An Overview and Analysis of the Current State of the Market for Industrial Robot Manipulators
An Overview and Analysis of the Current State of the Market for Industrial Robot Manipulators
Abstract
The types into which robotic manipulators are divided are described, as well as the situations in which these or those types are used. Their advantages and disadvantages are revealed. In the course of the work, the market of industrial robots-manipulators has been analysed. The data about the number of industrial robots installed all over the world, the installations of industrial robots by regions of the world have been presented. The leaders among the companies engaged in the production and installation of industrial robots-manipulators have been identified. The position of Russia in the market of industrial robots has been described. Sales of industrial robots in Russia are increasing every year. In terms of the number of robots sold per year, Russia is 27th in the world. The main industry that buys these devices remains the automobile industry. Promising areas in the field of industrial robots are identified.
1. Введение
Промышленное устройство, которым человек может управлять в ручном режиме называется роботом манипулятором. Такое устройство может не только существовать как отдельная единица, но и входить в сложный роботизированный комплекс. Манипулятор состоит из узлов, каждый из них отвечает за конкретные задачи, одни позволяют совершать вращательное движение, другие же поступательное .
Современные технологии в настоящее время заняли очень высокие позиции, производства стали чаще устанавливать роботов, тем самым минимизируя человеческий ручной труд. В самых сложных производственных процессах роботы могут исполнять управляющие и двигательные функции. Все роботы-манипуляторы могут с успехом заместить собой несколько десятков профессионалов. На данный момент времени данный вопрос актуален, так как применение роботов-манипуляторов позволяет автоматизировать практически любой процесс промышленности.
Целью работы является рассмотрение всевозможных видов роботов-манипуляторов и анализ современного рынка.
Каждый год перед промышленностью остро стоит вопрос о сокращении экономических затрат. Благодаря применению роботов-манипуляторов на производстве можно сократить количество ошибок во время производственного процесса, сократить бракованные изделия, а также уменьшить потери сырья и снизить уровень травмоопасности. С помощью робототехники предприятие можно оптимизировать под разные технологии, обеспечить должный уровень труда и безопасности , .
2. Виды роботов-манипуляторов и их характеристика
Так как общей классификации роботов-манипуляторов нет, условно их можно разделить на несколько видов, которые объединяются по технологическому назначению, особенностям конструкции и другим параметрам.
По типу монтажа роботизированного оборудования (рис. 1) :
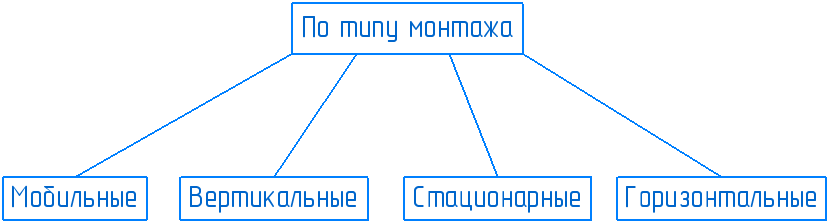
Рисунок 1 - Классификация роботов-манипуляторов по типу монтажа
Самыми популярными роботами-манипуляторами являются стационарные. Различаются по типу закрепления (напольный, потолочный, настенный), среди преимуществ – обширный радиус применения и увеличенная грузоподъемность.
Горизонтальные могут быть иметь протяженность до нескольких десяток метром и используются в местах эксплуатации нескольких объектов.
Вертикальные – используются там, где мало места.
По типу применения (рис. 2) :
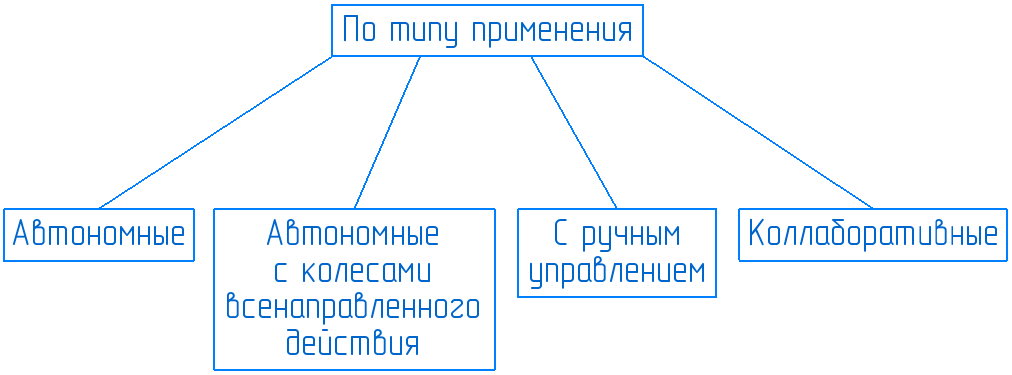
Рисунок 2 - Классификация роботов-манипуляторов по типу применения
Если оснастить робота колесами всенаправляющего движения, то такое устройство может передвигаться в любые труднодоступные места для человека без его помощи.
Роботы-манипуляторы с ручным управлением обеспечивают высокую точность при изготовлении деталей.
Коллаборативные манипуляторы или коботы. Здесь отмечаются самые жесткие условия к конструкционной безопасности и программному обеспечению, такие меры должны минимизировать травмированные работников .
По типу выполняемых функций (рис. 3) :
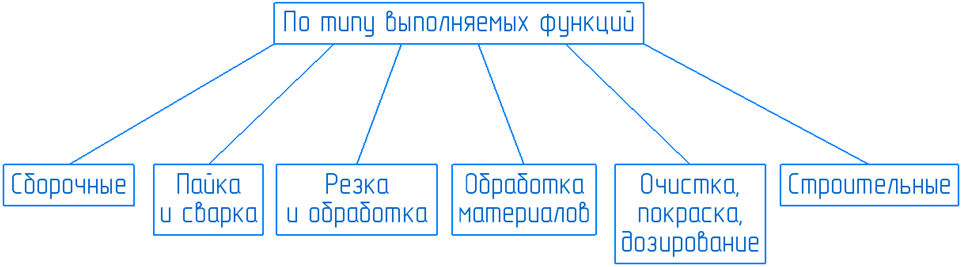
Рисунок 3 - Классификация роботов-манипуляторов по типу выполняемых функций
Пайка и сварка. Благодаря роботам можно добиться высокого уровня сварных швов и стабильности дуг, увеличивается скорость работы и можно применить очень низкий ток, то, чего нельзя при ручной аппаратной сварке.
Обработка материалов. Манипулятором можно добиться совершенно гладких поверхностей при условии повышения прочности стенок металла и его укрепления свыше чем на 30%, так как применяется холодная ковка.
Очистка, покраска, дозирование. Устройство можно использовать для очистки поверхностей водой под большим напором, пескоструйной обработке, либо покраске уже готового товара .
Резка и обработка. Такая процедура очень опасна для человека, для робота она не принесет никакого вреда, также роботы очень точно выполняют резку, при этом сокращается время обработки и минимизируется потеря материала.
Строительные. В строительной сфере роботы-манипуляторы позволяют увеличивать скорость строительства до максимальной с сохранением предельной точности. Устройство работает круглосуточно, не подвержено внешним погодным факторам и техническим особенностям процесса .
По типу привода (рис. 4) :
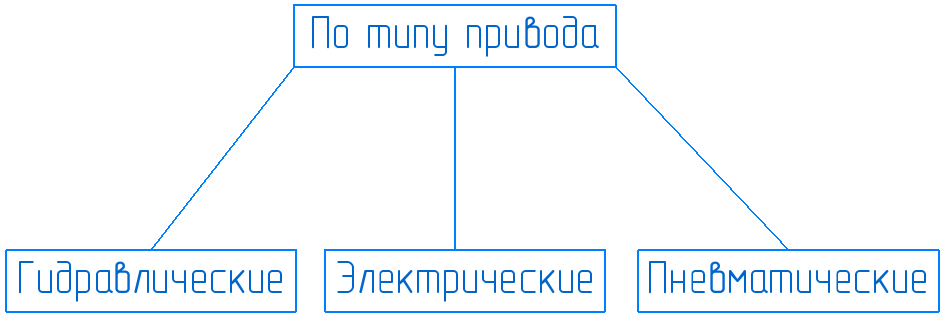
Рисунок 4 - Классификация роботов-манипуляторов по типу привода
Электрические. Приводятся в движение электрическим током, характеризуется хорошей производительностью и точностью действий.
Пневматические. Рабочий орган движется за счет энергии сжатого воздуха, который закачивается компрессором в пневмолинию.
По полезной нагрузке (рис. 5) :
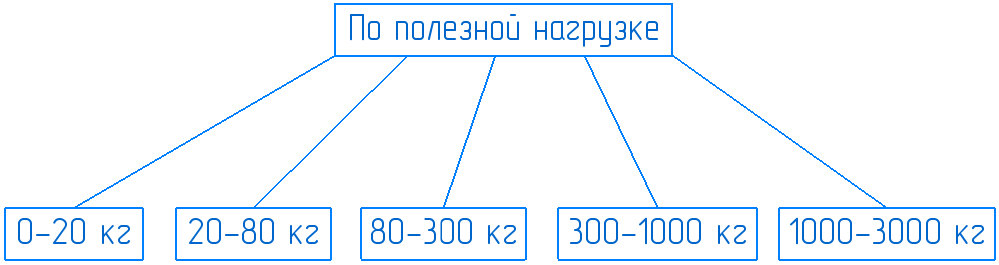
Рисунок 5 - Классификация роботов-манипуляторов по полезной нагрузке
20–80 кг. Универсальны в своем применении и обладают хорошей производительностью, их используют для неоднократных быстрых процессов.
80–300 кг. Применимы для тяжелых условий производств, мало подвержены износу, надежды и просты в своем использовании.
300–1000 кг. Используются для трудных условий, например, ими поворачивают кузова автомобилей или применяют в цехах для литья.
1000–3000 кг. Легко справляются с очень тяжелыми грузами, с точностью передвигают очень крупногабаритные грузы, поэтому применимы на погрузке и разгрузке .
3. Анализ рынка
По оценке Research and Markets промышленные роботы на мировом рынке (в эти цифры не закладывается стоимость компонентов, программного обеспечения и системный инжиниринг) в 2018 дошли до значения в 16,9 млрд долл. Предполагается, что средний темп роста рынка в последние 5 лет составит 12%, а в объёмных показателях 31,7 млрд. долл. Вся продукция, которую предполагалось перевозить в 2018 году остановилась на цифре четыреста двадцать тысяч роботов.
Данный показатель будет возрастать каждый год на 13% и установится на цифре 774 тысячи роботизированных устройств через два года. Общая цифра мирового рынка роботизированных устройств в 2018 году приближенно значится как 46 млрд.долл. Известно, что спустя 2 года эта цифра будет уже почти 70 с ежегодной прибавкой 7,9%.
Но, стоит отметить, что в 2019 Research and Markets пересмотрели параметры оценивания и последующие выводы, получив при этом число в 2018 году около 48,7 млрд.долл. индустриальных роботов, а спустя 6 лет объемный рост должен дойти до 75,7 млрд.долл., при примерном росте в год 10% по новому прогнозированию. По полученным данным выявляется тенденция уменьшения высококвалифицированных работников на производствах, что в перспективе ведет к автоматизированному производству с использованием коллаборативных роботов.
В конце 2020 года, всемирная ассоциация робототехники (International Federation of Robotics, IFR), оценила, что суммарное количество промышленных роботов, которых установили 4 года назад, на производствах составляет 422 271 штук, а весь рынок достиг почти 17 млрд.долл. (не учитывая составляющие и системные разработки). После 2018 года уменьшение продаж роботов для промышленности составило 12%, однако, общая цифра роботов, использующихся для эксплуатации, составляет почти 3 млн. единиц. , .
Данные о количестве устанавливаемых мировых промышленных роботов можно увидеть на (рис.6) .
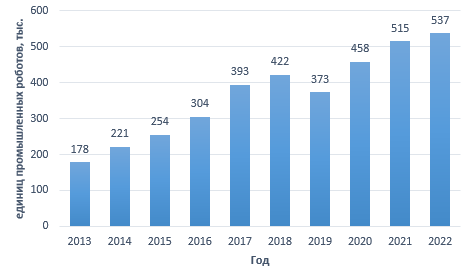
Рисунок 6 - Количество устанавливаемых промышленных роботов в мире за 2013-2022 гг
Статистические данные устанавливаемых промышленных роботов по регионам мира представлена на (рис.7) .
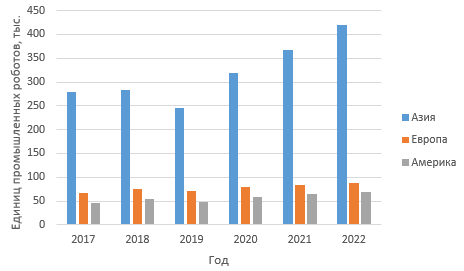
Рисунок 7 - Статистические данные устанавливаемых промышленных роботов в данное время по регионам мира за 2017-2022 гг
- Fanuc – 400 тыс. роботов;
- Yaskawa – 360 тыс. роботов;
- KUKA – 350 тыс. роботов;
- ABB – 300 тыс. роботов;
- Kawasaki – 160 тыс. роботов.
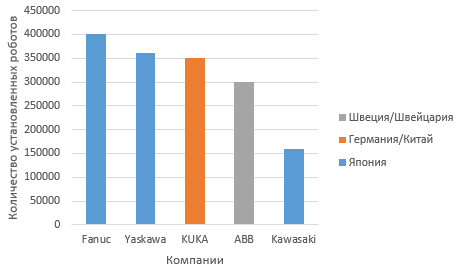
Рисунок 8 - Лидирующие компании по устанавливаемым промышленным роботам на всем промежутке времени
Однако в процентном соотношении было выявлено, что всего 5 роботов будет использоваться на десять тысяч работников промышленности, что в двадцать раз уменьшает среднее значение по миру, и только пять процентов роботов будут роботами отечественного производства , . Продаваемые промышленные роботы на территории нашей страны (рис.9) составляют значение меньше, чем в других более или менее развитых странах .
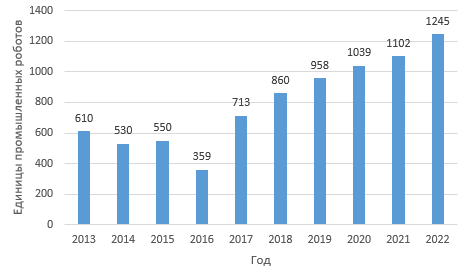
Рисунок 9 - Изменение количества продаваемых роботов на территории нашей страны
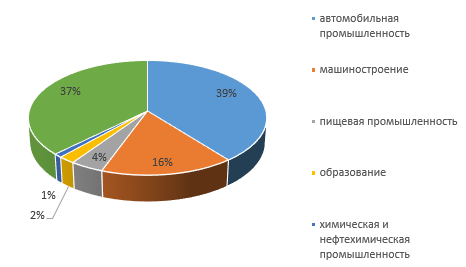
Рисунок 10 - Продажи промышленных роботов в России по отраслям в 2018 г
Россия занимает лишь 27 место по количеству продаваемых роботов. Весь рынок промышленных роботов нашей страны составляет около трех млрд.руб., рынок же роботизированных систем занимает около девяти млрд.руб. (сюда входят все этапы разработки, оснащения, написания программ и налаживания на производстве) .
Российская промышленность встречается со сложностями на начальном этапе проектирования и дальнейшего создания роботов, поскольку в государстве нет базовых необходимых деталей (сервомоторы, редукторы, системы линейного перемещения, контроллеры и др., которые привозятся из других стран), нет необходимой базы для включения робота в производственный процесс (быстро настраиваемое ПО, шаблоны, машинное зрение и т.д.), нет четких планов на ближайшее будущее, а также на данный момент экономически затратно внедрять проекты с роботами, поскольку ручной труд стоит дешевле, поэтому на выходе получаются долгие сроки окупаемости.
4. Заключение
Подводя итоги, перспективами развития в направлении промышленных роботов можно выделить такие пункты: введение машинного зрения, искусственного интеллекта, развитие коллаборативных роботов, способных к общему труду с человеком, совершенствование потенциала использования, развертывания и обслуживания. Роботы становятся многогранными, приспособленными и безошибочными. Для их создания применяют открытый программный код, цифровые технологии управления.
Сфера применения промышленных роботов с каждым годом увеличивается: не так давно промышленные роботы были нужны только в области автомобилестроения, сейчас же произошел резкий скачок потребности в таких роботах в области пищевой, фармацевтической, электротехнической/электронной и других направлениях промышленности, связанных с обработкой, что говорит о том, что применение и создание роботов становится популярным с каждым днем.