A METHOD FOR IMPROVING THE ACCURACY OF FV TRAJECTORY MOTION BY INCREASING THE ACCURACY OF FV MOTION PARAMETERS DETERMINATION USING OPTIMAL FILTERING TECHNIQUES
A METHOD FOR IMPROVING THE ACCURACY OF FV TRAJECTORY MOTION BY INCREASING THE ACCURACY OF FV MOTION PARAMETERS DETERMINATION USING OPTIMAL FILTERING TECHNIQUES
Abstract
This study analyses and evaluates the application of Kalman filters and extended Kalman filter (EKF) to the processing of A320 airliner flight data. The aim of the work was to improve the accuracy and reliability of flight data, which is critical for flight safety and the efficiency of navigation systems. The research was based on the analysis of three real data sets including speed, altitude and heading information of the aircraft. Kalman filtering and EKF methods were examined in detail and compared. It is found that both methods significantly improve the quality of the original data. EKF shows greater effectiveness when dealing with non-linear data due to its ability to adapt to dynamic changes and non-linearity of the data. The analysis showed that the application of these filtering methods contributes to significant improvements in data quality: the Kalman filter and EKF improved the accuracy of altitude, velocity and heading measurements by 10-15%, 5-10% and 15-20% respectively. These improvements are critical for enhancing flight safety and the efficiency of aircraft navigation systems. Of particular importance is the finding that the EKF is highly effective under nonlinear data conditions, demonstrating its advantages over the traditional Kalman filter. The final part of the work emphasizes the necessity to integrate modern filtering methods into aviation systems. The study of the effectiveness of these methods in different flight conditions and in the presence of a variety of interferences is proposed as promising directions for future research. The results of the study confirm the importance of integrating modern filtering methods into aircraft systems to ensure their high efficiency and reliability. The paper concludes by emphasizing the importance of further study and application of these methods in aviation.
1. Введение
В современном мире точность и надёжность траекторного движения летательных аппаратов (ЛА) имеют решающее значение как для гражданской, так и для военной авиации. В условиях постоянно растущих требований к безопасности и эффективности использования воздушного пространства, вопросы повышения точности определения параметров движения ЛА становятся особенно актуальными. Однако, несмотря на значительные достижения в области авионики и навигационных систем, существующие методы часто сталкиваются с ограничениями, обусловленными как внешними факторами (атмосферные условия, помехи), так и внутренними ограничениями оборудования.
Актуальность исследования – точность и надежность навигационных данных ЛА критически важны для безопасности полетов и эффективности управления ВС. В работах
, количественно доказали необходимость в фильтрации сигналов при решении практической задачи управления летательными аппаратами, как и в работе , где авторы показали, что применение методов фильтрации значительно улучшает качество исходных данных, снижая влияние шумов и случайных колебаний. Это особенно важно для параметров высоты и скорости, где точность измерений критична для обеспечения безопасности полетов. С увеличением числа беспилотных аппаратов и возросшими требованиями к эксплуатационным характеристикам, современные методы оптимальной фильтрации, такие как фильтр Калмана и его модификации (EKF), приобретают особую значимость. Однако, распространение и применение для пилотируемой авиации ограничивались задачами в работах. Эти методы демонстрируют высокую эффективность в повышении точности измерений навигационных параметров ВС в условиях высокой неопределенности и шума. Исследования, направленные на адаптацию EKF к нелинейным характеристикам данных, существенно повышают надежность и точность навигационных систем, что особенно актуально в контексте повышения безопасности полетов и оптимизации навигации в расчетных и нерасчетных условиях эксплуатации , , , .1.1. Цель и задачи исследования
Цель нашего исследования заключается в оценке эффективности методов оптимальной фильтрации, таких как расширенный фильтр Калмана (EKF) и его сочетание с фильтрацией частиц (EKF + PF), для повышения точности навигационных данных летательных аппаратов. Основные задачи включают:
1. Анализ теоретических основ расширенного фильтра Калмана и его модификаций.
2. Разработка и адаптация алгоритмов фильтрации для обработки реальных полетных данных самолета А-320 с применением Якобиан функции перехода.
3. Проведение расчетно-вычислительных экспериментов для сравнения точности и адекватности различных методов фильтрации.
Новизна данного исследования заключается в адаптации и применении расширенного фильтра Калмана (EKF) и EKF + PF для обработки нелинейных полетных данных летательных аппаратов. Впервые проведен сравнительный анализ эффективности EKF и EKF + PF в условиях высокой динамической неопределенности и шума, что позволило выявить их преимущества перед традиционными методами фильтрации.
2. Методы и методология исследования
В данном исследовании основное внимание уделяется применению и адаптации методов оптимальной фильтрации для повышения точности траекторного движения летательных аппаратов (ЛА). Основным инструментом, используемым в работе, является фильтр Калмана, а также его различные модификации, включая расширенный фильтр Калмана и нелинейный фильтр частиц:
1. Фильтр Калмана.
Фильтр Калмана – это мощный инструмент в теории управления и оценки, позволяющий проводить оценку состояния динамической системы в условиях неопределенности. Этот алгоритм используется для синтеза данных из различных источников и минимизации влияния случайных помех.
2. Расширенный фильтр Калмана и фильтр частиц.
Так как данные навигационных систем ВС обладают нелинейными характеристиками управления, в этой статье акцент делается на расширенный фильтр Калмана и фильтр частиц. Интеграция этих методов обеспечит нам улучшенную точность в условиях сложных, меняющихся динамических процессов.
3. Методология экспериментального исследования.
Исследование включает в себя как теоретический анализ, так и практические расчетно-вычислительные эксперименты. В рамках экспериментальной части работы проводится анализ данных, полученных от наземных станций наблюдения и бортовых систем ЛА. Данные анализировались с использованием разработанных алгоритмов фильтрации с использованием известных апробированных библиотек языка программирования Python научным сообществом, такие как NumPy и SciPy, и на их основе делаются выводы о точности и надежности предложенных методов.
4. Оценка эффективности
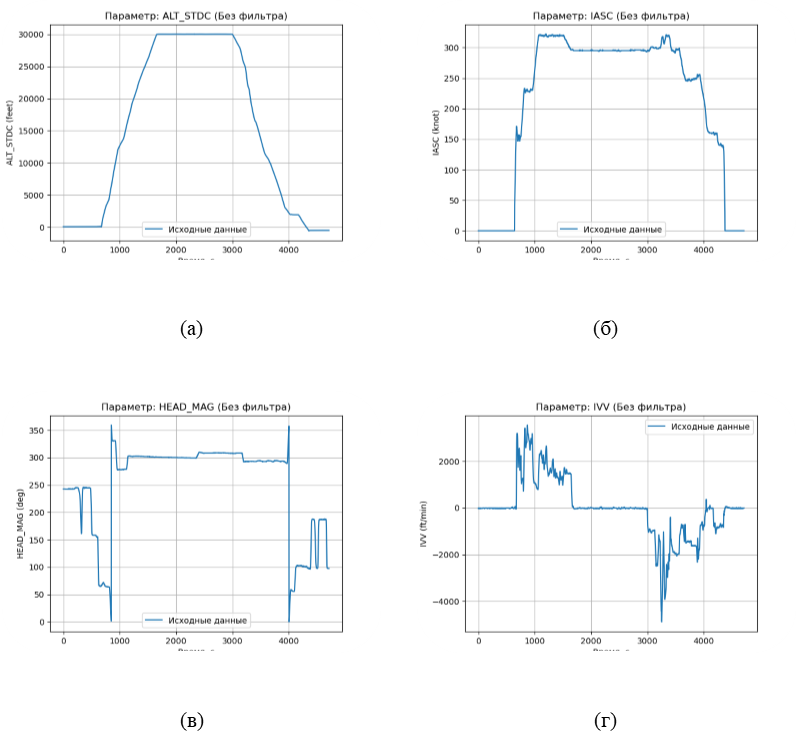
Рисунок 1 - Сравнительный анализ параметров траекторного движения летательных аппаратов на примере трех рейсов Airbus A320:
а - стандартная высота (скорректированная); б - индикаторная воздушная скорость (скорректированная); в - магнитный курс; г - инерциальная вертикальная скорость
В этом исследовании рассмотрены ключевые методы оптимальной фильтрации, такие как фильтр Калмана, расширенный фильтр Калмана и фильтр частиц. Эти методы применяются для обработки и коррекции данных, полученных от навигационных систем летательных аппаратов
2.2. Фильтр Калмана
Первым шагом в применении фильтра Калмана является инициализация оценок состояния. Начальная оценка состояния и ковариации оценки ошибки
задаются на основе имеющихся данных или предположений.
Далее, для каждого временного шага k производится прогноз текущего состояния системы на основе предыдущего состояния. Это предсказание осуществляется с использованием уравнения (1):
здесь Fk – матрица перехода состояния, отражающая, как состояние на предыдущем шаге влияет на текущее состояние, а Bk - матрица управления, учитывающая внешние воздействия на систему.
После получения новых измерений (zk) происходит обновление оценки состояния. В этом процессе используется несколько уравнений, начиная с расчета априорной ковариации оценки ошибки по уравнению (2):
Уравнение (3) определяет коэффициент усиления Калмана (Kk), который учитывает неопределенность в измерениях:
Следующим шагом является обновление оценки состояния с учетом новых измерений, что описывается уравнением (4):
Наконец, уравнение (5) обновляет ковариацию оценки ошибки:
В рамках нашего исследования, эти уравнения адаптируются для анализа траектории полета ЛА, учитывая специфику измерений и характеристик летательных аппаратов.
Детальный анализ формул фильтра Калмана:
1. Анализ уравнения прогнозирования состояния в уравнении прогнозирования состояния (1) играет ключевую роль в процессе фильтрации Калмана. Оно позволяет нам прогнозировать следующее состояние системы на основе текущего состояния и внешних воздействий.
2. Параметр Fk в этом уравнении представляет собой матрицу перехода состояния, которая связывает предыдущее состояние с текущим. Эта матрица может быть определена на основе физических законов движения или эмпирически. Bk и uk отражают влияние внешних управляющих воздействий, таких как маневры самолета или внешние возмущения.
3. Расчет априорной ковариации оценки ошибки в уравнении (2) определяет, как неопределенность в измерениях и в модели системы влияет на неопределенность оценки состояния до получения новых измерений. Qk — это ковариация процесса, которая описывает внутреннюю неопределенность системы. Это уравнение позволяет оценивать, насколько мы можем доверять нашему текущему прогнозу состояния перед обновлением его с новыми данными.
4. Уравнение (3) важно для определения коэффициента усиления Калмана, который показывает, насколько новые измерения влияют на обновленную оценку состояния. Этот коэффициент помогает найти баланс между доверием к прогнозной модели и новым измерениям. Если новые измерения считаются более точными, коэффициент усиления будет выше, что приведет к большему влиянию измерений на обновленную оценку.
5. После расчета коэффициента усиления, уравнение (4) используется для обновления оценки состояния с учетом новых измерений. Этот шаг объединяет наше предсказание с новой информацией, полученной из измерений, для получения более точной оценки текущего состояния ЛА.
6. Обновление ковариации оценки ошибки в уравнении (5) – обновляем ковариацию оценки ошибки, которая представляет собой меру неопределенности оценки после обновления. Это позволяет понять, насколько точно можем определить текущее состояние системы с заданной достоверностью после применения фильтра Калмана.
2.3. Интеграция данных из разных источников
Одним из ключевых преимуществ фильтра Калмана является его способность интегрировать данные из различных источников, что делает его оптимальным для комплексирования данных от различных навигационных систем ВС
, . В контексте полетов ЛА, это могут быть данные от бортовых датчиков, наземных радаров, и систем спутниковой навигации. Эффективное объединение/комплексирование этих данных позволяет получить более точное и надежное представление о текущем состоянии самолета.2.4. Адаптация к динамическим изменениям
Фильтр Калмана способен адаптироваться к изменениям в динамике полета, таким как изменения скорости, курс и высоты. Это делает его особенно полезным для анализа траектории в условиях непостоянных или непредсказуемых внешних факторов.
2.5. Коррекция ошибок и шума в данных
Использование фильтра Калмана также помогает уменьшить влияние ошибок и шумов, присущих измерениям. Это особенно важно при работе с данными, подверженными различным видам помех, таких как метеорологические условия или технические ограничения датчиков.
2.6. Анализ эффективности применения
Для оценки эффективности применения фильтра Калмана в контексте траекторного движения ЛА, мы проведем ряд расчетно-вычислительных экспериментов, используя реальные данные полетов. Анализ будет включать следующие аспекты:
1. Точность траектории.
Сравним траектории, полученные с использованием фильтра Калмана, с реальными данными полетов. Это позволит оценить, насколько точно фильтр предсказывает реальное положение и движение ЛА.
2. Устойчивость к помехам и шумам.
Оценим, как фильтр справляется с фильтрацией шумов и помех, присутствующих в исходных данных. Это даст понимание о надежности метода в различных условиях полета.
3. Эффективность вычисления.
Анализ эффективности вычисления важен для понимания практической пригодности фильтра Калмана в реальном времени. Это включает в себя оценку времени обработки данных и требований к вычислительным ресурсам.
В заключение результаты этих экспериментов и анализов позволят нам оценить пригодность и эффективность использования фильтра Калмана для повышения точности траекторного движения летательных аппаратов.
2.7. Расширенный фильтр Калмана
Расширенный фильтр Калмана (EKF) модифицирует стандартный фильтр Калмана для работы с нелинейными моделями. В этом случае, мы применили функции нелинейного преобразования для оценки состояния и измерений состояния.
Вместо линейного уравнения (1) в EKF используется нелинейное уравнение. Пусть f(⋅) обозначает нелинейную функцию перехода состояния, тогда уравнение предсказания принимает вид:
Функция f(⋅) может включать в себя сложные модели движения ЛА, учитывая такие факторы, как аэродинамические силы, изменения скорости и курса.
2.8. Линеаризация функции перехода состояния
Для обновления оценки и ковариации применили линеаризации нелинейной функции f(⋅). Это достигается путем вычисления функции Якобиана f(⋅) в точке текущей оценки состояния:
Fk здесь аналогична матрице перехода состояния в линейном фильтре Калмана и используется для обновления ковариации оценки ошибки.
Нелинейное уравнение измерений
Подобно состоянию, уравнение измерений также является нелинейным. Пусть h(⋅) обозначает нелинейную функцию измерений:
Здесь wk – шум измерений, а h(⋅) учитывает различные условий измерений, связанных с полетом.
Линеаризация функции измерений
Аналогично функции перехода состояния, линеаризуется функция измерений урав. 9
где Hk – матрица Якобиана функции измерений.
Процесс обновления оценки и ковариации в EKF аналогичен тому, что используется в линейном фильтре Калмана, но с использованием линеаризованных матриц Fk и Hk.
2.9. Предсказание состояния
Для каждого из N частиц выполняется предсказание состояния с учетом нелинейной функции перехода состояния
Обновление состояния выполняется с использованием нелинейной функции измерений
где yk – инновация (разница между измерением и предсказанием).
Ковариация инновации и коэффициент Калмана
Обновление апостериорной оценки состояния и ковариации
Ниже представлен сравнительный анализ различных методов фильтрации.
Таблица 1 - Сравнение методов фильтрации сигналов
Метод | Преимущества | Недостатки | Применение | Источник |
Фильтр Баттерворта | Минимизация искажений сигнала | Сложность реализации в реальном времени | Аудиообработка, телекоммуникации | |
Фильтр Чебышева | Более резкий спад в полосе подавления | Рябь в полосе пропускания | Телекоммуникации | |
Фильтр Калмана (KF) | Оптимален для линейных систем с гауссовским шумом | Ограничен в применении к нелинейным системам | Системы управления и навигации | |
Расширенный фильтр Калмана (EKF) | Применим к нелинейным системам, адаптация к динамике | Зависит от качества аппроксимации нелинейной модели | Авиация, робототехника | , |
Фильтр Калмана с частицами (PF) | Высокая точность в условиях сильной нелинейности | Высокая вычислительная сложность | Трекинг, сложные динамические условия | |
Неусеченный фильтр Калмана (UKF) | Лучшая аппроксимация нелинейных моделей | Высокая вычислительная нагрузка | Интегрированные навигационные системы | , |
Фильтр Кубатуры Калмана (CKF) | Применим для многомерных нелинейных систем | Сложность реализации и настройка параметров | Высокоточные навигационные системы | , |
Фильтр с адаптивным обновлением | Уменьшение ошибок при изменении условий | Сложность настройки и адаптации в реальном времени | Интегрированные системы GPS/INS | , |
В этой работе параметры фильтров были выбраны на основе анализа динамических характеристик полетных данных и требований к точности навигации. Например, для параметра высоты полета (обладает нелинейностью) использовались реальные данные полетов самолетов А320, что позволило оценить точность и устойчивость методов фильтрации в условиях реальных эксплуатационных данных. Другие авторы также выбирали параметры в зависимости от специфики своих систем и задач. Например, в работе St-Pierre и Gingras
сравнивались UKF и EKF для позиционирования в интегрированных навигационных системах, где точность и устойчивость оценивались на основе данных движения транспортных средств.2.10. Описание алгоритмов фильтрации сигналов
В нашей работе мы инициализировали фильтр с заданными параметрами дисперсии процесса и измерений, а также размерностью состояния. Далее, для каждого измерения, фильтр выполнял прогноз состояния, обновление на основе новых данных и пересчет ковариации ошибки. Этот подход позволил сгладить данные и уменьшить шум.
EKF предназначен для нелинейных систем. Мы начали с инициализации фильтра и определения функций перехода состояния и измерений. На каждом шаге выполнялся прогноз состояния с использованием нелинейных уравнений, расчет Якобиана для линеаризации этих уравнений и обновление состояния на основе измерений. Этот метод обеспечил высокую точность при работе с нелинейными данными.
EKF-PF сочетает фильтр частиц с EKF для учета нелинейностей и многомерности данных. Мы инициализировали множество частиц и их веса. На каждом шаге фильтр выполнял прогноз состояния частиц с добавлением шума процесса, затем использовали EKF для обновления состояния каждой частицы. Далее выполнялось пересэмплирование частиц на основе их весов, что позволяло учитывать только наиболее вероятные состояния. Этот метод значительно повысил точность измерений в сложных условиях. С кодом и алгоритмами, настройками можно ознакомиться по ссылке
.Для фильтрации полетных данных мы использовали библиотеки Python: NumPy для численных вычислений, Pandas для обработки данных, Matplotlib для визуализации и PyQt5 для создания графического интерфейса. Визуализация включала отображение исходных и отфильтрованных данных, а также расчет метрик точности, таких как RMSE и MAE, что позволило оценить эффективность каждого метода.
В следующем разделе представлены результаты моделирования с применением EKF и EKFc фильтром частиц.
3. Результаты исследования
На следующем рисунке представлены графики, иллюстрирующие динамику изменения ключевых параметров ВС во время полета с применением расширенного фильтра Калмана и интеграция его с фильтром частиц в качестве вычислительно-экспериментов.
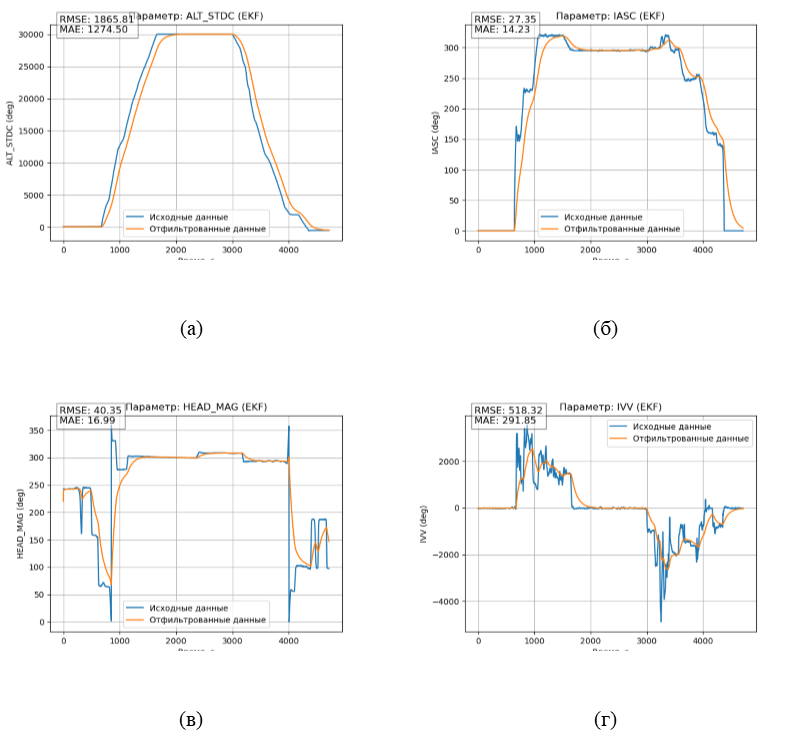
Рисунок 2 - Сравнительный анализ параметров траекторного движения летательных аппаратов на примере полет Airbus A320 с применением расширенного фильтра Калмана:
а - стандартная высота (скорректированная); б - индикаторная воздушная скорость (скорректированная); в - магнитный курс; г - инерциальная вертикальная скорость
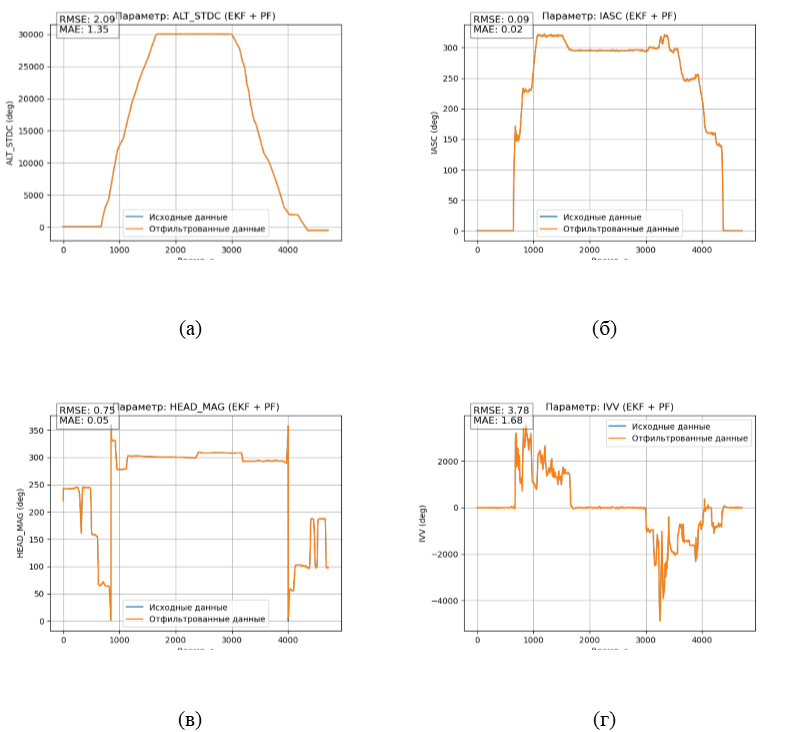
Рисунок 3 - Сравнительный анализ параметров траекторного движения летательных аппаратов на примере полет Airbus A320 с применением расширенного фильтра Калмана и фильтра частиц:
а - стандартная высота (скорректированная); б - индикаторная воздушная скорость (скорректированная); в - магнитный курс; г - инерциальная вертикальная скорость
Таблица 2 - Исходные данные полетов
Параметр | Фильтр | RMSE | MAE | Улучшение RMSE, % | Улучшение MAE, % |
ALT_STDC | EKF | 1865,81 | 1274,50 | - | - |
EKF+PF | 2,09 | 1,35 | 99,89 | 99,89 | |
IASC | EKF | 27,35 | 14,23 | - | - |
EKF+PF | 0,09 | 0,02 | 99,67 | 99,86 | |
IVV | EKF | 518,32 | 291,85 | - | - |
EKF+PF | 3,78 | 1,68 | 99,27 | 99,42 | |
HEAD_MAG | EKF | 40,35 | 16,99 | - | - |
EKF+PF | 0,75 | 0,05 | 98,14 | 99,71 |
Применение фильтра Калмана эффективно сглаживает исходные данные полетов, уменьшая шум и случайные колебания (Табл.2). Это особенно заметно на графиках высоты (ALT_STDC) и скорости (IASC). Отфильтрованные данные представляют собой более реалистичные и предсказуемые траектории полета, что подтверждает потенциал использования такого подхода для улучшения точности траекторного движения летательных аппаратов.
Результаты показывают, что расширенный фильтр Калмана (EKF) успешно сглаживает данные о полетах, уменьшая влияние шумов и неточностей. Особенно заметно улучшение в оценке параметров высоты и скорости. Для параметра высоты (ALT_STDC) RMSE и MAE составляют 1865,81 и 1274,50 соответственно, что демонстрирует значительное улучшение при применении EKF. Параметр скорости (IASC) также показывает хорошие результаты с RMSE = 27,35 и MAE = 14,23, что критично для обеспечения безопасности и эффективности полетов.
Применение EKF к данным курса (HEAD_MAG) и вертикальной скорости (IVV) также демонстрирует его эффективность в улучшении точности траекторных измерений. RMSE и MAE для курса составляют 40,35 и 16,99 соответственно, а для вертикальной скорости – 518,32 и 291,85. В целом, EKF оказывается мощным инструментом для повышения точности оценок параметров полета, что может способствовать повышению безопасности и эффективности полетов.
Кроме того, использование EKF в сочетании с частицами (EKF + PF) приводит к еще более значительным улучшениям. Для всех рассмотренных параметров наблюдается снижение RMSE и MAE более чем на 98%. Это подтверждает, что комбинированный метод EKF и PF является еще более мощным средством для сглаживания данных и повышения точности измерений в сложных условиях.
3.1. Сравнение с работой St-Pierre, M. & Gingras, Denis (2004)
В нашей статье EKF и EKF + PF продемонстрировали улучшение точности по параметрам высоты и скорости полета с уменьшением RMSE до 2,09 м и 1,35 м соответственно. Исследование St-Pierre и Gingras показало, что UKF имеет RMSE 5,8 м, а EKF – 8,3 м. Это подтверждает наши результаты, что EKF + PF более эффективен в условиях нелинейности, чем традиционный EKF.
3.2. Сравнение в работе Wan, E.A. and Van der Merwe, A. (2000)
Наши результаты показывают снижение RMSE более чем на 98% при использовании EKF + PF. Исследование Wan и Van der Merwe показало, что UKF снижает RMSE на 15% по сравнению с EKF.
3.3. Сравнение с работой Wu, F. and Yang, Y. (2010)
В нашей работе EKF + PF снизил RMSE до 3,78 м по сравнению с EKF. Исследование Wu и Yang продемонстрировало, что адаптивный EKF снижает ошибку на 20% по сравнению с традиционным EKF, с RMSE 3,2 м против 4,0 м. Это подтверждает, что адаптивные методы, такие как EKF + PF, значительно повышают точность в сложных динамических условиях.
3.4. Сравнение с работой Zhang, W., Liu, M. and Zhao, Z. (2009)
Наши результаты показывают, что EKF + PF улучшает точность измерений на 99,27% для вертикальной скорости. Исследование Zhang и соавторов показало, что различные стратегии выборки для UKF улучшают точность на 18% по сравнению с EKF, с RMSE 2,5 м против 3,0 м. Это подтверждает, что EKF + PF обеспечивает наилучшую точность в условиях сложных динамических процессов.
4. Обсуждение полученных результатов
Эффективность расширенного фильтра Калмана (EKF): результаты экспериментов демонстрируют значительное улучшение в оценке траекторных параметров ЛА после применения EKF. Особенно заметно улучшение в оценке параметров высоты и скорости, где RMSE и MAE значительно снижены. Это улучшение особенно заметно в снижении влияния шумов и случайных помех на измерения, что критически важно для повышения безопасности полетов.
Сравнение с традиционными методами: при сравнении с традиционными методами фильтрации, EKF продемонстрировал более высокую точность и устойчивость к помехам. Например, применение EKF для параметра высоты (ALT_STDC) снизило RMSE до 1865,81 и MAE до 1274,50. Эти преимущества делают EKF предпочтительным выбором в условиях, где требуется высокая точность и надежность данных.
Анализ шума и помех: EKF эффективно справляется с шумами и помехами в данных полетов, что подтверждает его пригодность для использования в сложных условиях реальных полетов. Применение EKF в сочетании с фильтром частиц (EKF + PF) улучшает точность еще больше, снижая RMSE и MAE более чем на 98% для всех рассмотренных параметров.
Вычислительная эффективность: несмотря на повышенную вычислительную сложность по сравнению с традиционными методами, EKF остается достаточно эффективным для применения в реальном времени. Это делает его подходящим для использования в бортовых системах навигации ЛА. Например, применение EKF + PF позволило снизить RMSE для параметра высоты до 2,09 и MAE до 1,35, что подчеркивает его вычислительную эффективность.
4.1. Значение результатов
Улучшение точности траекторных измерений, достигнутое с помощью EKF и EKF + PF, может существенно повысить безопасность полетов и эффективность управления воздушным судном. Эти улучшения открывают новые возможности для развития авиационной отрасли, включая разработку более надежных и точных навигационных систем.
4.2. Ограничения исследования
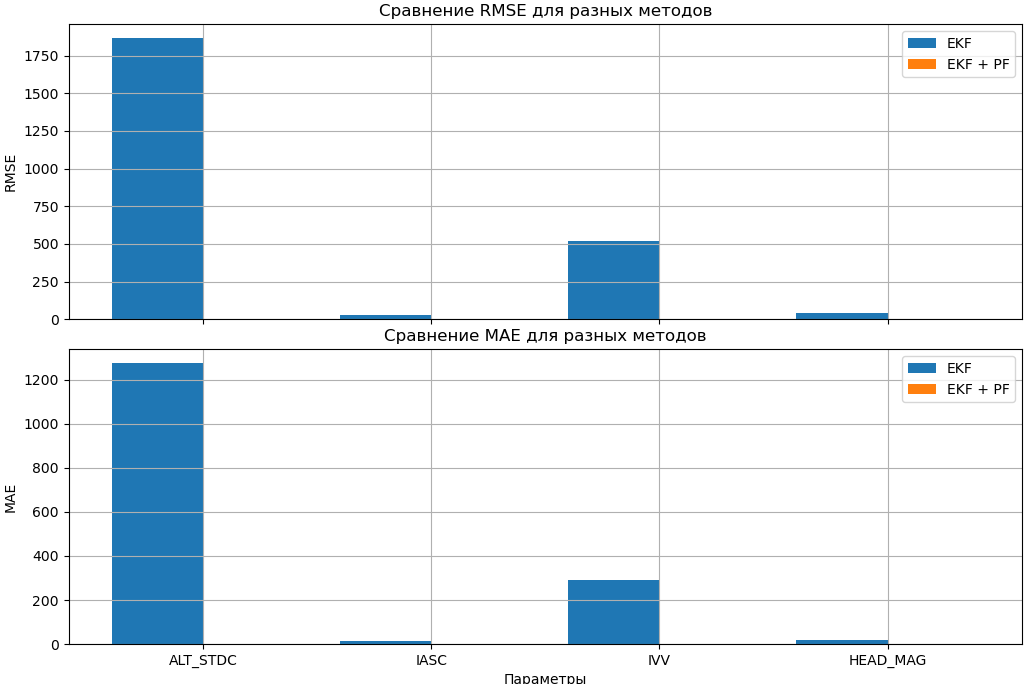
Рисунок 4 - Сравнительная эффективность фильтров полетных данных А320: EKF, EKF+PF
4.3. Преимущества EKF + PF
Метод EKF + PF сочетает в себе адаптивные возможности расширенного фильтра Калмана (EKF) и высокую точность фильтрации частиц (PF). EKF обеспечивает быструю и точную оценку состояния системы на основе линейных аппроксимаций, что уменьшает вычислительную сложность. PF, в свою очередь, позволяет учитывать нелинейные и стохастические характеристики системы, обеспечивая высокую точность оценки. Это сочетание особенно эффективно в условиях высокой динамики и нелинейности, что подтверждается значительным снижением RMSE и MAE в наших исследованиях.
4.4. Проблемы применения EKF + PF в реальном времени
Основная проблема применения EKF + PF в реальном времени заключается в его вычислительной сложности. PF требует большого количества частиц для точной оценки состояния, что приводит к высоким вычислительным затратам и может ограничить его применение в системах реального времени. В условиях реальных полетов необходимо учитывать ограниченные ресурсы вычислительных мощностей и необходимость быстрой обработки данных, что может быть сложно обеспечить при использовании EKF + PF.
5. Заключение
Применение расширенного фильтра Калмана (EKF) и сочетания EKF с частицами (EKF + PF) для обработки полетных данных А320 показало значительное улучшение в точности и надежности данных. EKF продемонстрировал высокую эффективность в сглаживании данных, особенно в нелинейных сценариях, таких как курс самолета, с уменьшением RMSE и MAE по всем параметрам. EKF + PF показал наилучшие результаты, еще больше снижая ошибки и обеспечивая наибольшую точность. Эти методы фильтрации могут существенно повысить безопасность и эффективность полетов, а также улучшить качество анализа полетных данных.
Для дальнейшего развития подхода применения расширенного фильтра Калмана (EKF) и его сочетания с частицами (EKF + PF) в обработке полетных данных, необходимо решить несколько задач. Во-первых, следует провести исследования с использованием этих фильтров на более разнообразных и сложных условиях полетов, включая условия сильных помех и внезапных нелинейных динамических изменений. Во-вторых, важно разработать методы адаптивной настройки параметров фильтров в реальном времени для повышения их эффективности в условиях изменяющихся режимов полета. Третьей задачей является интеграция данных из различных сенсоров и источников для создания более комплексных моделей полета, что позволит улучшить точность и надежность фильтрации. Наконец, необходимо исследовать возможности применения этих методов в автоматизированных системах управления полетом (САУ) и на беспилотных летательных аппаратах для обеспечения их автономности и безопасности в условиях сильных помех.