометрией частиц методом дискретных элементов (DEM). Rocky DEM отличается аналогичных программных продуктов следующими функциями: несферические формы частиц, мульти-GPU вычисления, расчет разрушения частиц без потери массы или объема и визуализация поверхностного износа. В результате интеграции Rocky DEM и Ansys Workbench расчет и моделирование взаимодействия частиц можно выполнять с учетом аспектов механики деформируемого твердого тела, вычислительной гидрогазодинамики и теплообмена. Также при использовании Ansys Workbench можно выполнять многофазные эксперименты.
3. Результаты и обсуждение
В зависимости от методов численной реализации моделей взаимодействия движителей с почвой их можно подразделить на три основных вида: модели с использованием метода вычислительной гидродинамики (CFD-метод), модели с использованием метода конечных элементов (FEM-метод) и модели с использованием метода дискретных элементов (DEM-МДЭ) , , , .
В настоящее время перспективным для моделирования взаимодействия движителей с почвой является метод дискретных элементов. МДЭ – это численный метод, предназначенный для расчёта движения большого количества частиц, таких как молекулы, песчинки, гравий, галька и прочих гранулированных сред. Метод был первоначально применён Cundall в 1971 году для решения задач механики горных пород . В МДЭ используются модели гистерезисной линейной пружины, жидкого моста, контактной жесткости, скольжения, склеивания, демпфированные упругие модели, линейная (Cundall) контактная модель, контактна модель Герца-Миндлина и Дересевича и ее вариантов, а также различные сочетание данных моделей (табл.1) , , , .
В МДЭ дискретный материал образуется из отдельных N упругих частиц сферической формы радиусом Ri. Движение каждой i-го элемента (частицы) определяется координатами центра его тяжести xi и углом поворота θi вокруг центра тяжести как целого элемента .
Система уравнений движения для каждой частицы при МДЭ
где, t – время, с; mi – масса частицы, кг; Ii – момент инерции, кг·м2.
Вектор Fi определяются как сумма сил, действующих на контактах i-й и j-й частиц (включая силу тяжести):
Вектор Mi возникает как момент сил Fij относительно центра i-й частицы:
Поверхностные силы Fijсостоят из сил трения Ft,ij и отталкивания Fn,ij. Для их определения используются различные контактные модели соударения. Сила отталкивания возникает между частицами при условии δij > 0 (рис. 1) и направлена по нормали nij в направлении центра i-й частицы (рис. 2). Для ее определения выберем вязкоупругою модель соударения :
Fn,ije – упругая составляющая, Н; Fn,ijv – вязкая составляющая, Н.
Упругая часть силы в соответствии Дж. Герцу
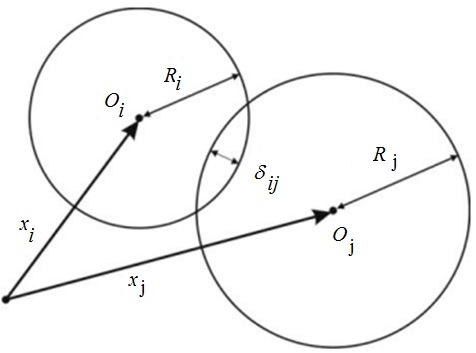
Рисунок 1 - Геометрия модели контактного взаимодействия частиц
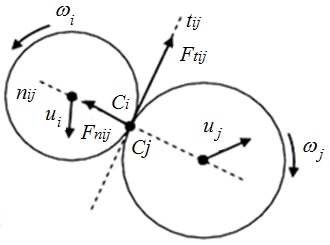
Рисунок 2 - Силы, действующие при контактном взаимодействии частиц
где Mij – приведенная масса частиц, кг; un,ij – проекция относительной скорости точки соударения на ось nij, м/с; γn – коэффициент демпфирования, оказывающий основное влияние на коэффициент восстановления скорости после удара .
Сила трения Ft,ijнаправлена против движения i-й частицы относительно j-й, а ее величина определяется:
где ut,ij – проекция скорости точки контакта Ci относительно скорости точки Cj на ось tij, м/с; φt – угол контактного трения между частицами, рад.
Следовательно, система дифференциальных уравнений второго порядка (1) относительно неизвестных xi, θj полностью определяет (3)-(7) движение и соударение совокупности моделируемых частиц.
На основе анализа существующих моделей контакта дискретных элементов, мы пришли к выводу, что для моделирования почвенной среды как вязко-упруго-пластического деформируемого тела наиболее подходящими являются модели контакта Герца-Миндлина: – модель и теория скользящего контакта Герца-Миндлина (без проскальзывания); – модель Герца-Миндлина с адгезией связывающих частиц; – модель когезионного контакта Герца-МиндлинаJKR (Johnson-Kendall-Roberts).
Модель когезионного контакта Герца-Миндлина JKR (Johnson-KendallRoberts) учитывает влияние сил Ван-дер-Ваальса в зоне контакта и позволяет моделировать прочно адгезивные системы (сухие или влажные материалы). В этой модели реализация нормальной упругой контактной силы основана на теории Джонсона-Кендалла-Робертса, изложенной в (Johnson, KendalandRoberts 1971).
Таблица 1 - Контактные модели метода дискретных элементов
где E* – эквивалентный модуль Юнга, Па; R* - эквивалентный радиус, м; δn – нормальное перекрытие, м; Ea, va, Ra и Eb, vb и Rb – модуль Юнга, Па; коэффициент Пуассона и радиус контактных сфер, м.
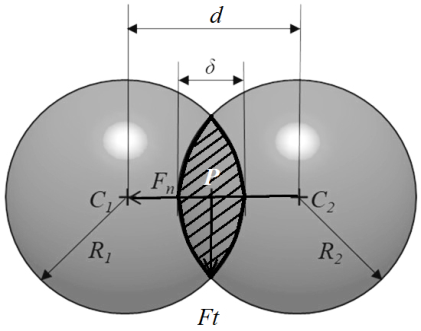
Рисунок 3 - Расчетная схема взаимодействия частиц по модели Герца-Миндлина JKR
где
где St – жесткость на сдвиг, Па; δt – тангенциальное перекрытие, м; G* – эквивалентный модуль сдвига, Па.
Нормальное перекрытие двух контактирующих частиц:
где
xA,i и xB,i – координаты центров A и B единиц частицы, соответственно, м; d – расстояние между центрами двух частиц, м.
Коэффициенты нормальной kn и тангенциальной ks жесткости двух контактирующих частиц определяются:
Контактная жесткость между двумя частицами моделируется как набор упругих пружин с постоянной нормалью и жесткостью на сдвиг в точке контакта. Параллельная связь заменяет сцепление между комками почвы.
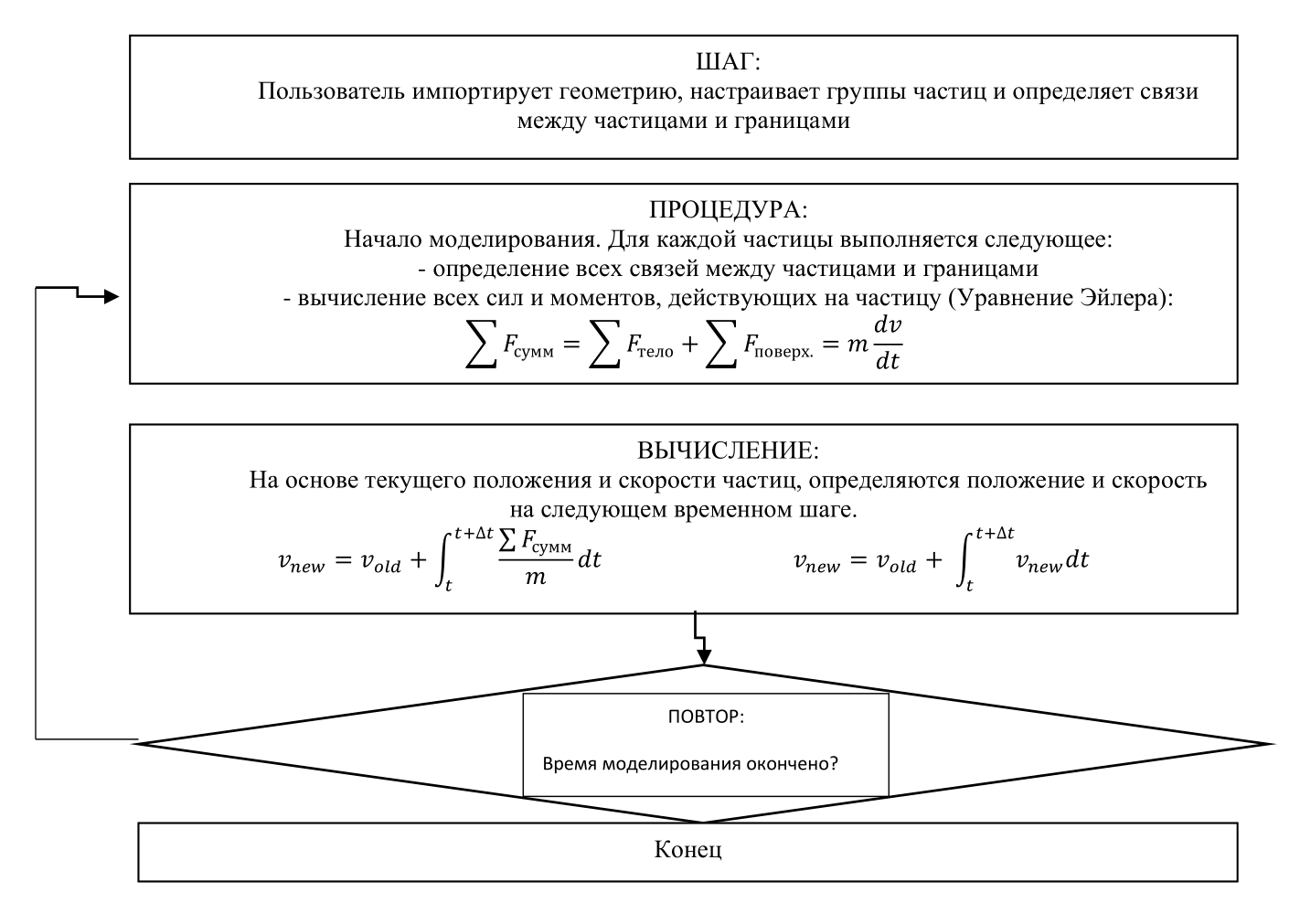
Рисунок 4 - Алгоритм численной реализации модели почвенной среды в программе Rocky DEM
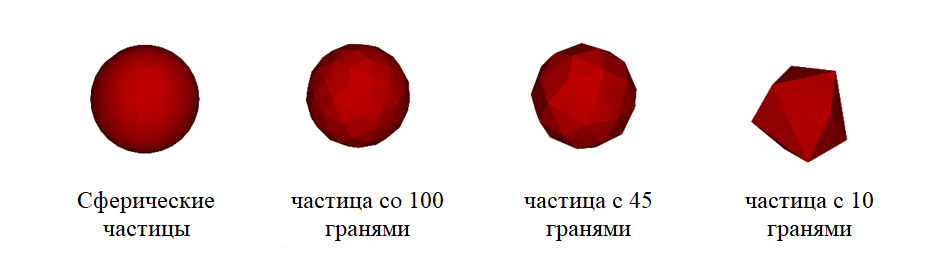
Рисунок 5 - Модельное представление форм частиц в программе Rocky DEM
Нами разработана модель взаимодействия колесных движителей с почвой на основе метода дискретных элементов.
Численная реализация разработанной модели почвенной среды производилась в лицензионной компьютерной программе Rocky DEM. Поэтапная реализация компьютерной модели включает в себя следующие шаги (рис. 6):
- проектирование трехмерных твердотельных моделей колеса тракторов и сельскохозяйственной техники и почвенного канала в системе проектирования КОМПАС 3D;
- импорт геометрий трехмерных твердотельных моделей, настройка группы частиц и определение связи между частицами и границами;
- процедура расчета при которой для каждой частицы определяются все связей между частицами и границами, вычисляются все силы и моменты, действующие на частицы;
- процесс вычисления при котором на основе текущего положения и скорости частицы, определяется скорость и положение на следующем временном шаге;
- окончание расчета и анализ полученных результатов.
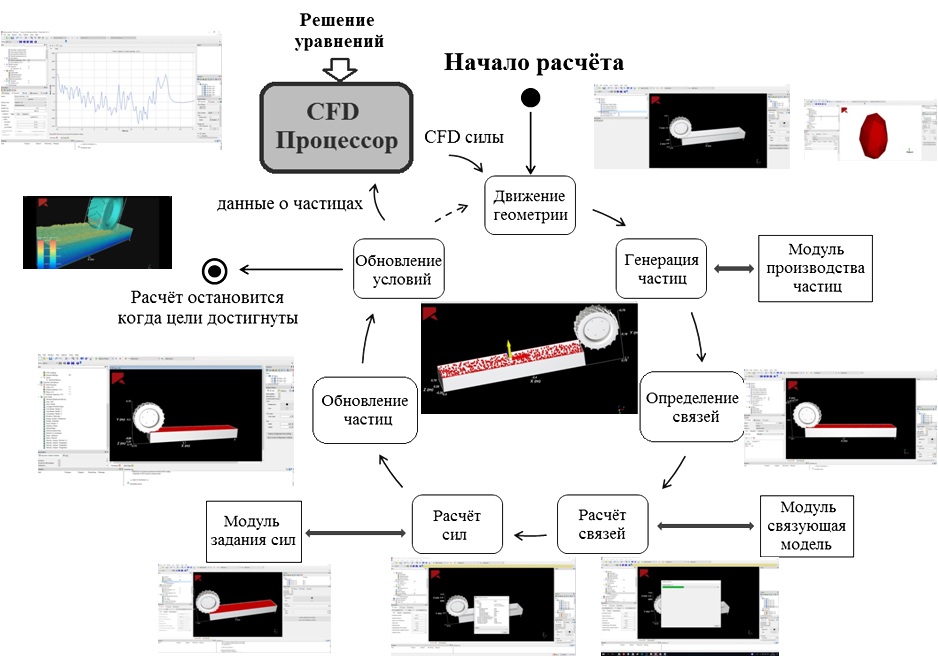
Рисунок 6 - Реализация модели взаимодействия колеса с почвой в программе Rocky DEM
Например, время расчета задачи при моделировании движения 1 миллиона сферических частиц по конвейерной линии на компьютере с 4-мя ядрами составляет примерно 11 часов, а для подобной задачи с несферическими частицами более 48 часов.
На рисунке 7 показаны результаты процесса взаимодействия шина-грунт, где наглядно видны процессы уплотнения почвы и образования колеи после прохода колеса, а также прилипание почвенных комков. Объектом исследований является колесо с шиной 23,1 R26 колесного трактора Т-150К, тип почвы – суглинок. В таблицах 2, 3 представлены параметры почвенной среды и основные параметры шины.
На рисунке 8 показан фрагмент графика изменения силы сопротивления качению колеса и в таблице 4 представлены результаты вычислений следующих показателей: силы сопротивления качению колеса, мощности потребляемой колесом и плотности почвы по центру колеи колеса на глубине 18 см.
Таблица 2 - Параметры почвенной среды
№ п/п | Показатели | значение |
1 | Модуль Юнга, Па | 1•106 |
2 | Коэффициент Пуассона | 0,3 |
3 | Коэффициент статического трения | 0,45 |
4 | Коэффициент динамического трения | 0,35 |
5 | Коэффициент реституции | 0,3 |
6 | Равновесная плотность почвы, кг/м3 | 1200 |
7 | Диаметр частиц, м | 0,03 |
Таблица 3 - Основные параметры шины
№ п/п | Показатели | значение |
1 | Модуль Юнга, Па | 3,5 • 106 |
2 | Коэффициент Пуассона | 0,48 |
3 | Коэффициент статического трения | 0,6 |
4 | Коэффициент динамического трения | 0,6 |
5 | Ширина, мм | 540 |
6 | Диаметр шины, мм | 1500 |
7 | Средняя высота грунтозацепов zг, мм | 50 |
8 | Средняя ширина грунтозацепов b, мм | 60 |
9 | Угол наклона грунтозацепа к продольной оси симметрии протектора, град | 40 |
10 | Шаг грунтозацепа, мм | 255 |
Расчеты численного моделирования показали, что сила сопротивления качению колеса при движении изменялась в интервале 2458,3…11408,05 Н, со средним значением 4408,36 Н. Мощность, потребляемая колесом, находился в пределах от 7758,64 до 18768,83 Вт со среднем значением 16176,69 Вт. Максимальное значение плотности почвы по следу на глубине 18 см увеличилось до 1502,7 кг/м3. Среднее значение плотности составило 1372 кг/м3, что привело к ее увеличению по следу колеса на 14% по сравнению с равновесной плотностью равной 1200 кг/м3.
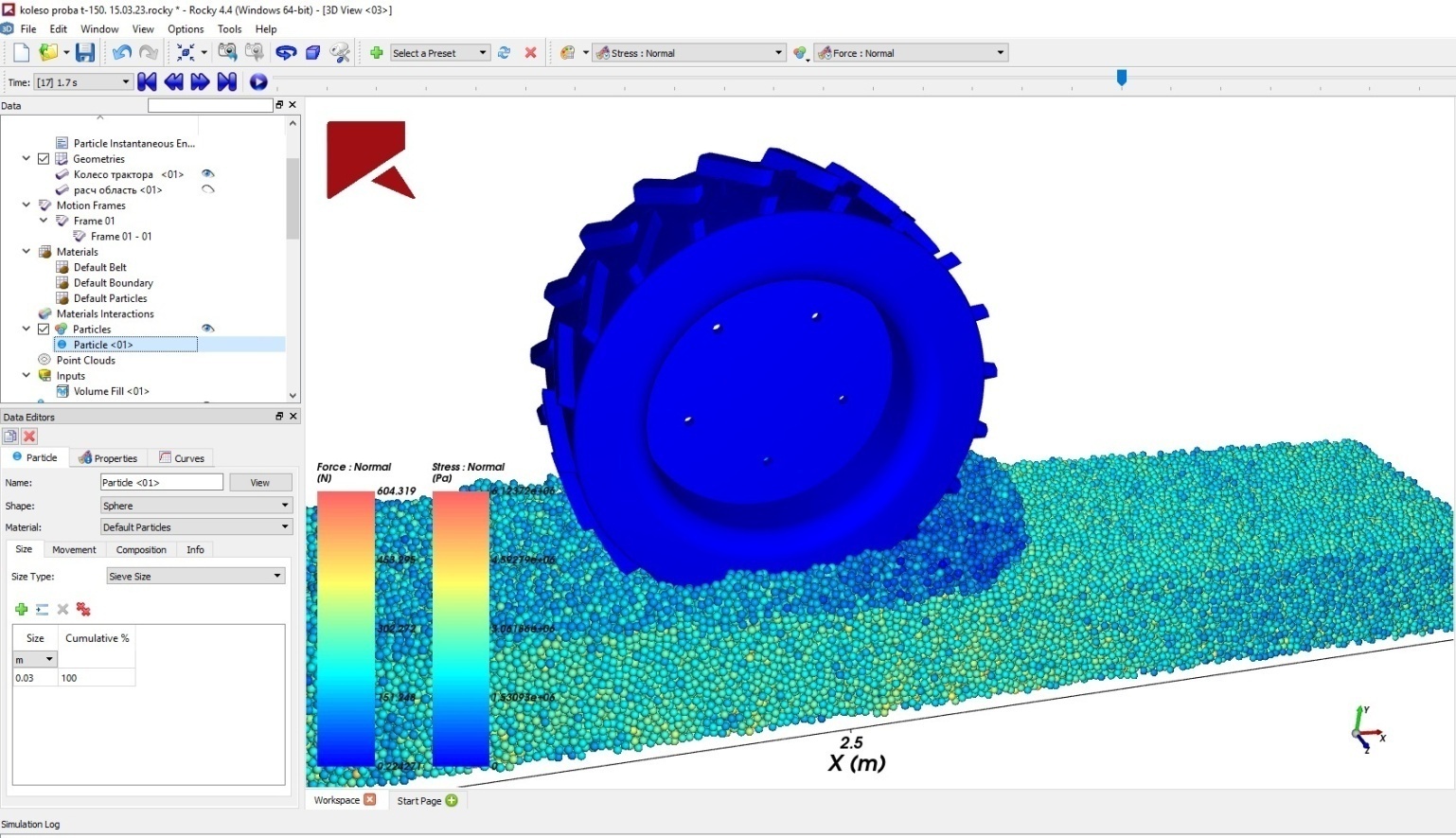
Рисунок 7 - Визуализация модели взаимодействия колеса с почвой
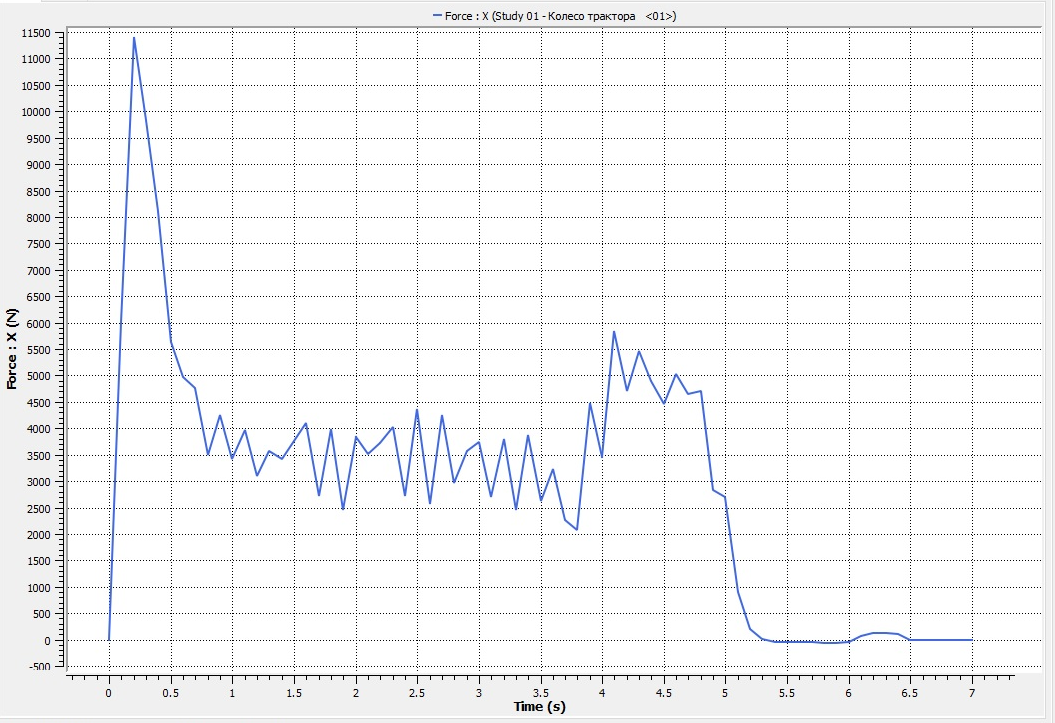
Рисунок 8 - Изменение силы сопротивления качению колеса
Таблица 4 - Результаты расчета основных показателей
№ п/п | Время, с | Сила сопротивлению качению колеса, Н | Мощность колеса, Вт | Плотность почвы, кг/м3 (на глубине 18 см) |
1 | 0 | 0 | 0 | 1368,34 |
2 | 0,1 | 6000,88 | 7758,64 | 1409,88 |
3 | 0,2 | 11408,05 | 12576,73 | 1389,11 |
4 | 0,3 | 9832,54 | 13716,76 | 1395,22 |
5 | 0,4 | 8113,58 | 13700,87 | 1412,32 |
6 | 0,5 | 5632,28 | 14187,69 | 1406,21 |
7 | 0,6 | 4976,78 | 14349,54 | 1407,43 |
8 | 0,7 | 4767,92 | 15096,13 | 1412,32 |
9 | 0,8 | 3497,44 | 15092,68 | 1412,32 |
10 | 0,9 | 4247,98 | 15326,45 | 1403,77 |
11 | 1 | 3425,05 | 15549,24 | 1409,88 |
12 | 1,1 | 3965,34 | 15632,02 | 1419,65 |
13 | 1,2 | 3100,70 | 16155,43 | 1422,09 |
14 | 1,3 | 3567,51 | 16087,41 | 1408,66 |
15 | 1,4 | 3417,82 | 16576,85 | 1412,32 |
16 | 1,5 | 3752,70 | 16787,90 | 1406,21 |
17 | 1,6 | 4107,30 | 17206,51 | 1411,1 |
18 | 1,7 | 2726,24 | 16905,98 | 1413,54 |
19 | 1,8 | 3993,31 | 17141,49 | 1413,54 |
10 | 1,9 | 2458,30 | 17145,23 | 1412,32 |
11 | 2 | 3833,36 | 17382,00 | 1406,21 |
12 | 2,1 | 3514,55 | 17762,99 | 1419,65 |
13 | 2,2 | 3720,97 | 17626,59 | 1442,86 |
14 | 2,3 | 4017,70 | 17936,52 | 1499,06 |
15 | 2,4 | 2714,99 | 17830,82 | 1502,73 |
16 | 2,5 | 4372,45 | 18250,89 | 1383,0 |
17 | 2,6 | 2570,32 | 18099,73 | 1270,6 |
18 | 2,7 | 4242,54 | 18167,96 | 1213,18 |
19 | 2,8 | 2969,24 | 18234,80 | 1111,77 |
20 | 2,9 | 3570,93 | 18246,09 | 1070,24 |
21 | 3,0 | 3732,09 | 18768,83 | 1062,91 |
Среднее | 4408,36 | 16176,69 | 1372,0 | |
4. Заключение
Таким образом, почвенные частицы обладают когезионными и адгезионными свойствами и почва является упруго-вязко-пластичной средой для моделирования взаимодействия движителей с почвой наиболее подходящим является модель контакта Герца-Миндлина.
Разработана модель взаимодействия колеса с почвой на основе метода дискретных элементов в программе Rocky DEM.
Полученные результаты можно использовать при энергетической и агротехнической оценке и оптимизации конструктивно-технологических параметров движителей тракторов и сельскохозяйственной техники. Предложенная методика позволяет повысить разработки новых конструкций движителей и постановки их на производство в предприятиях тракторного и сельскохозяйственного машиностроения.
В последующем модель почвенной среды на основе метода дискретных элементов должна учитывать неровности рельефа поля, анизотропность свойств почвы и динамический характер рабочих процессов и показывать процессы буксования и уплотнения.