Return to article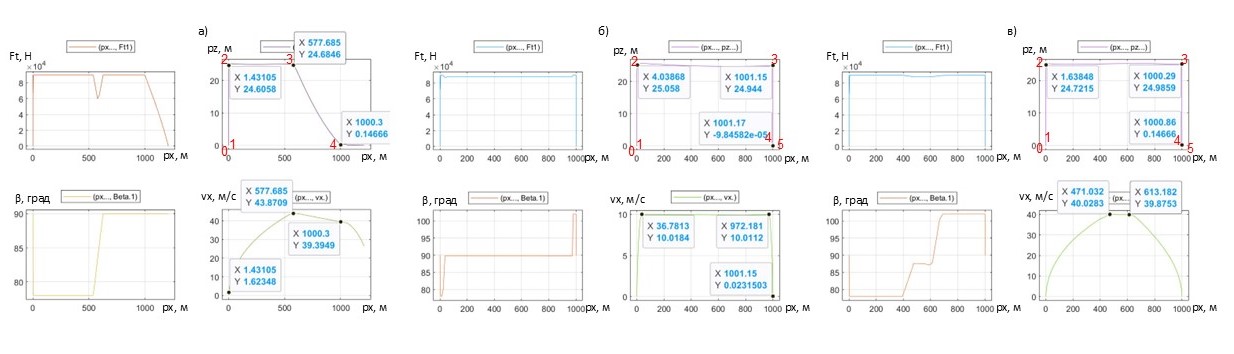
МОДЕЛИРОВАНИЕ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ КВАНТОМОБИЛЕМ
Рисунок 9 - Графики изменения FT(s), β(s), pz(s) и vx(s) ПЦ ПОТ 1-Box с высотой взлета 25 м и посадкой на 1000 м: а) c переменной vx (№пп 17|¯\_ ); б) с vx = 10 м/с (№пп 19 |¯|); в) с vx = 40 м/с (№пп 22 |¯|).