DYNAMIC CONSTRAINT FORSES OF BEARINGS OF QUICKLY ROTATING AXIS-SYMMETRICAL ASKEW FIXED BODY

Баранов М.А.1, Мухопад К.А.2, Щербаков В.М.3;
1 доктор физико-математических наук, профессор, Алтайский государственный технический университет; 2 старший преподаватель, Алтайский государственный технический университет; 3 старший преподаватель, Алтайский государственный технический университет;
ДИНАМИЧЕСКИЕ РЕАКЦИИ ПОДШИПНИКОВ БЫСТРО ВРАЩАЮЩЕГОСЯ ОСЕССИММЕТРИЧНОГО ТЕЛА, ЗАКРЕПЛЁННОГО С ПЕРЕКОСОМ
Аннотация
Анализируются динамические реакции подшипников, на оси которых вращается тело произвольной осесимметричной формы, закреплённое так, что его ось симметрии образует произвольный угол с осью вращения.
Ключевые слова: осевая симметрия, вращение, силы инерции.
Baranov M. A.1, Mukhopad K.A.2, Shcherbakov V, M.3;
1 PhD in Physics and mathematics, professor, Altay State Technical University; 2 senior teacher, Altay State Technical University; 3 senior teacher, Altay State Technical University;
DYNAMIC CONSTRAINT FORSES OF BEARINGS OF QUICKLY ROTATING AXIS-SYMMETRICAL ASKEW FIXED BODY
Abstract
Dynamic constraint forces of bearings, on axis of which rotate axis-symmetrical body are analyzed. Corner between symmetrical axis and rotation axis can be arbitrary.
Keywords: axial symmetry, rotation, inertia forces.
Работа современных механизмов и машин основана на вращении деталей, большинство из которых имеют осесимметричную или близкую к ней форму. Это колёса, шестерни, маховики, роторы, крыльчатки, турбины и многое другое. Технологии изготовления подобных деталей (токарные и карусельные станки, точное литьё, штамповка) вполне отработаны и обеспечивают их необходимую точность. При совпадении оси симметрии детали с осью её вращения реакции подшипников во время вращения остаются такими же, как и в статическом состоянии, то есть, компенсирующими лишь силу тяжести. Однако даже самое незначительное несовпадение этих осей приводит к возникновению дополнительных динамических реакций подшипников, обусловленных вращением. При больших угловых скоростях абсолютная величина этих сил может значительно превышать вес вращающейся детали и, в конечном счёте, стать причиной выхода из строя подшипников или механизма в целом. В этой связи предвидение динамических реакций подшипников в зависимости от формы и размеров детали, а также параметров её установки остаётся крайне актуальным. Смещение центра масс произвольного вращающегося тела на ΔrC относительно оси вращения приводит к возникновению главного вектора центробежных сил инерции  . Выражение для модуля этого вектора является классическим
. Выражение для модуля этого вектора является классическим
 (1)
(1)
где m – масса вращающегося тела, аС – модуль ускорения центра масс, Ω – угловая скорость. Произвольное осесимметричное тело представимо в виде следа, заметаемого одним из главных сечений тела (плоской фигурой) при его вращении вокруг некоторой оси z (оси симметрии), лежащей в плоскости сечения и не пересекающей его (рисунок 1).
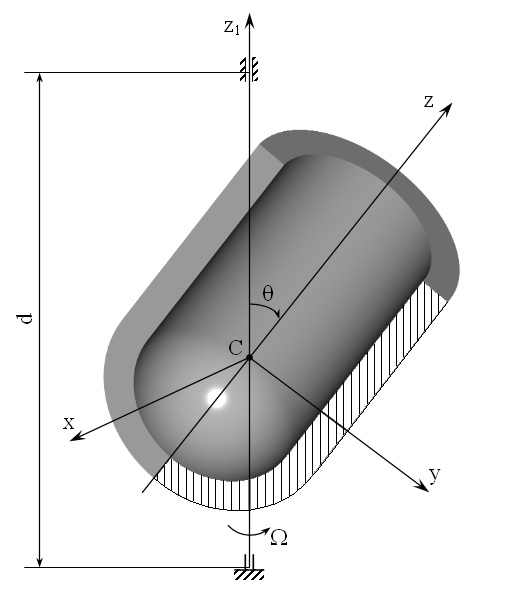
Рисунок 1. Разрез вдоль одного из главных сечений (показано штриховкой) осесимметричного тела, установленного на оси вращения z1 с перекосом. θ – угол перекоса; Cz – ось симметрии; Cx – ось поворота тела на угол θ .
Рассмотрим случай, когда центр масс С тела находится на оси вращения z1, а его ось симметрии z образует с ней угол θ. Ось z формально может быть совмещена с осью z1 путём обратного поворота тела на угол θ вокруг оси Cx, проходящей через центр масс перпендикулярно выбранному главному сечению. Ось y проведём из центра масс перпендикулярно оси z в плоскости сечения. Полученная система координат Cxyz жёстко связана с вращающимся телом. Главный вектор сил инерции в этом случае равен нулю, а главный момент сил инерции отличен от нуля и направлен параллельно оси x. Точное аналитическое выражение проекции главного момента сил инерции на ось x имеет вид
 (2)
(2)
где ρ – плотность материала, Ω – угловая скорость, Iформы – интеграл формы, зависящий только от формы и размеров главного сечения:
 . (3)
. (3)
Интегрирование в (3) проводится по площади сечения. ds – элемент площади. Строгий вывод этих соотношений приводится в [1, 2]. Реакции подшипников, обусловленные  образуют пару сил, величины которых равны
образуют пару сил, величины которых равны
 (4)
(4)
где d – расстояние между подшипниками. Замечательно то, что влияние внешних (угловая скорость, угол перекоса) и внутренних (плотность материала, форма и размер тела) факторов на динамические реакции в (2) и, следовательно, в (4) представлено в виде независимых сомножителей, что существенно упрощает анализ и возможное предвидение этих сил. Характерной особенностью интеграла формы (3) является то, что он пропорционален пятой степени размеров тела. Это означает, что при сохранении плотности материала и внешних параметров вращения пропорциональное увеличение размеров тела, например, в 2 раза приведёт к увеличению динамических реакций в 32 раза.
Допустимый интервал изменения угла θ от 0 (оси симметрии и вращения совпадают) до π/2 (оси перпендикулярны). В этом интервале углов sin(2θ) положителен. Поэтому знак проекции вращающего момента  на ось x совпадает со знаком интеграла формы. При внимательном рассмотрении (3) видно, что если в сечении превалирует координата y то
на ось x совпадает со знаком интеграла формы. При внимательном рассмотрении (3) видно, что если в сечении превалирует координата y то  , что характерно для сплюснутых тел. В этом случае возникает восстанавливающий момент сил инерции (Мвосст), направленный вдоль оси x и, следовательно, стремящийся совместить ось симметрии с осью вращения. В сечении вытянутых тел превалирует координата z. Интеграл формы таких тел отрицателен. Возникающий при этом момент сил инерции направлен против оси x и стремится расположить ось симметрии перпендикулярно оси вращения. Такой момент является опрокидывающим (Мопр). Наиболее наглядно это на примере однородного цилиндра, показанного на рисунке 2.
, что характерно для сплюснутых тел. В этом случае возникает восстанавливающий момент сил инерции (Мвосст), направленный вдоль оси x и, следовательно, стремящийся совместить ось симметрии с осью вращения. В сечении вытянутых тел превалирует координата z. Интеграл формы таких тел отрицателен. Возникающий при этом момент сил инерции направлен против оси x и стремится расположить ось симметрии перпендикулярно оси вращения. Такой момент является опрокидывающим (Мопр). Наиболее наглядно это на примере однородного цилиндра, показанного на рисунке 2.
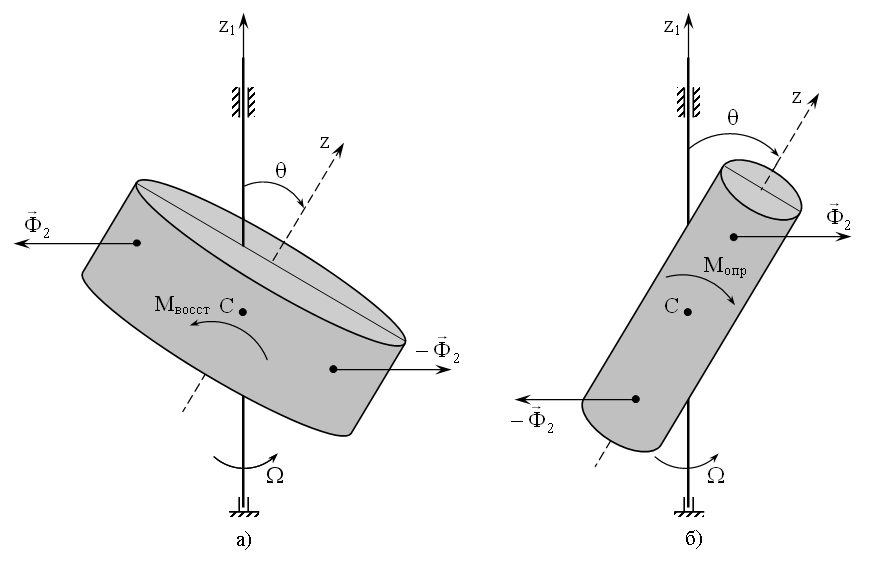
Рисунок 2. Восстанавливающий момент сил инерции (Мвосст), действующий на сплюснутый (а) цилиндр и опрокидывающий момент (Мопр), действующий на вытянутый (б) цилиндр при их вращении вокруг оси z1.  и -
и - – главные векторы сил инерции, действующие на одну из половинок цилиндра.
– главные векторы сил инерции, действующие на одну из половинок цилиндра.
В соответствии с (3) пропорции размеров главного сечения можно подобрать так, что интеграл формы окажется нулевым. В этом случае, как момент сил инерции , так и динамические реакции  останутся нулевыми при любых углах перекоса. Тело вращения с такими пропорциями правомерно назвать телом нейтральной формы. Тривиальным примером тела нейтральной формы является сферически симметричное тело.
останутся нулевыми при любых углах перекоса. Тело вращения с такими пропорциями правомерно назвать телом нейтральной формы. Тривиальным примером тела нейтральной формы является сферически симметричное тело.
Пример.
Из тонкостенной трубы диаметра D требуется изготовить маховик. Определить такую длину h заготовки трубы, чтобы при случайном перекосе осей маховика, допущенном при его изготовлении дополнительные динамические реакции подшипников не возникали. Массой спиц, связывающих маховик с осью пренебречь.
Для решения данной задачи получим выражение для интеграла формы и приравняем его к нулю. Начало координат необходимо совместить с центром масс маховика, который совпадает с его геометрическим центром. Элемент площади сечения удобнее всего выбрать в виде ds=dydz.
 (5)
(5)
Пусть ΔR - малая, но не нулевая толщина трубы. Поскольку труба тонкая, то интегрирование по y имеет смысл заменить одним слагаемым при y=R
 (6)
(6)
отсюда  или
или  .
.
Момент сил инерции тел скомбинированных из материалов различной плотности представляется в виде суммы соответствующих моментов от их однородных частей. Для тел, имеющих выборки материала – диски с вырезами, крыльчатки, шестерни, колёса турбин и т.п. в выражениях (2) – (4) необходимо использовать значение плотности, усреднённой по заметаемому объёму. Естественно, что из-за отсутствия материала в выбранных объёмах усреднённая плотность окажется ниже плотности сплошного материала. В наиболее общем случае, когда ось вращения и ось симметрии являются скрещивающимися прямыми, реакции подшипников вынуждены компенсировать как главный вектор, так и главный момент сил инерции. При этом на одном из подшипников действие этих факторов компенсируется, а на другом усиливается.
Почти всегда динамические реакции подшипников являются вредными. При этом основная опасность заключается вовсе не в их большой величине, которая может в десятки и даже сотни раз превышать вес тела, а в том, что они знакопеременные. Меняя своё направление вместе с вращающимся телом Ω раз каждые π секунд, они приводят к эффекту отбойного молотка. Единственный способ борьбы этими силами заключается в точном изготовлении вращающихся деталей и в их точной установке.
В отличие от уже рассмотренных сил, от динамических реакций, обусловленных гироскопическим эффектом, невозможно избавиться никаким точным изготовлением деталей или их точной установкой. Но это и не страшно, поскольку таковые пропорциональны лишь первой степени угловой скорости и не знакопеременные.
References
Расчётные задания по теоретической механике [Текст]: учебное пособие / М.А.Баранов, К.А.Мухопад.- изд-во АлтГТУ, 2011.- 256 с.
Баранов М.А., Мухопад К.А. Расчётные задания по теоретической механике.- (http//www.theormech2011.narod2.ru).
References
Расчётные задания по теоретической механике [Текст]: учебное пособие / М.А.Баранов, К.А.Мухопад.- изд-во АлтГТУ, 2011.- 256 с.
Баранов М.А., Мухопад К.А. Расчётные задания по теоретической механике.- (http//www.theormech2011.narod2.ru).