SIMULATING OVERCOMING OBSTACLES BY A QUANTOMOBILE
SIMULATING OVERCOMING OBSTACLES BY A QUANTOMOBILE

Abstract
The aim of the computational study was to develop and simulate overcoming obstacles procedures (OOP) for a quantomobile (a vehicle with a quantum engine (QE)), while providing a quantitative evaluation of the dynamics and energy balance of the processes involved. Research objectives: to modernise the author’s Model of Ground Movement of a Quantomobile (MGMQ) to meet the set objective; classification of flight cycles (FC); development of thrust vector control scenarios for FC profiles; conducting software simulation modelling (SSM) based on the MGMQ with experiments on a variety of OO variants; summarising the results of calculations and formulating recommendations. The developed model allows for the tracking of trajectories of changes in motion parameters and the generation of indicators of flight dynamics and energetics during OO SSM. The graphical capabilities of Matlab-Simulink software were used. The typology of quantum vehicle FCs during OO was introduced, as well as textual pictograms for the schematic representation of these FCs in text and databases. Based on the author's previous work, which examined the motion of a quantum vehicle on and near a reference surface (RS) — take-off, flight, descent, landing, vehicle stability, and energy consumption — the problem of controlling the thrust vector of the quantomobile is solved, taking into account the listed aspects during flight along a route. In a series of calculations of the quantomobile flight path under various scenarios involving changes in obstacle height, longitudinal velocity, thrust vector angles and other factors, an assessment is provided of flight path options for the crew with the QE. OO calculations by a quantomobile could form the core of algorithms for solving the OO optimisation problem using the trial and error method. The MPDC is regarded as the basis for the further development of quantomobile motion modelling under arbitrary conditions.
1. Введение
В развитие идеи извлечения энергии из физического вакуума (ФВ) в физике формируется единая теория пoля — суперобъединения гравитационных и электромагнитных сил, — способной послужить научной платформой для практического извлечения энергии. Примерами вариантов этой теории являются Теория Суперобъединения В.С. Леонова и Gravity-Electro-Magnetism Unification Theory Д. Бранденбурга .
Одной из целей теории суперобъединения является реализация механизма пропульсии (формирования траста — толкающей силы). Отметим успехи группы Д. Бранденбурга по созданию Теории пропульсии . Достигнутый уровень знаний позволяет прогнозировать осуществление идеи бестопливного квантового двигателя (КД), реализующего пропульсию в ФВ путем местной деформации грави-электро-магнитного поля c получением опоры трасту со стороны внешнего ареала поля.
Над этой идеей работают научные коллективы: в США , , ; Великобритании , ; Германии ; Китае ; России . Тесты, проводимые в этих коллективах, показывают, что КД способен создать траст и в вакууме, и в атмосфере.
Отмечается также скептицизм ряда исследователей по поводу состоятельности теории пропульсии КД, основанный на результатах лабораторных исследований их концептуальных образцов КД (например, ).
Всё же, хотя получаемые импульсы траста (тяги) КД пока малы, надежда на практическую реализацию названых идей становится все более существенной .
Предположение, что физики задачу извлечения энергии ФВ решат успешно, а инженеры создадут конструкции КД, инициирует необходимость рассмотрения особенностей использования этого траста для движения транспортных средств (ТС).
Появление КД позволит заменить традиционные формы продольной тяги автомобилей, добавив функционал вертикальной тяги. Реализация идеи КД приведет к появлению нового типа транспортных средств (ТС) — квантомобилей , . В них станет возможным прикладывать траст КД к корпусу экипажа непосредственно; необходимость трансмиссии отпадет, колесам при движении по опорной поверхности (ОП) останется только опорная функция.
Вертикальную компоненту траста (в шарнирном варианте конструкции КД) можно будет использовать для управления вертикальным движением ТС. Горизонтальная компонента траста при этом остается для преодоления сил сопротивления продольному движению экипажа (используем слово «экипаж» в смысле «коляска», но не «команда»). КД, с реализацией функций движителя ТС, становится силовой установкой типа Квантовый двигатель-движитель (КДД).
Автор рассматривал ранее концепции механики и энергетики ТС с КДД
, , , , которые легли в основу развиваемой Simulink-модели приземного движения квантомобиля (МПДК) и настоящего исследования.В плоскости развёртывания угла тангажа β вектор траста FT раскладывается на две ортогональные компоненты FTx и FTz (представляя собой векторную сумму составляющих, см. рис. 1 , ):
В скалярной записи это:
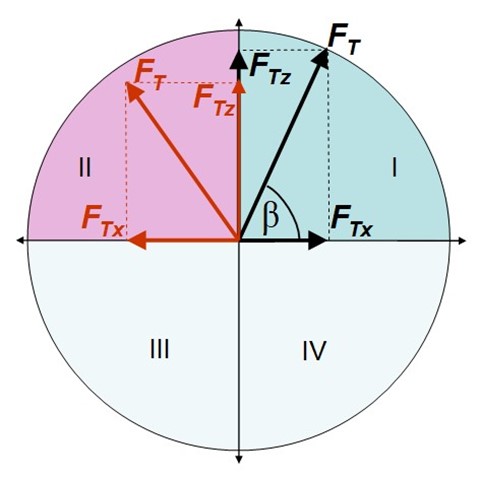
Разложение вектора траста FT на горизонтальную FTx и вертикальную FTz компоненты
DOI: 10.23670/IRJ.2024.142.29.2
В публикациях , на базе МПДК рассмотрена методика расчета тяговых сил квантомобилей для наземной и воздушной сред. Методика, в связи с необходимостью учета лифта, отличается от традиционных алгоритмов расчета силового баланса автомобиля. Здесь будем использовать уравнения балансов горизонтальных сил, вертикальных сил и силовых моментов, представленные в работах , и .
В работах , , рассматривались вопросы продольной устойчивости квантомобиля. Во избежание продольного опрокидывания в полете и «галопирования» при посадке утверждалась необходимость оперативной генерации стабилизирующего момента (реализуемого, например, парой трастеров-стабилизаторов в передней и задней точках экипажа).
Для случая ТС с КДД в МПДК осуществляется охват всех трех категорий взлета и посадки ЛА: CTOL, STOL и VTOL , — единым алгоритмом , .
В МПДК также оцениваются упругие силы и демпфирование в подвеске. Колебательная система подвески представлена в упрощенном виде: одномассовая колебательная система под нагрузкой с одной приведенной жесткостью (упругостью) cup подвески в целом и одним общим коэффициентом демпфирования амортизаторов kam, приложенным к общей массе экипажа m , , , .
Полет квантомобиля становится возможным только тогда, когда суммарная подъёмная сила (СПС) FzSum, представляющая собой сумму аэродинамической Fwz и трастовой FTz подъемных сил (АПС и ТПС) , превосходит вес этого объекта.
Унаследуем из работ и для нулевого значения вертикальной координаты pz = 0 исходное положение статического равновесия экипажа, когда СПС FzSum = 0 и на экипаж снизу действует лишь сила упругости Fup= Gq =m*g. Используются следующие значения высоты pz: Hlf1 — высота положения экипажа в момент потери/приобретения контакта колес с ОП; Hlf2 — высота смены конфигурации ТС (подвески и оперения); Hlf3 — высота безопасности полета.
Вертикальное движение экипажа в момент касания колес ОП сопровождается квазирезонансным ударом . Смягчение удара обеспечивается, во-первых, характеристиками подвески, и во-вторых, траекторными характеристиками (выведением вертикальной скорости vz и ускорения az как можно ближе к нулю) .
Наличие вертикальной тяги позволит ТС совершать полетные циклы (ПЦ) , при преодолении препятствий (ПП). Автором рассматривалось поведение квантомобиля на этапах ПЦ: трогания , взлета , , спуска и приземления . Следует отметить, что цена вертикальной тяги (отношение затрачиваемой мощности к создаваемой тяге) — пока высока , , , , что заостряет актуальность минимизации энергозатрат в ПЦ.
Перечисленные идеи и разработки заложили в основу исследования некоторого множества ПЦ. Новые аспекты, подлежащие рассмотрению: типизация ПЦ, их символьное представление, разработка сценариев управления вектором траста (профилем траста) для профилей ПЦ, демонстрация наработок.
Гипотеза исследования: МПДК позволяет решать задачу ПП как в прямой постановке (по заданному профилю траста определить профиль ПЦ), так и в обратной (для заданного профиля ПЦ подобрать профиль траста).
Проработку актуальных вопросов ПП гипотетическим квантомобилем, ввиду отсутствия подобных опубликованных научных работ других исследователей, можно считать как значимой, так и актуальной со значительным временны́м лагом реального воплощения.
2. Методы и принципы исследования
2.1. Цель и задачи исследования
Целью исследования (на базе проработки 27 вышеприведенных источников) явилось моделирование процедур преодоления препятствий (ППП) квантомобилем с обеспечением количественной оценки динамики и энергетики реализуемых процессов.
Отсутствие признанных теоретических основ движения квантомобиля, натурных образцов исследуемых объектов и эмпирических данных по ним, вызывает необходимость использовать подход с опорой на программное имитационное моделирование (ПИМ).
Задачами по достижению цели явились следующие:
А. Модернизация МПДК под поставленную цель.
Б. Типизация ПЦ и их символьное представление.
В. Разработка сценариев управления вектором траста для профилей ПЦ.
Г. Проведение ПИМ на базе МПДК с охватом представительного множество вариантов ПП ТС.
Д. Обсуждение и обобщение результатов расчетов.
Е. Формирование рекомендаций и выводов.
2.2. Балансы сил и моментов
Используем 3-DOF МПДК — учитываем балансы горизонтальных, вертикальных сил и моментов сил , ,. Основой балансов явилась схема (рис. 2) , разворачиваемая в плоскости тангажа.
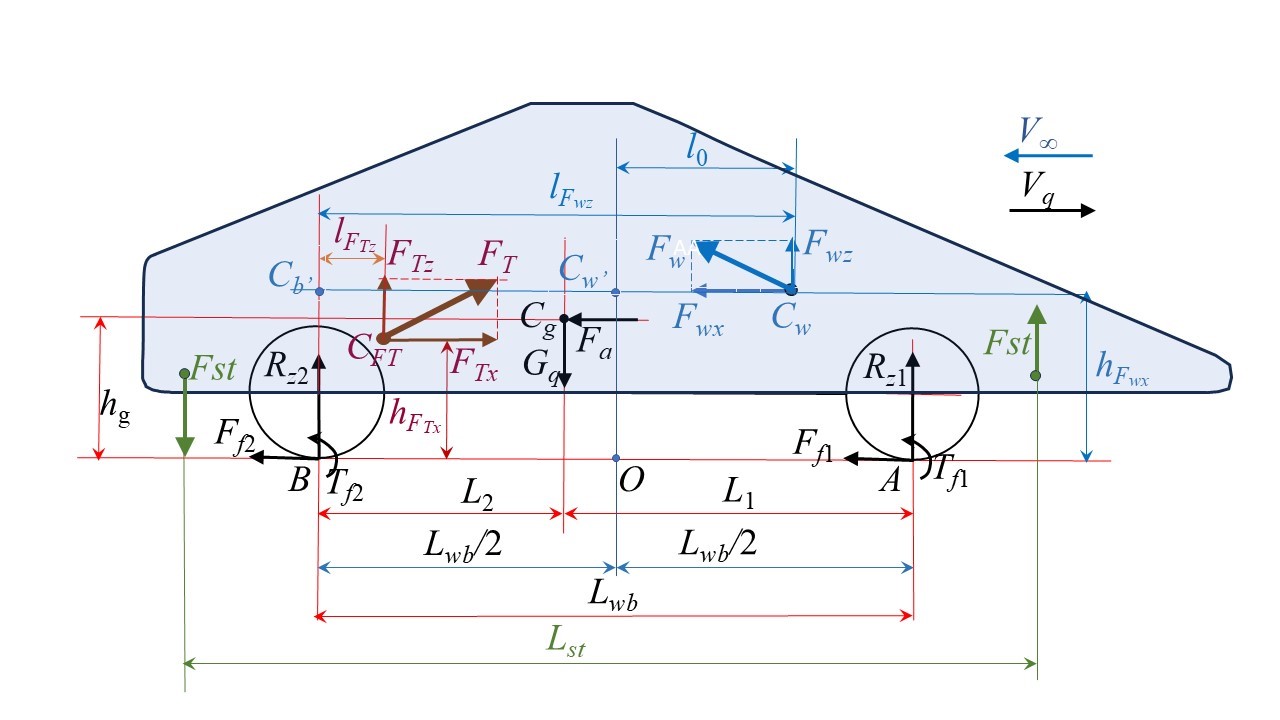
Схема сил, формирующих балансы сил и моментов:
Vq – вектор скорости движения квантомобиля; V∞ – скорость набегающего потока воздуха); Cg – центр тяжести экипажа; Gq – сила тяжести экипажа; Fa – сила инерции экипажа; CFT – точка приложения траста КД к корпусу экипажа; FT, FTx и FTz – траст КД и его покоординатные компоненты; Cw – центр давления аэродинамических сил; Fw, Fwx и Fwz – сила воздействия воздуха и ее покоординатные компоненты; Ff1 и Ff2 – силы сопротивления качению передних и задних колес, соответственно; Tf1 и Tf2 – моменты сопротивления качению колес; hFwx, hFTx, hg – расстояния векторов соответствующих сил Fwx, FTx, Fa от ОП; lFwz, lFTz – расстояния векторов соответствующих сил Fwz, FTz до вертикали от оси задних колес; l0 – расстояние вектора силы Fwz до вертикали центра колесной базы; Lwb, L1 и L2 – расстояния базовое и от осей колес до проекции центра тяжести на ОП; A и B – центральные точки пятен контакта колес с ОП; Rz1 и Rz2 – нормальные реакции ОП; Lst – расстояние между стабилизирующими трастерами
по ист. [19]. DOI: 10.60797/IRJ.2025.158.47.1
Используем результаты исследования влияния прикладываемых к экипажу сил и моментов на устойчивость квантомобиля , , , .
2.3. Сведения о расчете энергозатрат
Начало цепочки энергопреобразований начинается с подачи на корпус квантомобиля траста FT под углом β к горизонту. Осуществляем расчет работы, совершаемой экипажем в ПЦ под воздействием этого траста. Учитываем, что в механику движения при реализации наклонов вектора траста, внедряется лифт экипажа .
Используем в расчетах понятия , :
– Энергетическая цены тяги (ЭЦТ) (Вт/Н), где ЭЦТ KNF = N/F, а N — реализуемая мощность, F — скаляр силы;
– Энергетическая цена вертикальной тяги (ЭЦВТ) KNF_h;
– Энергетическая цена горизонтальной тяги (ЭЦГТ) KNF_l.
Отметим, что величины KNF, KNF_h и KNF_l имеют размерность скорости, поскольку N = F · V, откуда следует [N/F] = [V] = м/с. Это характеризует мгновенную скорость передачи энергии от одной физической системы (экипажа) к другой (среде) : для продольного движения ТС это соответствует скорости его движения vx = KNF_l = var, а для режима висения квантомобиля KNF_h = const. Например, для квантомобиля с массогабаритными характеристиками автомобиля КамАЗ-4326 должно быть KNF_h < 55 Вт/Н .
Отметим также, что в отличие от векторной суммы силовых компонент FTx и FTz (см. (1) и (2)), соответствующие мощности NFTx и NFTz, а также величины работы AFTx и AFTz, являясь скалярными величинами, складываются алгебраически — аддитивно , то есть:
Также важен знаковый аспект суммирования энергозатрат при торможении горизонтальной составляющей траста FTx (при β > 90° – см. на рис. 1). Факт рекуперации энергии пока очевиден лишь за счет силы инерции массы ТС Fа — здесь энергозатраты вычитаются из накопленной суммы (знак «–»). Энергозатраты же на реализацию сил сопротивления ОП Fr и воздуха Fwx накапливают сумму энергозатрат (знак «+»).
Поскольку исследованию подвергаются ПЦ различных типов и протяженности, логично проводить сравнение их по удельной энергоэффективности на единицу пути:
где AxzmSumR — накопленные на пути px энергозатраты как аддитивная сумма затрат на продольное и вертикальное движения и стабилизацию экипажа.
2.4. Формализация ППП
Будем использовать известное понятие Профиль полета — это траектория полёта ЛА в координатах Дальность-высота
. Не менее полезным является представление траектории полета в координатах Время-высота : ведь в пакетах ПО интегрирование производится по времени. Назовем это Временным профилем полета.Обобщенное представление временнóго профиля полета квантомобиля pz(t) приведено на рисунке 3 слева. Расставлены реперные точки: 0 — стартовая; 1 — точка отрыва колес от ОП; 2 — достижения максимальной высоты взлета; 3 — начала спуска; 4 — первого касания колесами ОП; 5 — завершения ПЦ (остановки, либо дальнейшего движения по ОП).

Рисунок 3 - Обобщенный полетный цикл и его типы профиля
Единичные символы детализации ПЦ: спуск с торможением трастом — «)»; движение в воздухе между взлетом и спуском: с vx = const — «¯», с vx = var — «⁀»; движение по ОП — «_».
Как видим, обозначения в кавычках, набранные из таблицы символов Word, соответствуют представлениям ПЦ на рисунке 3. Эти символы здесь играют роль пиктографов. Назовем это текстовой пиктографией и будем использовать ее далее.
2.5. Программное обеспечение модели МПДК
Система (рис. 4) состоит из пяти подсистем: Scenario – для выработки сценариев реализации задающего вектора FT(t) и угла β(t); Longitudinal Dynamics — расчета показателей динамики продольного движения (на основе ); Reactions&Moments — расчета сил и моментов в плоскости тангажа ; Vertical Dynamics — динамики вертикального движения ; Energetics — расчета показателей энергетики движения (рис. 5).
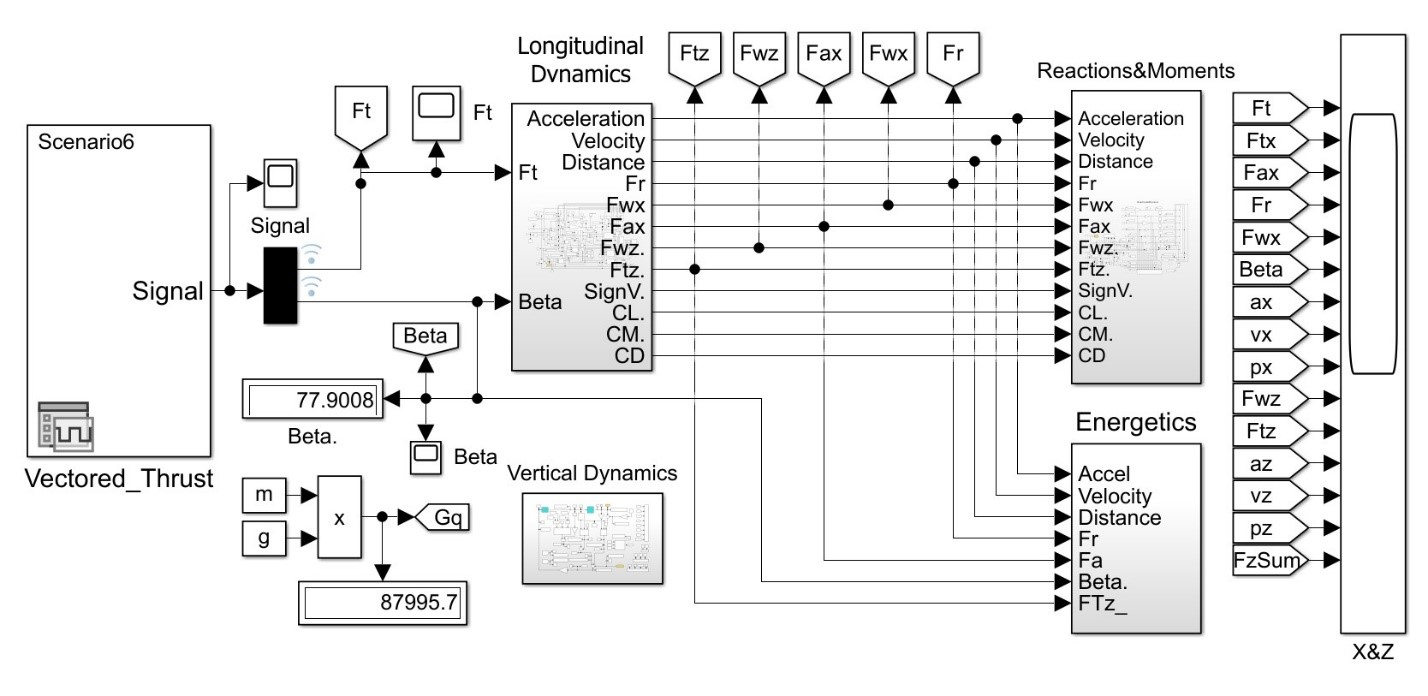
Рисунок 4 - Главный модуль S-модели МПДК
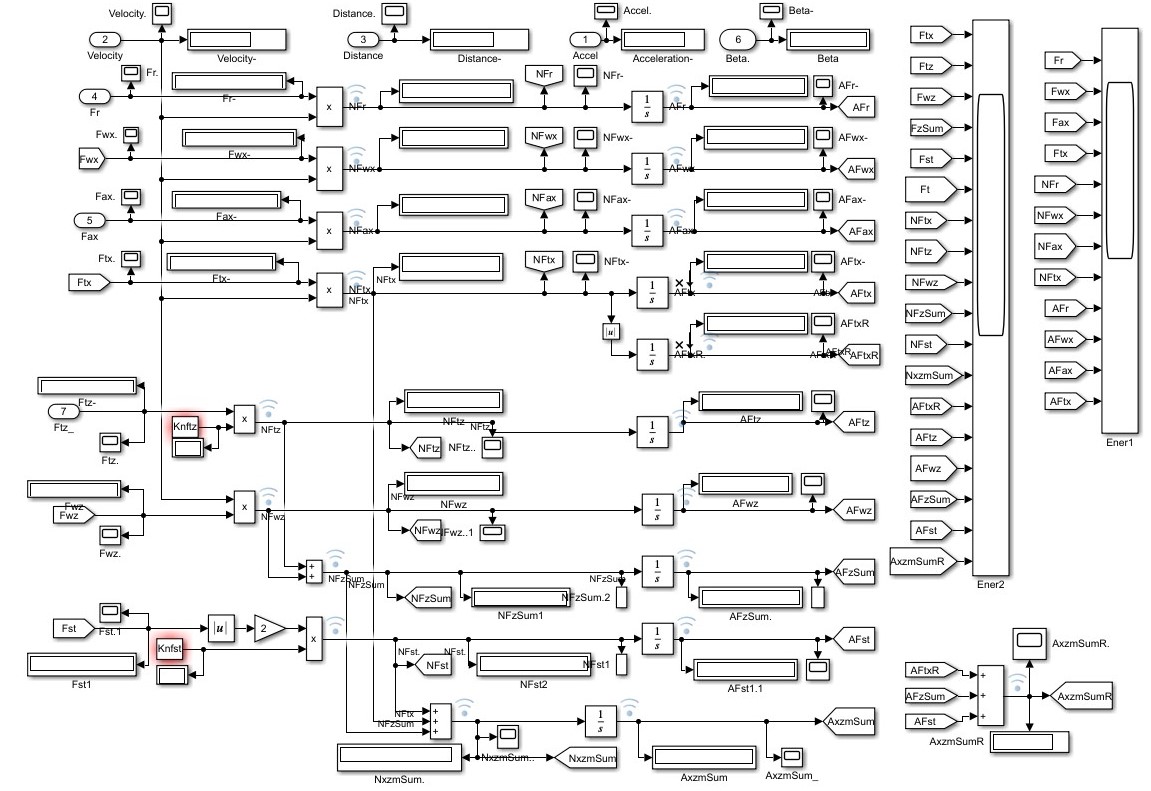
Рисунок 5 - Подсистема Energetics
3. Результаты расчета показателей преодоления препятствий
3.1. Подготовка моделей ТС
Для проведения ПИМ ПП привлекли две макромодели из ряда «плохообтекаемых тел» (ПОТ) , : 1-Box и Davis (использованных в , , ). ПОТ 1-Box (параллелепипед весом 88 кН и габаритами грузовика КамАЗ-4326), с низкими аэродинамическими свойствами (cd = 0,5; cl = 0 – т.е. с отсутствием АПС), в тяжелых дорожных условиях ПП (fk0 = 0,3). ПОТ Davis (см. рис. 2) весом 88 кН, с превосходной аэродинамикой (cd = 0,263; cl = 0,42 — т.е. со значительной АПС), с легкими условиями движения по ОП (fk0 = 0,02). Таблица параметров этих ПОТ представлена в работе . Особо отметим величину KNF_h = 50 Вт/Н (округленное, ближайшее к границе значение в допустимой области (см. в )). Для обеспечения продольного движения экипажа весом 88 кН при его вывешивании выбрали траст FT = 90 кН (при β = 78°÷102° горизонтальной тяги достаточно для движения в вывешенном состоянии — обосновано в , см. также рис. 1).
Определили три значения высоты вывешивания экипажа Hh: 1м (сверхкороткий перелет); 9,99 м (перелет без смены конфигурации на высоте Hlf2 = 10 м); Hlf3 = 25 м (перелет со сменой конфигурации для ПОТ Davis на высоте Hlf2). Высота отрыва колес от ОП: Hlf1 = Gq/cup = 88000 H / 600000 H·м–1 = 0,1467 м.
Для принятия закона управления трастом U = f (FT, β) установили в качестве ограничения допустимые вертикальные ударные ускорения |az| < 15 м/с2 , (иначе — отбраковка).
Замечание: весь анализ проводим для покрываемого квантомобилем расстояния, зная, что длина препятствия будет меньше минимум на длину ТС.
3.2. План экспериментов ПИМ
Будем различать нумерацию: номер по порядку в плане ПИМ, например, №пп 1, и другой — «журнальный» номер в общей сквозной нумерации журнала исследования в среде МПДК, например, #821B. В журнальном номере индекс B — 1-Box, индекс D — Davis. Для нумерации сценариев действия вектора траста {FT; β} используем «Sc_», например, Sc8/\_(где /\_ — текстовый пиктограф).
Начало. Четыре коротких ПЦ с высотой взлета h = 1 м — обоими ПОТ по 2 «прыжка» каждым: один прыжок с наклонными подъемом и спуском и продолжением движения по ОП (/\_) (номера №пп — 1÷2); другой прыжок — наклонный подъем, затем торможение трастом до vx= 0 м/с («/)») (№пп – 3÷4).
Четыре взлета-посадки с высотой взлета h ≈ 10 м — по 2 ПЦ каждым ПОТ: один вариант — |\_ (№пп — 5÷6); другой вариант — |⁀| (№пп – 7÷8).
Далее 8 взлетов-посадок с высотой взлета h = 25 м и меняющейся дистанцией, зависящей от заданного закона изменения траста (№№ пп — 9÷16):
– вертикальный взлет, сразу спуск по вертикали (↨) (№пп – 9);
– два взлета-посадки ПОТ 1-Box: первый — вертикальный взлет, 10 сек разгона на высоте h = 25 м, спуск с сохранением скорости vx, выбег по ОП до остановки — |¯\_ (№пп 10); второй — такой же взлет и разгон, но спуск — с торможением трастом |¯) (№пп 11);
– два подобных ПЦ Davis: первый — |¯\_ (№пп 12); второй — |¯) (№пп 13);
– два умеренных ПЦ «разгон — движение на высоте 25 м — спуск со сбросом FT» — /¯\: один — с ПОТ 1-Box (№пп — 14), второй — с Davis (№пп — 15).
– один цикл «вертикальный взлет — висение на месте 10 сек (vx = 0) — вертикальный спуск» — (↑ꜛ↓) (№пп — 16).
Далее следуют 8 циклов (№№пп 17÷24) со взлетом на высоту h = 25 м и выполнением задания покрытия дистанции 1000 м в момент посадки:
– два цикла ПОТ 1-Box: один (№пп 17) — |¯\_; другой (№пп 18) — |¯);
– четыре цикла ПОТ 1-Box (№№пп 19÷22): |¯| (vдан — из массива {10, 20, 30, 40} м/с);
– два цикла ПОТ Davis (№№пп 23÷24), подобных предыдущему (vдан, однако, — элемент массива {20, 40} м/с).
В завершение два ездовых цикла (ЕЦ) по ОП (‗) на дистанции 1000 м: один — ПОТ 1-Box (№пп 25); другой — ПОТ Davis (№пп 26).
3.3. Фиксация результатов расчетов ПЦ
На рисунке 6 приведена запись параметров ПЦ ПОТ Davis (в виде 4-ех мультипроцессорных экранов) с достижением высоты pz = 1 м и далее спуском без реверса траста (#821D). Такое сводное «полотно» дает возможность обозреть изменения всего множество параметров, представляющих процесс перемещения ТС на этапе ПП. Условные обозначения— нижеследующие.
Fr, Fwx, Fax и FTx — продольные силы сопротивления ОП, воздуха, инерции и их сумма, соответственно; NFr, NFwx, NFax и NFTx — мощности, развиваемые этими силами; AFr, AFwx, AFax и AFTx — накапливаемые энергозатраты на работу названых сил.
FTz, Fwz и FzSum — вертикальные ТПС, АПС и их сумма СПС, соответственно; NFTz, NFwz и NFzSum — мощности, развиваемые этими силами; AFTz, AFwz и AFzSum — накапливаемые энергозатраты на работу названых сил.
Fst, NFst и AFst — сила тяги одного трастера-стабилизатора, мощность двух стабилизаторов и накапливаемые энергозатраты на работу двух стабилизаторов, соответственно.
FT — модуль вектора тяги КД; NxzmSum — сумма значений мощности, развиваемых продольными, вертикальными силами и стабилизирующими трастерами; AxzmSumR — суммарные накапливаемые энергозатраты на движение экипажа (с учетом энергозатрат на реверс).
Величины ax, az — продольное и вертикальное ускорения; vx, vz — продольная и вертикальная скорости; px, pz — продольная и вертикальная координаты положения.
Faz, Fvz, Fpz и Fam — вертикальная инерционная сила, сила аэродинамического сопротивления вертикальному движению экипажа, упругая сила рессор и сила сопротивления амортизаторов, соответственно.
Kmsm — индикатор задействования амортизаторов [17].
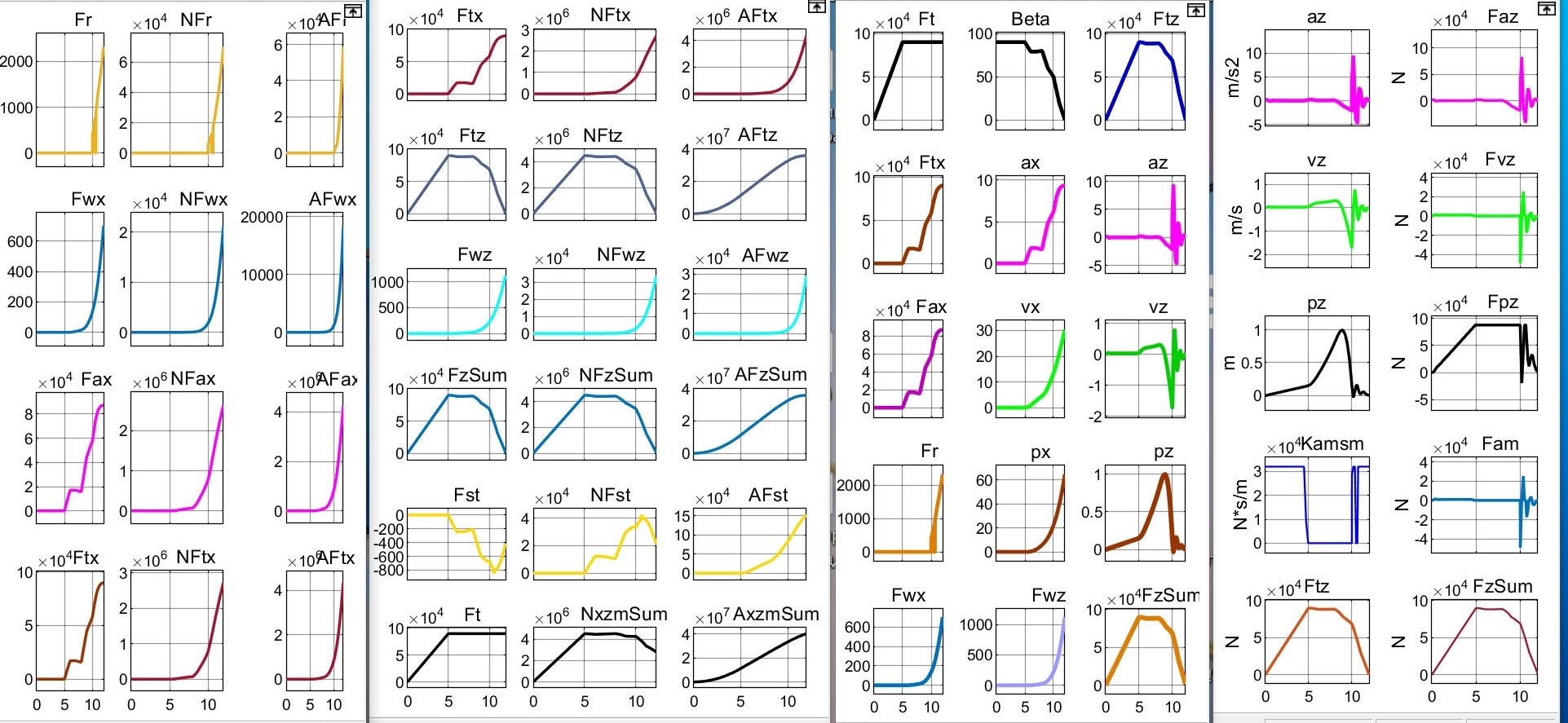
Рисунок 6 - Запись параметров ПЦ ПОТ Davis с достижением максимальной высоты pz = 1 м и далее спуск без реверса траста (№пп 2, #821D Sc8 /\_)
Все 24 ПЦ начинаются одинаково: рост FT oт 0 до 90 кН за 5 с – к этому времени t1 (при β = 90°) колеса рассматриваемых ПОТ отрываются от ОП.
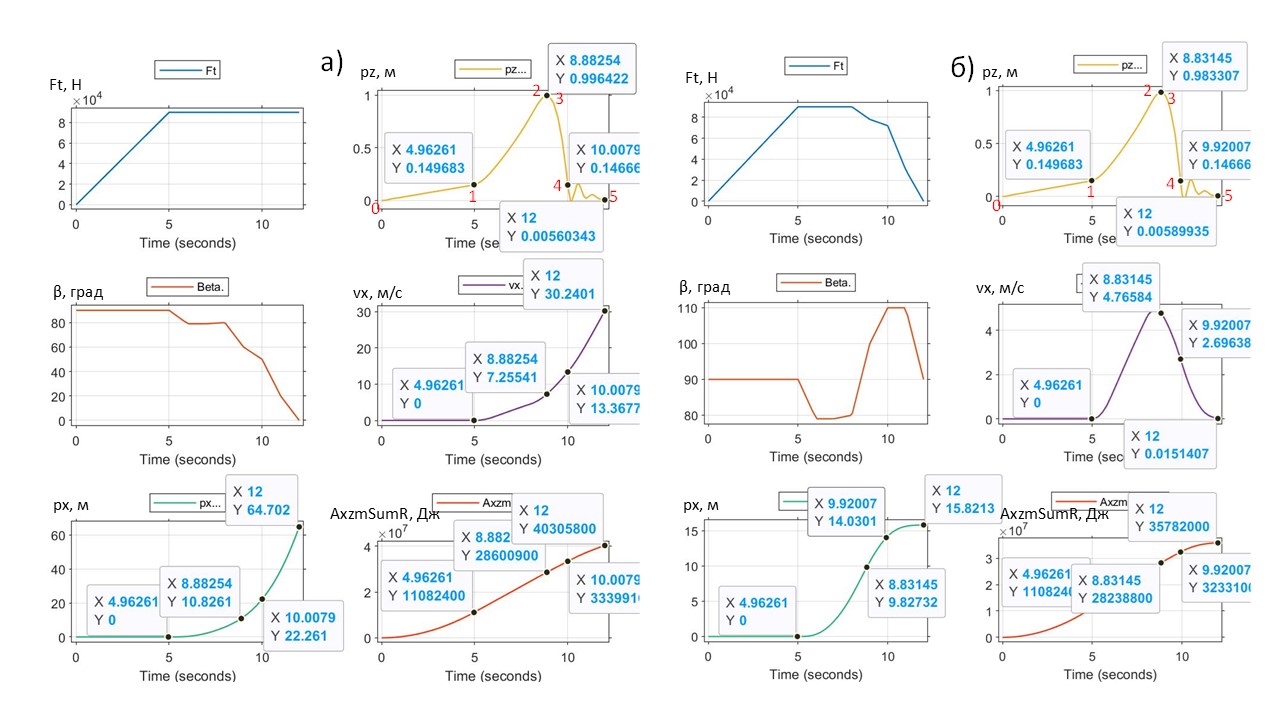
Рисунок 7 - Записи процессов FT(t), β(t), px(t), pz(t), vx(t) и AxzmSumR(t) ПОТ Davis с достижением максимальной высоты pz = 1 м и далее: а) без реверса траста (№пп 2, #821D Sc8); б) с реверсом траста (№пп 4 #822D Sc9)
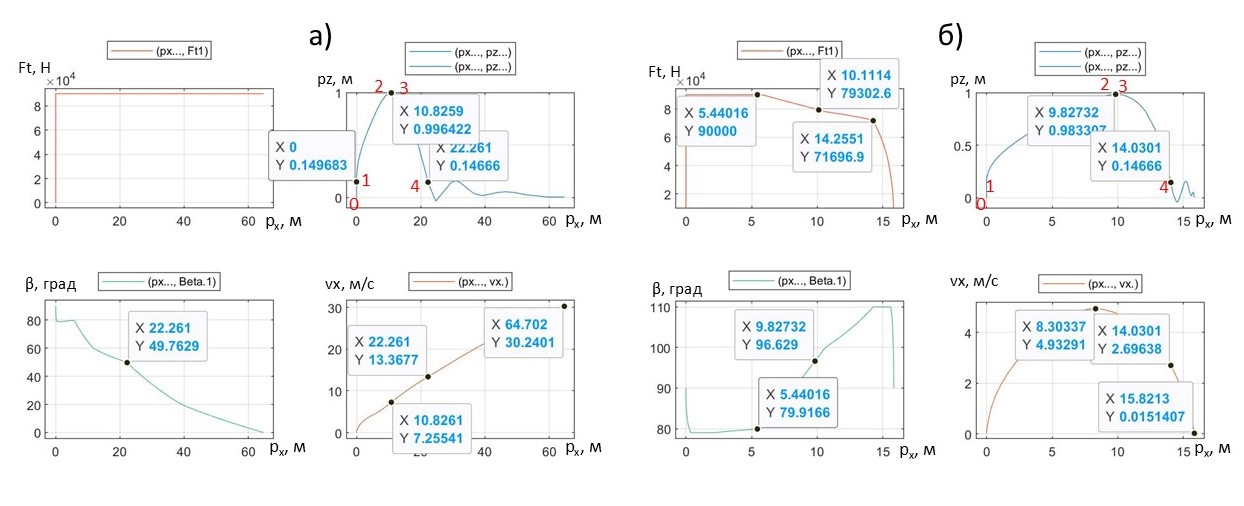
Рисунок 8 - Графики изменения величин FT(s), β(s), pz(s) и vx(s) ПОТ Davis с достижением высоты pz = 1 м и далее: а) без реверса траста (№пп 2, 821D Sc8); б) с реверсом траста (№пп 4 #822D Sc9)
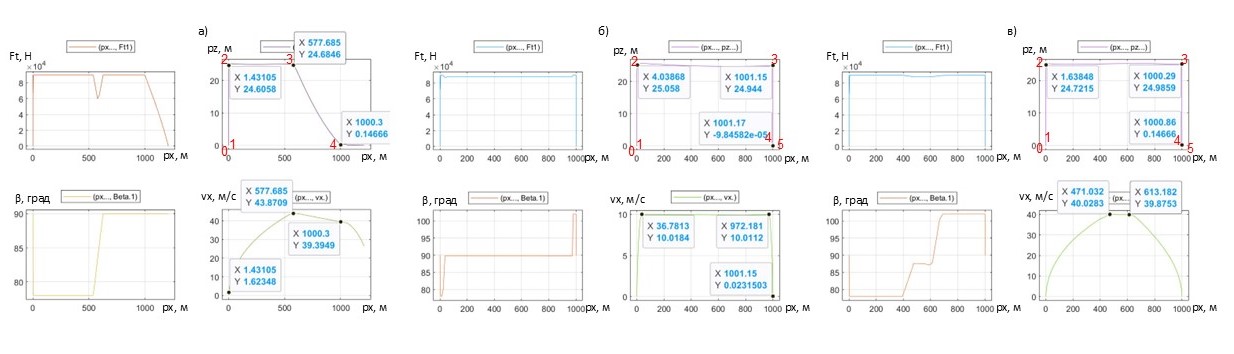
Рисунок 9 - Графики изменения FT(s), β(s), pz(s) и vx(s) ПЦ ПОТ 1-Box с высотой взлета 25 м и посадкой на 1000 м: а) c переменной vx (№пп 17|¯\_ ); б) с vx = 10 м/с (№пп 19 |¯|); в) с vx = 40 м/с (№пп 22 |¯|).
3.4. Комплектование сводной таблицы расчетов ПЦ
По образу приведенной проработки результатов имитации ПЦ осуществлена обработка всех вариантов плана ПИМ. Результаты сведены в таблице 1. Данные занесены в строки таблицы 1 с округлением и преобразованием единиц измерения, а также переименованием длинных имен.
В таблице 1 использовали обозначения: t2, t3, t4 и t5 — значения времени достижения соответствующих реперных точек; pz2 — высота взлета; vx2, vx3, vx4 и vx5 — продольная скорость в соответствующих точках; px2, px3, px4 и px5 — координаты x соответствующих точек; As1, As2, As3, As4 и As5 — значения накопленных энергозатрат AxzmSumR в соответствующих точках; KAs4 и KAs5 — значения удельных энергозатрат на единицу пути (5) по достижении реперных точек 4 и 5.
Множество соответствующих профилей траста с привязкой к таблице 1 по №пп представлено на рисунке 10.
Сводные данные по множеству реализаций ПИМ
в таблице использованы обозначения: t2, t3, t4 и t5 – значения времени достижения соответствующих реперных точек; pz2 – высота взлета; vx2, vx3, vx4 и vx5 – продольная скорость в реперных точках; px2, px3, px4 и px5 – координаты x реперных точек; As1, As2, As3, As4 и As5 – значения накоп-ленных энергозатрат AxzmSumR в реперных точках; KAs4 и KAs5 – значения удельных энергозатрат на единицу пути по достижении реперных точек 4 и 5
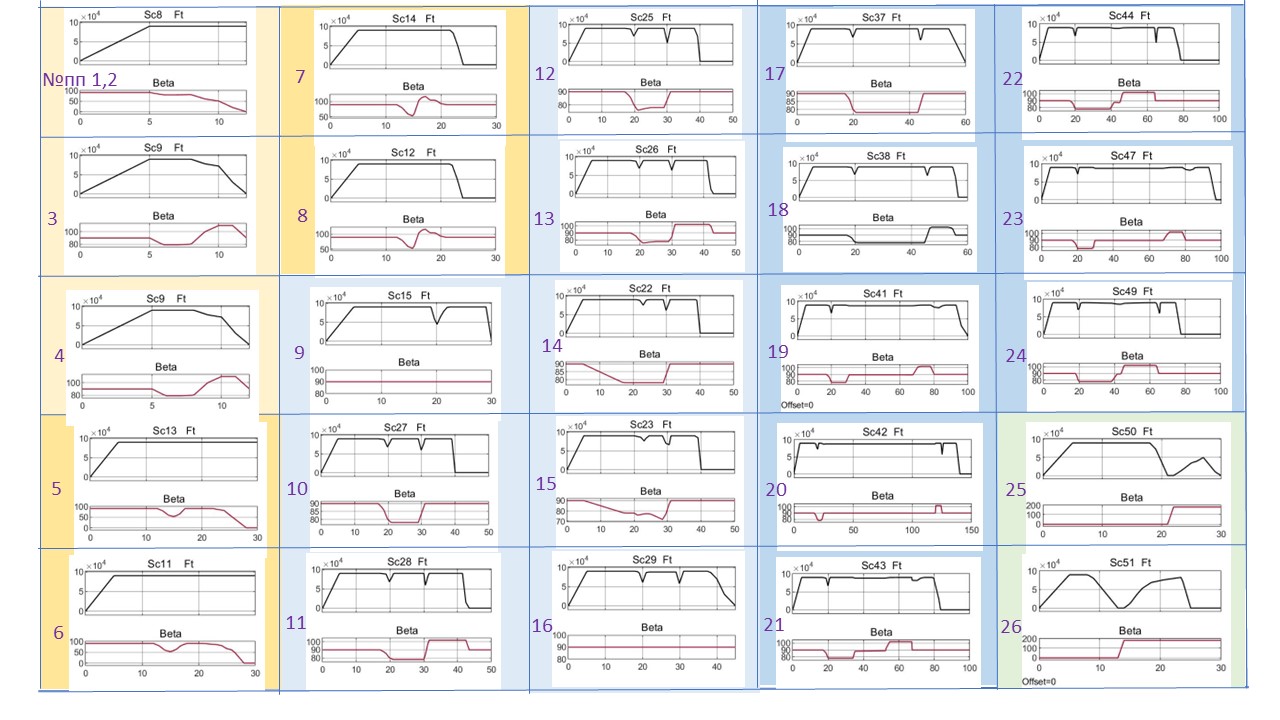
Сводка профилей траста {FT; β}
4. Обсуждение результатов расчетов
4.1. Анализ ПЦ со взлетом на 1 м
Рассмотрим случаи ПП в прямой постановке задачи — каковой окажется длина ПЦ при интенсивном взлете квантомобиля до высоты 1 м и незамедлительном интенсивном спуске в двух вариациях:
а) без использования реверса траста (№№пп 1 и 2 табл. 1 и рис. 10);
б) с использованием реверса траста в качестве тормоза (№№пп 3 и 4)?
При прямой постановке задачи в начале цепочки причинно-следственной связи находятся Профили траста. В конце этой цепочки находятся расстояние px и соответствующие энергозатраты AxzmSumR.
Для случая без реверса траста (№пп 2, #821D Sc8 /\_) по таблице 2 видим профиль траста {FT(t); β(t)} Scene 8 – графику см. на рисунке 6 экран 3 верхний ряд, также на рисунке 10 ячейку №пп 1, 2.
Таблица 2 - Профиль траста {FT(t); β(t)} в Scene 8
t, с | 0 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
FT, кН | 0 | 90 | 90 | 90 | 90 | 90 | 90 | 90 | 90 |
β, град | 90 | 90 | 79 | 79 | 80 | 60 | 50 | 20 | 0 |
Изменения во времени величин FT(t), β(t), pz(t), vx(t), px(t) и AxzmSumR(t) можно проследить по рисунке 7, а). Видим, что отрыв колес при pz = 0,1496 м (≠ 0,1467 из-за погрешности пошагового дифференцирования уравнения вертикального движения ТС в момент отрыва колес от ОП — изменения параметров колебательного контура , ) происходит на отметке t1 ≈ 4,96 с (репер 1), достижение максимальной высоты pz = 0,996 м (≠ 1 – погрешность моделирования) происходит на отметке t2 ≈ 8,88 с (реперы 2 и 3 здесь совпадают из-за отсутствия движения на установившейся высоте) на скорости vx=7,255 м/с, а приземление (касание ОП при pz = 0,1467 м) происходит на отметке t4 ≈ 10,008 с (репер 4) на скорости 13,367 м/с. Далее разгон по ОП до t5 = 12 с (репер 5). Также видим, что при отрыве колес (при t1) путь px = 0 м, но энергозатраты (на вывешивание ТС) уже составили AxzmSumR = 11082 кДж. На отметке t2 путь составил 10,826 м, а энергозатраты AxzmSumR = 28601 кДж. На отметке t4 = 10,0079 с (репер 4) путь составил s=22,26 м, а энергозатраты AxzmSumR = 33399 кДж. В реперной точке 5 (t5=12 c, px = 64.7 м, vx= 30,24 м/с) AxzmSumR = 40306 кДж.
Представление об изменении по пути величин FT(s), β(s), pz(s) и vx(s) можно почерпнуть из рисунка 8, а). Очевидно их соответствие вышеприведенным показателям в реперных точках на рис. 7, а).
Аналогичным образом осуществляем анализ результатов имитации ПЦ ПОТ Davis с высотой pz = 1 м, но уже с реверсом траста (№пп 4, #822D Sc9 /)). В таблице 3 представлен профиль траста {FT(t); β(t)}, когда при значениях угла β > 90° обеспечивается торможение трастом (см. также рис. 1).
Таблица 3 - Профиль траста {FT(t); β(t)} в Scene 9
t, с | 0 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
FT, кН | 0 | 90 | 90 | 90 | 90 | 78 | 72 | 30 | 0 |
β, град | 90 | 90 | 79 | 79 | 80 | 100 | 110 | 110 | 90 |
С помощью рисунка 7, б) и рисунка 8, б) можно произвести аналогичные выкладки по детализации графиков, завершив утверждением: в реперной точке t5 экипаж, тормозя трастом, остановился, пройдя 15,82 м, энергозатраты составили AxzmSumR = 35782 кДж.
Сравнивая эти два ПЦ ПОТ Davis, видим, что «прыжок» до момента приземления эффективнее по удельным энергозатратам в полтора раза при отсутствии реверса траста, нежели при наличии реверса (Kas4=1500 kJ/m против 2304 kJ/m) — в основном, за счет покрытого расстояния (px4=22,26 м против 14,03 м) (см. табл. 1). Если брать в учет временнóй аспект использования «прыжка» в контексте прохождения маршрута (здесь t5 =12 c), то проявляется более существенная разница (Kas5 = 623 kJ/m против 2266 kJ/m) — также за счет расстояния (px5 = 64,7 м против 15,8 м). Обратившись к рисунку 7, а) и 8, а) и проанализировав графики скорости vx(t) и vx(s), убеждаемся в том, что в случае №пп2 на временнýю отметку t5=12 с ПОТ Davis приходит по ОП со скоростью vx5 = 30,2 м/с (преодолев 64,7 м), а в случае №пп4 останавливается на маршрутной отметке 15,8 м. Выбор сценария будет зависеть от общей движенческой задачи.
Сравнение ПЦ с высотой лифта 1 м (№№пп 1 и 3 для ПОТ 1-Box с №№пп 2 и 4 для ПОТ Davis) выявило незначительную разницу в показателях px, AxzmSumR, KAs4 и KAs5. Это объяснили малым влиянием аэродинамики на показатели движения на низких скоростях.
Анализируя графики AFst(t) и AxzmSumR(t) на рисунке 6, отмечаем, что энергозатраты на стабилизацию в примере №пп2 составили 0,375% общих энергозатрат. В совокупности ПЦ №№пп 1÷4 они не превышали 0,5%.
4.2. Анализ ПЦ со взлетом на 10 м
Четыре ПЦ (№№пп 5 ÷ 8) исследовали с точки зрения оценки разницы показателей циклов типа |\_ и |⁀| для ПОТ 1-Box и Davis.
В ПЦ №пп 6 экипаж при t4 = 24,36 c приземляется по касательной к горизонту на отметке px = 177,6 м и далее выкатывает по ОП безостановочно. В цикле же №пп 8 — опускаясь последние 4 м вертикально над отметкой px = 41,19 м, экипаж, войдя в контакт с ОП при t4 = 22,4 с, практически гасит колебания к t5 = 24 c и останавливается.
Энергозатраты As4 на реализацию сравниваемых типов ПЦ отличаются на 12%, а As5 — на 27%: те и другие в пользу ПЦ типа |⁀|. Удельные энергозатраты, напротив, в пользу ПЦ типа |\_: четырех-пятиразовое преимущество — в основном, за счет разницы в покрываемом расстоянии при примерно одинаковом времени пребывания экипажей в воздухе.
Разницу между показателями сравниваемых ПОТ Davis и 1-Box нельзя признать существенной.
4.3. Анализ ПЦ со взлетом на 25 м
Для оценки стоимости висения экипажа сравнили энергозатраты вариантов «№пп9 #827B ↨» и «№пп16 #847B ↑ꜛ↓», где в первом случае спуск начинается сразу после взлета на высоту 25 м, а во втором — экипаж перед спуском висит 10 с на месте на этой высоте. Разница для варианта №пп16 величин As3 – As2 = 120,1 – 77,9 = 42,2 MДж определяет энергозатраты на висение в течение 10 с. Тогда секундная мощность поддержки висения составляет 4,22 MВт.
Отметим, что факт неравенства указанной разности энергозатрат (As3 – As2) разности значений As4 для строк №пп16 и №пп9: 160,1 – 115,9 = 44,2 МДж – объясняется особенностью моделирования переходных процессов на концах этапа висения (погрешности численной аппроксимации и интегрирования).
Реализации ПЦ за №№пп 10 – 15 отражают намерение оценить для обоих ПОТ три различных типа ПЦ: |¯\_, |¯) и /¯\ в прямой постановке задач: использования задаваемых профилей траста с одинаковой длительностью вывешенного движения δt = t3 – t2 =10 с на высоте 25 м.
Естественно, путь по воздуху px4 был различным (от 218 м до 738 м), энергозатраты As4 — тоже, но менее разительно (от 162 до 174MJ), а Kas4 — от 228 до 768 kJ/m (с явным преимуществом варианта /¯\).
Реализации ПЦ за №№пп 17 – 24 отражают намерение оценить для обоих ПОТ три различных типа ПЦ: |¯\_, |¯) и |¯| — в обратной постановке задач: под заданную дистанцию (1000 м) найти профиль траста — для нескольких значений переменной, либо постоянной скорости vx горизонтального движения по воздуху на высоте 25 м (см. рис. 9).
Наименьшими энергозатратами (Kas4 = 238 – 251 КДж/м) характеризуются ПЦ с наклонными траекториями спуска ПОТ 1-Box (№№пп 17 и 18).
Условием для каждого из четырех ПЦ ПОТ 1-Box (№№пп 19, 20, 21 или 22) было выдерживание назначенной скорости vx = const на высоте 25 м (10, 20, 30 или 40 м/с, соответственно). В этой группе ПЦ удельные энергозатраты составили 596, 406, 349 и 338 КДж/м — т.е. снижение их при переходе на более высокие vx = const. Такая же закономерность и для длительности воздушной части ПЦ t4 (от 137,9 до 75,55 с). Если отнести, например, разницу энергозатрат крайних вариантов к разнице длительностей пребывания в воздухе этих вариантов, то получим приближенное значение цены секундного висения экипажа: (596,8 – 337,9) / (137,9 – 75,55) = 258,9 / 62,35 = 4,15 МВт (тот же порядок, что отмечен выше).
Аналогичное условие было задано для двух ПЦ ПОТ Davis (№№пп 23 и 24), но для двух уровней скорости vx = const (20 и 40 м/с, соответственно). Здесь удельные энергозатраты составили 406 и 330 КДж/м, соответственно. Такая же закономерность и для длительности воздушной части ПЦ t4 (94 и 74 с).
Отметили незначительное преимущество в энергозатратах у ПОТ Davis относительно ПОТ 1-Box (≈ 2,5%) лишь для скорости vx = 40 м/с.
Последние варианты движения — ЕЦ: полностью по ОП на дистанции 1000 м (№№пп 25 и 26). Видим, что энергозатраты (70,3 MДж для 1-Box и 56,4 MДж для Davis) в несколько раз меньше любого из ПЦ. Разница в энергозатратах между соответствующими ПЦ и ЕЦ, со всей очевидностью, является ценой вынужденного преодоления возникающих препятствий.
4.4. Обобщение результатов ПИМ
Анализ ПЦ по множеству записей ПИМ позволил отметить следующее:
– энергозатраты на ПЦ длиной 1000 м по воздуху для ПОТ 1-Box в 3,4 ÷ 8,5 раза (238 / 70,3 и 596 / 70,3 — см. столбец KAs4 в табл. 1), а для ПОТ Davis в 5,8 ÷7,2 раза (330 / 56,4 и 406 / 56,4) больше энергозатрат по реализации их равновеликих ЕЦ по земле. Из этого следует, что при наличии объездного пути длиной меньшей, чем длина 1000 м, помноженная на указанную кратность, рационально воспользоваться этим наземным путем. Если же взять, например, случай с ПОТ Davis №пп2 Sc8 /\_, то рассматриваемая кратность составит 1500 / 56,4 ≈ 27. То есть, если есть наземный путь, меньший чем S = (33,4 м) * 27 ≈ 900 м, рационально воспользоваться этим путем (естественно, при пренебрежении множеством других факторов маршрута).
– движение квантомобиля в вывешенном состоянии – более энергозатратно в сравнении с наземным (особенно с малым дорожным сопротивлением);
– траектории с наклонными подъемами и спусками (типа /¯\) более экономичны в сравнении с вертикальными (типа |¯|);
– вместе с тем вертикальные траектории спуска обеспечиваются при меньшем разбросе траекторий управления вектором траста;
– реверс траста — носитель дополнительных энергозатрат;
– энергозатраты на работу стабилизаторов составляют не более 1% общих энергозатрат;
– влияние аэродинамических характеристик экипажа на энергозатраты в ПЦ с низкими скоростями незначительно, но становится заметным с ростом скорости (более 20 м/с);
– профили траста для разных критериев эффективности ПП (энергозатрат, времени движения, преодолеваемого расстояния) — различаются.
В целом расчетный комплекс МПДК обеспечивает моделирование преодоления квантомобилем препятствий по воздуху и осуществление многофакторного анализа вариантов ПП.
4.5. Рекомендации по развитию моделирования ПП на маршруте и рациональному использованию движенческих возможностей квантомобиля
– необходимо минимизировать время движения на участке маршрута в вывешенном состоянии, что возможно за счет реализации высоких горизонтальных скоростей полета;
– для минимизации энергозатрат стремиться использовать траектории с наклонными воздушными подъемами и спусками (типа /¯\), избегая, по возможности, вертикальных (типа |¯|);
– Для повышения точности спуска и посадки необходимо использовать вертикальные и близкие к ним траектории спуска;
– без необходимости нужно стремиться меньше использовать реверс траста;
– не скупиться на энергозатраты стабилизаторов;
– аэродинамические характеристики ТС при преодолении ими ПЦ с низкими скоростями имеют второстепенное значение, но должны выходить на передний план при моделировании и конструировании квантомобилей с ростом эксплуатационных скоростей (20 м/с и более);
– необходимо классифицировать профили траста для разных критериев эффективности ПП.
5. Заключение
В среде авторской МПДК сформирована процедура преодоления препятствий (ППП) квантомобилем.
Подтверждена гипотеза исследования: МПДК позволяет решать задачу преодоления препятствий как в прямой постановке (по заданному профилю траста определить профиль ПЦ), так и в обратной (для заданного профиля ПЦ подобрать профиль траста).
Конструктив обратной задачи, при наложении на него ограничений и критериев эффективности, способен стать ядром алгоритмов решения оптимизационной задачи ПП методом переборов.
На базе проведенных посредством МПДК расчетов и их анализа преодолена познавательная сложность формирования траекторий движения квантомобиля на этапах ПП и энергозатрат на ПП.
Осмысление высоких энергозатрат на воздушное движение квантомобиля приводит к необходимости разрешения, по крайней мере, двух коллизий:
1) противоречий между переменной аэродинамикой экипажа и его конструктивной простотой;
2) обоснованное использование более высокого уровня норм энерговооруженности технических объектов при успешном повсеместном освоении извлечения энергии из ФВ.
Перечисленные результаты исследования обладают научной новизной и оригинальностью.
Развитие представленного метода будет полезным для моделирования движения квантомобилей при преодолении водных и иных преград, посадки и высадки на борт судов, доставки породы в карьерах и другое.