OPTIMIZATION OF QUASILINEAR COMPLICATED SYSTEMS: CASE OF THREE DETERMINED PRIORITIES

Волосатова Т.А.1, Данекянц А.Г.2
1ORCID: 0000-0001-6416-0212, Кандидат физ.-мат. наук, Донской государственный технический университет (Ростов-на-Дону), 2ORCID: 0000-0002-0409-0694, Кандидат физ.-мат. наук, Донской государственный технический университет (Ростов-на-Дону)
ОПТИМИЗАЦИЯ КВАЗИЛИНЕЙНЫХ СЛОЖНЫХ СИСТЕМ: СЛУЧАЙ ТРЕХ ДЕТЕРМИНИРОВАННЫХ ПРИОРИТЕТОВ
Аннотация
Данная статья является продолжением исследований математической модели экономической системы, предложенной в работах [1]-[2]. В пространстве Rn заданы три неотрицательные ненулевые непрерывные функции ![]() . Существует экономическая система (например, бюджетная организация). Внутренние требования системы выражаются функцией F3. Экономическая система не является независимой и на нее действуют внешние "оптимизаторы" (например, различные министерства). В данной работе рассмотрена задача с двумя внешними "оптимизаторами". Требования оптимизаторов к системе описываются функциями F1 и F2. Внутренние цели системы и цели "оптимизаторов" в большинстве случаев не совпадают, поэтому функции
. Существует экономическая система (например, бюджетная организация). Внутренние требования системы выражаются функцией F3. Экономическая система не является независимой и на нее действуют внешние "оптимизаторы" (например, различные министерства). В данной работе рассмотрена задача с двумя внешними "оптимизаторами". Требования оптимизаторов к системе описываются функциями F1 и F2. Внутренние цели системы и цели "оптимизаторов" в большинстве случаев не совпадают, поэтому функции ![]() естественно рассматривать как разнонаправленные целевые функции. Существует некий арбитр (регулятор), который может влиять как на развитие самой системы, так и на "оптимизаторов". Арбитр заинтересован в плодотворном взаимодействии всех структур. В соответствии с [1–2] мы рассматриваем целевую функцию арбитра вида:, где
естественно рассматривать как разнонаправленные целевые функции. Существует некий арбитр (регулятор), который может влиять как на развитие самой системы, так и на "оптимизаторов". Арбитр заинтересован в плодотворном взаимодействии всех структур. В соответствии с [1–2] мы рассматриваем целевую функцию арбитра вида:, где ![]() . Детерминированные показатели a1,a2,a3 называются приоритетами. В рамках предложенной квазилинейной модели получены необходимые условия существования стационарных точек целевой функции и найдена точка локального максимума функции F.
. Детерминированные показатели a1,a2,a3 называются приоритетами. В рамках предложенной квазилинейной модели получены необходимые условия существования стационарных точек целевой функции и найдена точка локального максимума функции F.
Ключевые слова: локальный максимум целевой функции арбитра, функции квазилинейного вида, детерминированные приоритеты.
Volosatova T.A.1, Danekyants A.G.2
1ORCID: 0000-0001-6416-0212, PhD in Physics and Mathematics, Don State Technical University (Rostov-on-Don), 2ORCID: 0000-0002-0409-0694, PhD in Physics and Mathematics, Don State Technical University (Rostov-on-Don)
OPTIMIZATION OF QUASILINEAR COMPLICATED SYSTEMS: CASE OF THREE DETERMINED PRIORITIES
Abstract
This paper is prolongation of researches of mathematical model of the economic system offered in works [1] - [2]. In space Rn three nonnegative nonzero continuous functions ![]() are set. There is an economic system (for example, the state enterprise). Function F3 describes interior requirements of the system. The economic system is dependent on external “optimizers” (for example, the various ministries). The problem with two exterior "optimizers" is considered in this work. “Optimizer’s” system requirements are described by functions F1 and F2. Interior purposes of the system and “optimizers” does not match in most cases, therefore
are set. There is an economic system (for example, the state enterprise). Function F3 describes interior requirements of the system. The economic system is dependent on external “optimizers” (for example, the various ministries). The problem with two exterior "optimizers" is considered in this work. “Optimizer’s” system requirements are described by functions F1 and F2. Interior purposes of the system and “optimizers” does not match in most cases, therefore ![]() is considered as multidirectional target functions. There is a certain arbiter (governor) who can influence both the system development, and “optimizers”. The arbiter is interested in productive interaction of all structures. According to [1-2] we consider target arbiter function type:
is considered as multidirectional target functions. There is a certain arbiter (governor) who can influence both the system development, and “optimizers”. The arbiter is interested in productive interaction of all structures. According to [1-2] we consider target arbiter function type: ![]() , where
, where ![]() and
and ![]() . The determined indicators a1,a2,a3 are called as priorities. Required stationary points conditions of target function and function F local maximum are determined within the limits of the offered quasilinear model.
. The determined indicators a1,a2,a3 are called as priorities. Required stationary points conditions of target function and function F local maximum are determined within the limits of the offered quasilinear model.
Keywords: local maxima of target function of the arbiter, function of the quasilinear aspect, the determined priorities.
В пространстве Rn рассмотрим неотрицательные ненулевые непрерывные функции ![]() , дважды непрерывно дифференцируемые на открытых множествах
, дважды непрерывно дифференцируемые на открытых множествах ![]() соответственно, где i=1,2,3. При этом
соответственно, где i=1,2,3. При этом ![]() , а через
, а через ![]() обозначаем в дальнейшем их дополнения. Функции
обозначаем в дальнейшем их дополнения. Функции ![]() , будем интерпретировать как разнонаправленные целевые функции. Целевая функция выражает внутренние требования системы, а функции F1 и F2 формулируют требования некоторых внешних “оптимизаторов” к этой системе. Построим новую целевую функцию арбитра
, будем интерпретировать как разнонаправленные целевые функции. Целевая функция выражает внутренние требования системы, а функции F1 и F2 формулируют требования некоторых внешних “оптимизаторов” к этой системе. Построим новую целевую функцию арбитра
![]() (1)
(1)
показатели которой удовлетворяют условиям: ![]() и
и ![]() . В дальнейшем, показатели a1,a2,a3 будем называть приоритетами. Умножение в формуле (1) предполагает, что арбитр, оказывая влияние на внутреннюю структуру системы и на внешних “оптимизаторов”, стремится обеспечить эффективную работу всей системы, то есть максимизировать целевую функцию F.
. В дальнейшем, показатели a1,a2,a3 будем называть приоритетами. Умножение в формуле (1) предполагает, что арбитр, оказывая влияние на внутреннюю структуру системы и на внешних “оптимизаторов”, стремится обеспечить эффективную работу всей системы, то есть максимизировать целевую функцию F.
Исходя из вышеизложенного, считаем, что ![]() , то есть принимаем в рассмотрении только ситуации, когда существуют точки локальных и глобальных максимумов функции F. Если , то
, то есть принимаем в рассмотрении только ситуации, когда существуют точки локальных и глобальных максимумов функции F. Если , то ![]() , то есть такие точки являются точками глобального минимума функций F. Будем предполагать, что Fi являются функциями «квазилинейного» вида:
, то есть такие точки являются точками глобального минимума функций F. Будем предполагать, что Fi являются функциями «квазилинейного» вида:
 (2)
(2)
Найдем частные производные функций ![]() . При этом будем использовать обозначения
. При этом будем использовать обозначения
![]() (3)
(3)

Из того, что ![]() , и из условий (2) вытекает, что
, и из условий (2) вытекает, что ![]() . Таким образом, существование точки
. Таким образом, существование точки ![]() , в которой
, в которой ![]() при всех
при всех ![]() , равносильно выполнению следующего условия:
, равносильно выполнению следующего условия:
 (4)
(4)
В стационарной точке ![]() функции
функции ![]() и
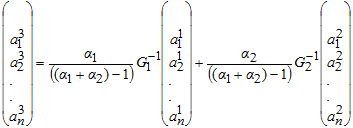
и ![]() . С учетом того, что принимают фиксированные значения, из формулы (4) вытекает, что существование стационарной точки
. С учетом того, что принимают фиксированные значения, из формулы (4) вытекает, что существование стационарной точки ![]() равносильно линейной зависимости системы векторов
равносильно линейной зависимости системы векторов ![]() .
.
Введем обозначения ![]() , тогда
, тогда ![]() ,
, ![]() .
.
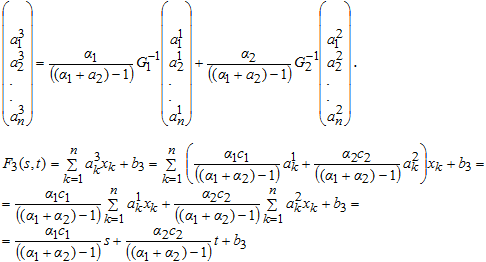 Тогда
Тогда
 (5)
Исследуем функцию F(s,t) на экстремум.
(5)
Исследуем функцию F(s,t) на экстремум.
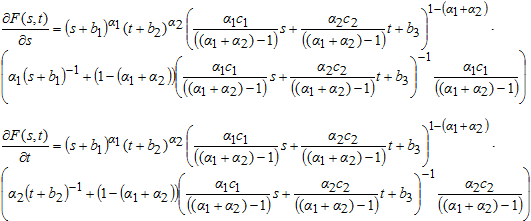
Таким образом, в стационарной точке ![]() , с учетом условий (2), необходимое условие экстремума функции F(s,t) будет иметь вид:
, с учетом условий (2), необходимое условие экстремума функции F(s,t) будет иметь вид:
 (6)
(6)
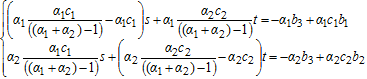
Определим, имеет ли система (6) решение. Вычислим главный определитель системы.

Так как приоритеты ![]() , и константы
, и константы ![]() , то
, то ![]() , значит система (6) имеет единственное решение. Решаем систему (6) и находим критическую точку M(s,t) функции F(s,t).
, значит система (6) имеет единственное решение. Решаем систему (6) и находим критическую точку M(s,t) функции F(s,t).
![]() (7)
(7)
Определим, является ли стационарная точка M(s,t) точкой экстремума. Найдем частные производные второго порядка:
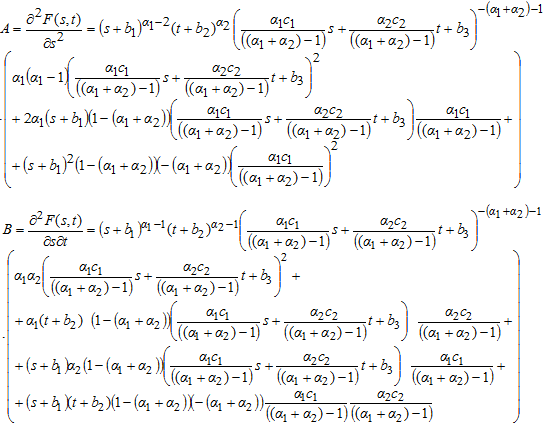
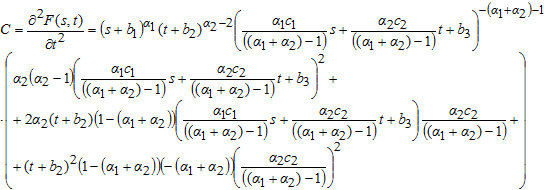
![]()
функция достигает своего локального максимума, если в этой точке выполняются следующие условия: ![]() .
.
Проверим, что ![]() .
.
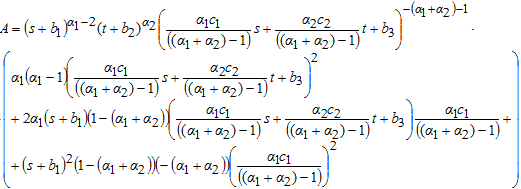
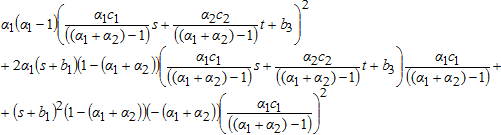
В данном выражении первое слагаемое отрицательное, т.к. ![]() , второе слагаемое отрицательное, так как только множитель
, второе слагаемое отрицательное, так как только множитель ![]() , и третье слагаемое отрицательное, так как только множитель
, и третье слагаемое отрицательное, так как только множитель ![]() . Значит, A < 0, в любой точке.
. Значит, A < 0, в любой точке.
Определим знак выражения ![]() . В стационарной точке М выполняются равенства (6), из которых получаем:
. В стационарной точке М выполняются равенства (6), из которых получаем:

Первый и второй множители в произведении строго положительны, исследуем знак третьего множителя. Так как ![]() , получаем
, получаем ![]() , откуда следует, что
, откуда следует, что ![]() <0.
<0.
Таким образом, мы доказали, что точка − точка локального максимума функции F(s,t).
Итак, нами доказана следующаяТЕОРЕМА. Для того, чтобы функция ![]() , заданная равенством (1)-(3), имела стационарные точки, необходимо, чтобы система векторов
, заданная равенством (1)-(3), имела стационарные точки, необходимо, чтобы система векторов ![]() была линейно зависима и выполнялось равенство
была линейно зависима и выполнялось равенство
![]()
Обратно, пусть эти условия выполнены. Введем обозначения ![]() . Тогда целевая функция F примет вид (5). Исследуемая функция F(s,t) имеет локальный максимум в точке
. Тогда целевая функция F примет вид (5). Исследуемая функция F(s,t) имеет локальный максимум в точке ![]() .
.
Доказанная теорема, показывает, что рассматриваемая в работе экономическая система может функционировать с оптимальной отдачей, если есть арбитр, который жестко расставляет приоритеты, основываясь на актуальных данных. Но надо понимать, что ситуации, возникающие в системе, могут трактоваться экспертами не однозначно, данные предоставленные разными сторонами арбитру могут существенно различаться и сам арбитр может иметь личные предпочтения. Поэтому в дальнейших исследованиях, логично предположить, что приоритеты − это случайные величины. Также следует рассмотреть модель с большим числом приоритетов.
Данная работа выполнена при поддержке РФФИ (грант № 16-01-00184а).
Литература
- Вагин В.С., Павлов И.В. Оптимизация квазилинейных моделей сложных систем с учетом вероятностного характера приоритетов. // Сборник тезисов Международной конференции «XXVI Крымская осенняя математическая школа-симпозиум по спектральным и эволюционным задачам». – Симферополь, 2015. – С. 109.
- Вагин В.С., Павлов И.В. Моделирование и оптимизация квазилинейных сложных систем с учетом вероятностного характера приоритетов. // Научно-технический журнал «Вестник РГУПС» –Ростов-на-Дону, 2016. №1(61). – С. 135-139.
- Волосатова Т.А., Данекянц А.Г. Оптимизация квазилинейных сложных систем с тремя приоритетами. // Сборник тезисов Международной научной конференции «Современные методы и проблемы теории операторов и гармонического анализа и их приложения VI» – Ростов-на-Дону, 2016. – С. 132.
References
- Vagin V.S., Pavlov I.V. Optimizacija kvazilinejnyh modelej slozhnyh sistem s uchetom verojatnostnogo haraktera prioritetov [Optimization of quasi-linear models of complicated systems with using random nature of priorities]. // Sbornik tezisov Mezhdunarodnoj konferencii «XXVI Krymskaja osennjaja matematicheskaja shkola-simpozium po spektral'nym i jevoljucionnym zadacham». –2015. – S. 109. [in Russian]
- Vagin V.S., Pavlov I.V. Modelirovanie i optimizacija kvazilinejnyh slozhnyh sistem s uchetom verojatnostnogo haraktera prioritetov [Modeling and optimization of quasi-linear models of complete systems with using random nature of priorities]. // Nauchno-tehnicheskij zhurnal «Vestnik RGUPS» [Scientific and Technical Journal «Vestnik RGUPS»]. – Rostov-na-Donu, 2016. #1(61). – S. 135-139. [in Russian]
- Volosatova T.A., Danekjanc A.G. Optimizacija kvazilinejnyh slozhnyh sistem s tremja prioritetami [Optimization of quasi-linear complicated systems with three priorities]. // Sbornik tezisov Mezhdunarodnoj nauchnoj konferencii «Sovremennye metody i problemy teorii operatorov i garmonicheskogo analiza i ih prilozhenija VI» [The collection of theses of the Sixth International Scientific Conference "Modern Methods, Problems and Applications of Operator Theory and Harmonic Analysis VI"] – Rostov-na-Donu, 2016. – S. 132. [in Russian]