Визуализация деформаций, сдвигов и поворотов в двумерном пространстве как мост между алгеброй и геометрической интуицией инженера
Визуализация деформаций, сдвигов и поворотов в двумерном пространстве как мост между алгеброй и геометрической интуицией инженера

Аннотация
В статье представлено исследование по разработке и внедрению программного продукта для геометрической интерпретации линейных преобразований в двумерном пространстве как инструмента по формированию пространственной интуиции студентов технических специальностей при изучении курса линейной алгебры. Разработанное приложение демонстрирует деформацию двумерного пространства при действии на него произвольного линейного оператора. В качестве объектов деформации выбраны единичный круг, сетка и собственные векторы. Все три модели реализованы на языке Python в среде Jupyter Notebook и параметрически связаны через единую матрицу линейного преобразования. Для демонстрации универсальности и наглядности разработанного алгоритма, он применен к линейным операторам, изучаемым в курсе — растяжению, повороту, сдвигу и ортогональной проекции. Новизна и методическая значимость состоят в имеющейся возможности показать, что происходит с разным множеством точек при действии на них одним и тем же оператором, продемонстрировать работу любого линейного оператора, научить видеть связь матрицы оператора с его геометрическим образом, описывать оператор аналитически по чертежу. Разработанный программный продукт является методическим инструментом, позволяющим наглядно и быстро подкрепить образами теоретическое изложение материала по теме «Линейные операторы», апробированным при чтении лекций для студентов первого курса института информационных технологий РТУ МИРЭА.
1. Введение
Линейная алгебра занимает центральное место в математической подготовке студентов технических специальностей, поскольку её аппарат лежит в основе компьютерной графики, механики деформируемого тела, робототехники и анализа данных. Вместе с тем — это один из тех курсов, где особенно заметен разрыв между умением студента считать и понимать объект, подлежащий расчету. Студент технической специальности к концу первого семестра, как правило, уверенно перемножает матрицы, находит определители и решает системы уравнений. Но стоит спросить, что именно делает матрица с пространством — растягивает, поворачивает, сжимает, отражает? — и уверенность заметно убывает. За строчками чисел не стоит никакого образа и мало понимания сути происходящего.
Это не частная педагогическая проблема и не особенность конкретного ВУЗа. Традиционное изложение линейной алгебры устроено так, что геометрический смысл объектов либо упоминается вскользь, либо иллюстрируется единственным статичным рисунком в учебнике, где нарисован параллелепипед или стрелочка, обозначающая вектор. Между тем понятие матрицы преобразования становится по-настоящему рабочим инструментом только тогда, когда студент видит, как она действует: как единичный круг вытягивается в эллипс, как координатная сетка перекашивается в параллелограммную, как одни направления остаются неподвижными, а другие поворачиваются. Именно геометрической интуиции чаще всего не хватает нашему вчерашнему школьнику при переходе к смежным дисциплинам, таким как механика, компьютерная графика, анализ данных и др.
Отдельные геометрические интерпретации линейных преобразований, разумеется, присутствуют в учебниках по линейной алгебре и аналитической геометрии , , , . Однако во всех них визуализация статична, поскольку читатель видит одну картинку для одного фиксированного преобразования. Возможности динамически менять матрицу и наблюдать, как одновременно меняется форма эллипса, как происходит деформация сетки и что происходит с инвариантными направлениями, учебник по определению дать не может.
Инструменты для визуализации математических объектов давно существуют и широко применяются в образовательной практике. Наиболее распространённым из них является динамическая математическая среда GeoGebra, которая позволяет строить геометрические объекты и наблюдать их преобразования в интерактивном режиме и которую авторы уже использовали ранее в своей практике , , . Для визуализации линейных преобразований в среде GeoGebra можно задать вектор и показать его образ, показать деформацию конкретной фигуры, применив матрицу линейного оператора преобразования, но каждая такая демонстрация создаётся отдельно и не связана с другими, а также требует от преподавателя заранее подготовленного сценария. Также готовые интерактивные примеры для линейной алгебры представлены и в сложных математических пакетах, но они ориентированы на отдельные понятия и не позволяют наблюдать несколько интерпретаций одного преобразования одновременно. Существуют отдельные учебные примеры и среди разработок на Python, но они, как правило, разрознены, а не соединены через единую матрицу и не апробированы как методический комплекс. Таким образом, мы пришли к тому, что есть общее ограничение существующих решений — это отсутствие единого параметрического инструмента, в котором несколько геометрических интерпретаций одного линейного преобразования были бы связаны через один управляющий параметр и обновлялись синхронно.
Руководствуясь пробелами, о которых сказано выше, востребованностью и актуальностью, мы решили реализовать именно такой динамический инструмент, причём доступный и студенту, и преподавателю без какой-либо специальной подготовки на языке Python с библиотекой matplotlib в среде Jupyter Notebook.
К разработке нашего программного продукта нас подтолкнули два глобальных исследования — теория двойного кодирования А. Пайвио , в которой говорится о том, что совместное предъявление математического объекта в символьной и графической формах усиливает его запоминание и понимание, и теория когнитивной нагрузки Дж. Свеллера , согласно которой динамическая визуализация перекладывает часть когнитивной работы на зрительную систему, высвобождая тем самым ресурсы для осмысления изучаемого материала. Кроме того, нами двигало желание активизировать познавательные процессы студентов, помочь им в восприятии сложных математических образов и стимулировать аналитическое мышление, повысив тем самым их мотивацию в осмысленном использовании цифровых инструментов для решения исследовательских задач математики . Актуальность визуализации математических объектов в обучении линейной алгебре также подтверждается рядом современных исследований. По данным мета-анализа , охватывающего 41 работу с суммарной выборкой более 10 000 участников, средний размер эффекта визуальных вмешательств в обучении математике составляет g=0,50. Систематический обзор , охвативший 49 публикаций за 2016–2024 годы, фиксирует, что развитие геометрической интуиции студентов остаётся одним из центральных и до сих пор открытых вопросов в методике преподавания линейной алгебры — особенно применительно к понятиям собственных значений, собственных векторов и линейных преобразований. В работе показано, что без геометрического образа студент воспринимает объекты линейной алгебры как формальные символы, не наделяя их смыслом, и значит именно визуальный способ представления собственных векторов является ключевым для их понимания студентами с разным уровнем математической подготовки. В работе авторы на материале задач для инженерных специальностей демонстрируют, что активный исследовательский подход, при котором студент сам «открывает» геометрический смысл матричного уравнения, существенно превосходит по эффективности традиционное лекционное изложение. Необходимость преодоления разрыва между формальным алгебраическим аппаратом и его геометрической интерпретацией отмечается также в современных российских исследованиях , где показана высокая корреляция между использованием интерактивных визуальных технологий и успеваемостью студентов в цифровой образовательной среде. Аналогичные выводы о том, что компьютерное моделирование позволяет перевести абстрактные понятия матричных преобразований в разряд геометрически наглядных, представлены в работе . Таким образом, задача, которую мы ставим в нашей работе — предоставить студенту инструмент для такого исследования, а преподавателю инструмент для демонстрации и подкрепления теории, имеет прямое обоснование в современной методической литературе.
Цель настоящей работы — разработать систему из трёх взаимосвязанных геометрических моделей, визуализирующих действие матрицы линейного преобразования в двумерном пространстве V2, и реализовать её в виде единого интерактивного инструмента на языке Python в среде Jupyter Notebook, который впоследствии можно широко внедрить как дополнительный методический инструмент в лекционные курсы и семинарские занятия. Для достижения поставленных целей объектом исследования был выбран аппарат линейных преобразований двумерного пространства; предметом — геометрическая интерпретация матрицы преобразования через деформацию единичного круга, координатной сетки и инвариантных направлений.
Заметим, что каждая из трёх геометрических моделей по отдельности встречается в учебниках и статьях, но в нашей работе они системно объединены в единый интерактивный инструмент с одним управляющим параметром — матрицей A, позволяющий наблюдать геометрические эффекты одного преобразования одновременно в трёх интерпретациях и сопоставлять их между собой. Изменили матрицу — увидели все три интерпретации сразу. Раздел, где одни и те же три модели применяются к четырём классическим типам преобразований (растяжение, поворот, сдвиг, вырождение) — это наш методический вклад, поскольку такого сравнительного представления в доступных русскоязычных учебных материалах по линейной алгебре, насколько нам известно, нет.
Предложенный инструмент был использован на лекционных занятиях по теме «Линейные операторы» студентов первого курса РТУ МИРЭА и показал себя с высокой степень эффективности, о чем подробно изложено в разделе «Апробация» данной статьи.
2. Математические основы исследования
Математическими основами нашего исследования являются понятия базиса и матрицы линейного преобразования. Разберем кратко каждое из них для понимания в дальнейшем происходящего.
2.1. Линейное преобразование и матрица перехода
Пусть задано двумерное пространство геометрических векторов V2 со стандартным базисом
для любых векторов
Вектор
Ключевую роль в геометрической интерпретации преобразования играет определитель матрицы преобразования, равный коэффициенту изменения площади при линейном преобразовании. Так, если исходная фигура имеет площадь S, то её образ имеет площадь ∣det 𝐴∣⋅𝑆. Знак определителя несёт дополнительную информацию о том, что происходит с ориентацией пространства после преобразования. Если определитель больше 1, то преобразование растягивает фигуру, площадь увеличивается; если лежит в границах от 0 до 1, то площадь уменьшается, пространство сжимается; если меньше нуля, то дополнительно к изменению масштаба происходит отражение; ну и наконец, если определитель равен нулю, то преобразование вырождено, что означает, что двумерное пространство «схлопывается» в прямую или в точку — вырожденная матрица переводит всё множество векторов плоскости в одномерное подпространство — прямую, проходящую через начало координат. Если два различных вектора лежат не на этой прямой, то они проецируются в одну точку. Именно поэтому вырождение геометрически столь наглядно — плоскость буквально схлопывается.
2.2. Сингулярное разложение и деформация единичного круга
Центральным математическим инструментом первой из наших моделей является сингулярное разложение (SVD — Singular Value Decomposition). Любую матрицу 𝐴∈ℝ2×2 можно представить в виде произведения трёх матриц: A=UΣVT, где U и V — ортогональные матрицы (то есть матрицы поворота или отражения), а Σ — диагональная матрица вида
Числа σ1 и σ2 называются сингулярными числами матрицы A. Они всегда вещественны и неотрицательны. Такое представление матрицы показывает, что любое линейное преобразование можно представить в виде композиции трех последовательных линейных преобразований: поворота, за который отвечает применение к векторам пространства матрицы VT, не меняющего при этом форму фигуры, а значит сохраняющего расстояния и углы сохраняются; растяжения, за которое отвечает применение матрицы Σ — горизонтальное направление растягивается в σ1 раз, а вертикальное растягивается в σ2 раз и именно после такого преобразования круг превращается в эллипс с горизонтальной полуосью равной σ1, а вертикальной σ2; и, наконец, второго поворота, соответствующего ортогональной матрице U, которая «доворачивает» эллипс в финальное положение.
Из этого разложения следует интересный и очень важный факт, что образ единичного круга при любом невырожденном линейном преобразовании есть всегда эллипс.
Поскольку при этом преобразовании ∣det A∣=σ1⋅σ2, то площадь эллипса (πσ1σ2) относится к площади исходного круга (π⋅12=π) ровно как ∣det A∣.
2.3. Собственные значения, собственные векторы и инвариантные направления
Напомним, что ненулевой вектор называется собственным вектором матрицы A, если преобразование не меняет его направление, а лишь растягивает или сжимает его. Собственные значения линейного преобразования являются корнями характеристического уравнения матрицы A: λ2-tr(A)λ+det A=0, где tr(A) — след матрицы A. Дискриминант этого уравнения определяет характер собственных значений. Если он строго положителен, то существует два различных вещественных собственных значения, а значит, два инвариантных направления; если он равен нулю, то у нас только одно кратное вещественное собственное значение; и, наконец, если он строго меньше нуля, то вещественных собственных значений нет, а значит нет и инвариантных направлений.
Здесь будет уместно сказать о разнице между собственными векторами линейного преобразования и сингулярными. Сингулярные векторы (столбцы матрицы U и строки матрицы VT в SVD-разложении) показывают направления максимального растяжения и всегда существуют. Собственные же векторы показывают инвариантные направления и существуют не всегда. Инвариантное направление — это направление в пространстве, которое преобразование не поворачивает. Вектор, лежащий вдоль этого направления, после применения матрицы может стать длиннее или короче, может развернуться на 180°, но не отклонится в сторону. Для симметричной матрицы эти два понятия совпадают; для несимметричной — как правило, нет. Именно это различие подтолкнуло нас к необходимости сравнения двух моделей — эллипса и собственных векторов. Они отвечают на разные вопросы об одном и том же преобразовании и позволяют студентам «увидеть» разницу между этими двумя понятиями.
3. Основные результаты
Все три модели, которые мы используем далее, управляются одним параметром — матрицей A, что позволяет видеть не три независимые иллюстрации, как в принятом академическом изложении курса, а три разных ракурса одного и того же преобразования. Для определенности мы взяли далее матрицу
Поскольку определитель этой матрицы больше единицы, то, как было отмечено выше, наше преобразование растягивает площади, что и будет видно на всех трёх рисунках.
Рассмотрим каждую модель в отдельности.
3.1. Модель 1: единичный круг и его образ
Первая наша модель позволяет продемонстрировать, насколько сильно и в каком направлении преобразование растягивает пространство?
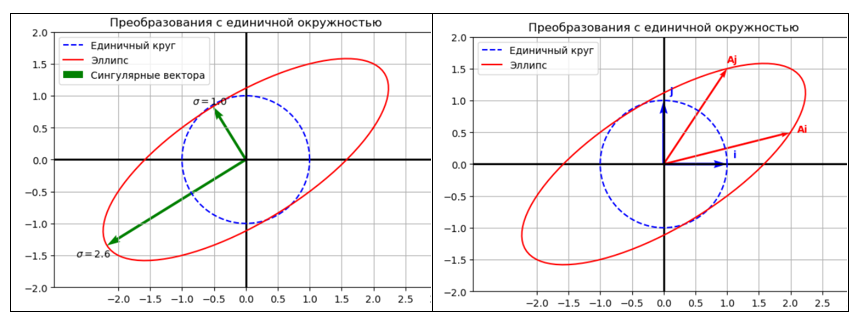
Возьмём единичный круг. Поскольку круг равномерно представляет все направления двумерного пространства, то его было решено выбрать в качестве тестового объекта. Его образ при невырожденном линейном преобразовании всегда является эллипсом, полуоси которого совпадают с сингулярными числами матрицы A и характеризуют степень растяжения пространства вдоль главных направлений.
На рисунке 1, приведенном ниже, единичный круг представлен синей пунктирной линией, его образ — эллипс — красной. Для нашей матрицы σ1≈2,55 и σ2≈0,98, что означает, что преобразование вытягивает пространство примерно в 2,55 раза вдоль главного направления и сжимает вдоль перпендикулярного. Также на рисунке 1 дополнительно показаны базисные векторы и их образы, которые задают «новый базис» деформированного пространства: исходный единичный квадрат, построенный на базисных векторах, переходит в параллелограмм, построенный на образах этих векторов, площадь которого равна модулю определителя матрицы A.
Преобразование эллипса
Вторая модель показывает, что линейное преобразование делает с самой геометрией пространства?
Стандартная координатная сетка — это семейство горизонтальных и вертикальных прямых, равномерно покрывающих плоскость. Применим матрицу A к каждой точке этой сетки. В результате получим непосредственное графическое подтверждение трех фундаментальных свойств линейных преобразований, что прямые линии преобразуются в прямые; при линейном преобразовании параллельность сохраняется; при линейном преобразовании начало координат остаётся на месте.
Что же меняется при линейном преобразовании? Меняются углы и расстояния, что наглядно показывает наша работа, обобщенная для любой матрицы. Действительно, исходная сетка состоит из взаимно перпендикулярных прямых. Однако после преобразования горизонтальные и вертикальные линии превращаются в два семейства параллельных прямых, пересекающихся под некоторым углом. Для нашей матрицы преобразованияэтот угол можно вычислить через скалярное произведение образов базисных векторов — он окажется острым, то есть сетка «скосится» (см. рисунок 2).
Нам кажется, что особенно наглядно на рисунке 2 виден геометрический смысл определителя. Единичный квадрат, ограниченный линиями x1=0, x1=1, x2=0, x2=1, переходит в параллелограмм, построенный на векторах
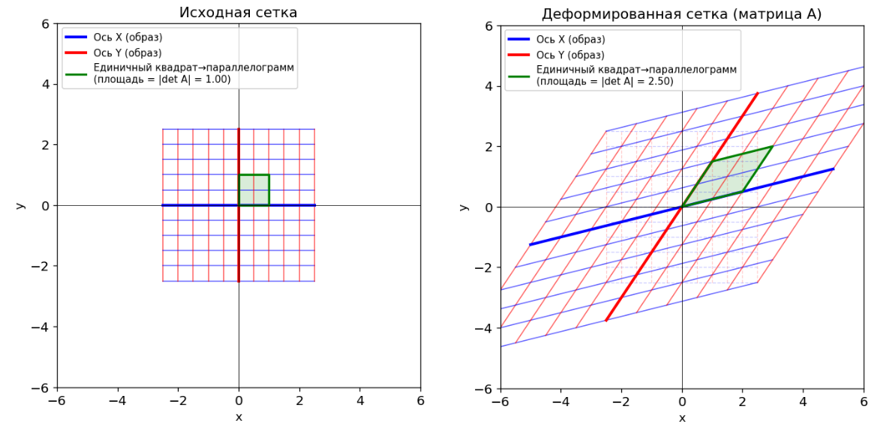
Деформация координатной сетки
синие линии – образы горизонтальных прямых, красные — образы вертикальных; зелёным выделен образ единичного квадрата –параллелограмм
Чтобы ответить на вопрос, есть ли в пространстве направления, которые преобразование вообще не поворачивает, мы задали третью модель.
Как было сказано выше, инвариантные направления существуют тогда и только тогда, когда дискриминант характеристического уравнения матрицы преобразования неотрицателен. И поскольку для нашей матрицы он равен 2,25, то это значит, что существуют два вещественных собственных значения, равных 2,5 и 1, каждому из которых соответствуют собственные векторы, которые можно наблюдать на рисунке 3 — они показаны как стрелки, исходящие из начала координат вместе со своими образами. Видно, что образ каждого собственного вектора лежит на той же прямой — направление не изменилось. Первый вектор с собственным значением 2,5 растянулся в 2,5 раза, а вектор с собственным значением равным 1 остался без изменений.
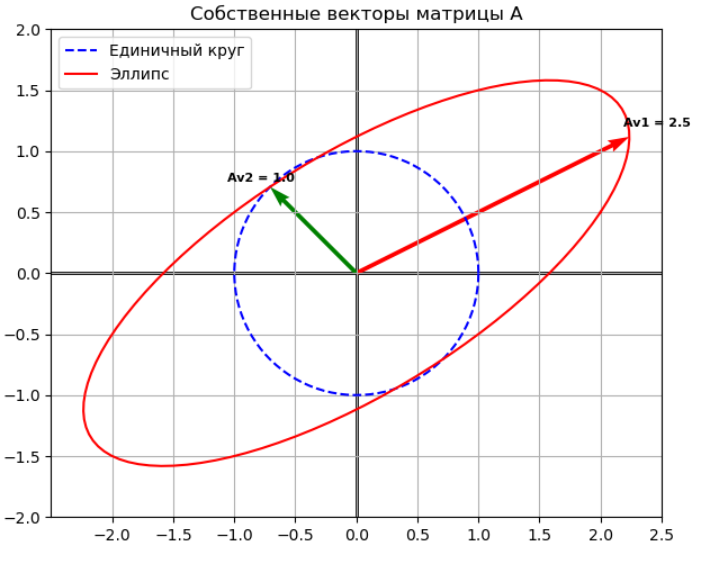
Интерпретация собственных векторов
эллипс — образ единичного круга (красная линия, для ориентировки); собственные векторы v1 (тёмно-красный) и v2 (зелёный)
Чтобы рассмотренные выше три геометрические модели не оставались иллюстрацией одного частного примера, рассмотрим растяжение, поворот, сдвиг и вырождение на каждой из них.
3.4.1. Растяжение
Рассмотрим диагональную матрицу
Это простейший случай. Здесь матрица растягивает пространство в 3 раза вдоль горизонтальной оси и в 1,5 раза вдоль вертикальной.
На первом рисунке 4, где круг переходит в эллипс, видно, что эллипс вытянут именно по горизонтали — его полуоси совпадают с диагональными элементами матрицы. Как уже отмечалось, это не случайность — для диагональной матрицы SVD-разложение тривиально: U=V=I, Σ=A, никаких поворотов нет, только растяжение вдоль координатных осей, что мы и наблюдаем.
На втором рисунке (деформация сетки) картина соответствующая — горизонтальные прямые растянулись в 3 раза, вертикальные растянуты в 1,5. Прямые углы сохранились, потому что матрица диагональная и образы базисных векторов по-прежнему перпендикулярны. Единичный квадрат превратился в прямоугольник площадью 4,5.
На третьем рисунке, где сделан акцент на собственные векторы, картина самая простая из всех четырёх случаев. Дискриминант характеристического уравнения матрицы A больше нуля и оба собственных значения вещественны и равны диагональным элементам. Собственные векторы совпадают с базисными векторами и направлены вдоль координатных осей. Инвариантные направления в данном случае видны сразу, без вычислений — это просто оси координат. Именно поэтому растяжение по осям — интуитивно и, подкрепленное графически, становится самым понятным из всех линейных преобразований.
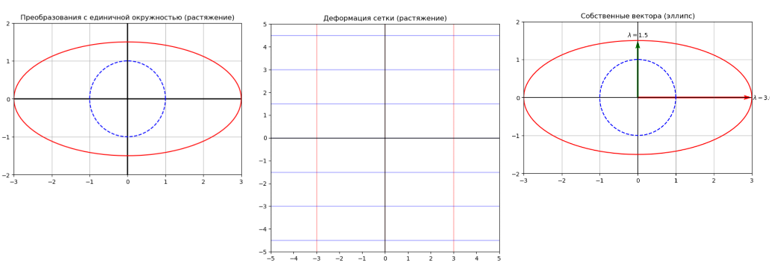
Деформация при растяжении
Рассмотрим отдельно в качестве линейного преобразования поворот вокруг начала координат на угол φ≠πk против часовой стрелки. Матрица этого преобразования будет выглядеть следующим образом
Это означает, что у матрицы поворота нет ни одного вещественного собственного значения, то есть чистый поворот не оставляет неподвижным ни одного направления на плоскости. Данный факт, который в алгебраическом изложении выглядит как сухое следствие из знака дискриминанта, в геометрической модели виден непосредственно — ни одна стрелка не остаётся на месте, всё пространство вращается как единое целое.
В работе в качестве примера взят угол в φ=45° (см. рисунок 5). Наше приложение позволяет динамически задавать любой нужный угол.
На первом рисунке 5 эллипс, как образ, совпадает со своим прообразом — исходным кругом. Это объясняется тем, что у матрицы поворота оба сингулярных числа равны единице, потому что поворот не меняет расстояний. Круг остаётся кругом. Площадь не меняется, поскольку определитель равен 1.
Второй рисунок с деформацией сетки показывает, что сетка повернулась на 45°, форма не изменилась, изменилась только ориентация — горизонтальные и вертикальные линии превратились в семейство параллельных диагональных прямых. При этом прямые углы между ними сохранились, поскольку ортогональная матрица преобразования сохраняет углы. Единичный квадрат превратился в квадрат той же площади, но повёрнутый.
Третий рисунок, иллюстрирующий поведение собственных векторов оказывается качественно иным по сравнению с растяжением. Дискриминант характеристического уравнения матрицы поворота оказывается здесь отрицательным, что означает, что вещественных собственных векторов нет, поэтому на рисунке вместо инвариантных стрелок видно, что каждый вектор при повороте отклоняется на заданный угол. Пространство вращается целиком, как жёсткое тело, не имея никакого «скелета». Именно этим поворот принципиально отличается от растяжения: у растяжения инвариантные направления есть, у поворота их нет и это легко видеть из рисунков.
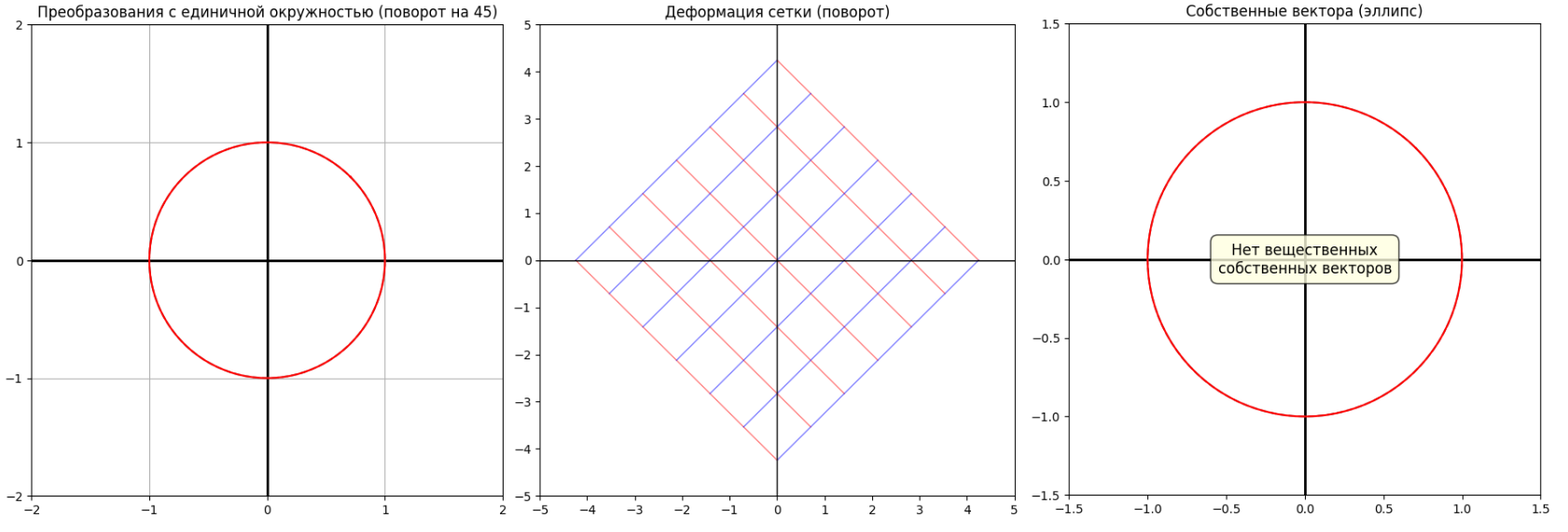
Деформация при повороте
Матрица сдвига — пожалуй, самый неочевидный из четырёх случаев:
Определитель матрицы равен единице и может возникнуть иллюзия, что сдвиг похож на поворот, однако рисунки показывают, что это совсем не так.
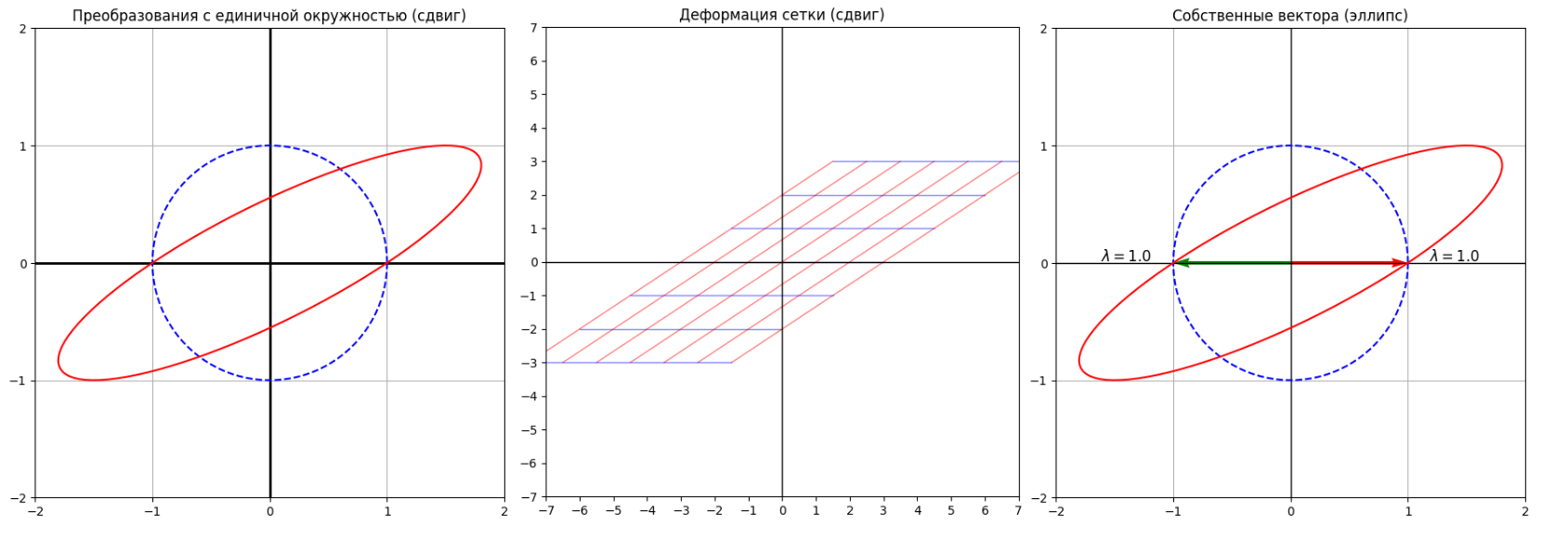
Деформация при сдвиге
На третьем рисунке, иллюстрирующем собственные векторы, картина снова особенная. Дискриминант характеристического уравнения равен нулю — это случай кратного собственного значения λ=1 – корень алгебраической кратности 2, геометрически это означает, что есть только одно инвариантное направление — горизонтальное вдоль оси OX, а второго независимого инвариантного направления нет. Матрица сдвига — классический пример невырожденного преобразования, которое тем не менее не имеет полного набора собственных векторов. На рисунке 6 видна единственная инвариантная ось, и видно, что все остальные векторы при сдвиге отклоняются от своих исходных направлений.
3.4.4. Ортогональная проекция на ось OX — вырождение
Рассмотрим матрицу оператора ортогональной проекции на ось OX:
Заметим, что это единственная из четырёх матриц, для которой преобразование необратимо — разные векторы переходят в один и тот же образ. Можно сказать, что происходит «схлопывание», что очень наглядно демонстрируют все три рисунка 7.
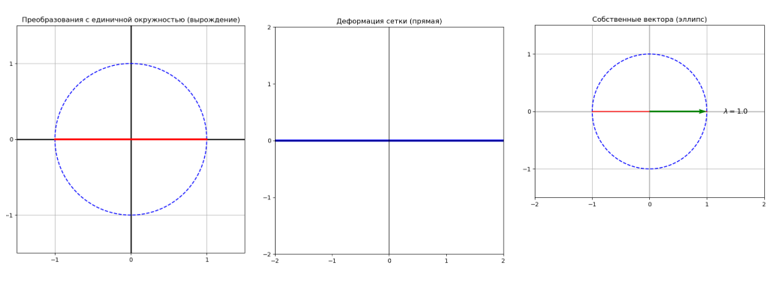
Деформация при ортогональном проектировании
При деформации сетки видим то же самое, но с другой стороны. Здесь все вертикальные линии проецируются в одну точку на оси OX. Все горизонтальные прямые переходят в одну-единственную горизонтальную ось. Двумерная плоскость становится одномерной прямой, а единичный квадрат превращается в отрезок на оси OX — параллелограмм с нулевой площадью.
В модели с собственными векторами оба базисных вектора оказываются собственными, отвечающими собственным значениям 1 и 0 соответственно. Собственный вектор с нулевым собственным значением — это вектор, который преобразование отправляет в начало координат. Геометрически это и есть направление «схлопывания» — всё, что смотрит вертикально, исчезает.
Одновременное рассмотрение трёх моделей позволяет увидеть различия в преобразованиях без обращения к алгебраическим вычислениям.
4. Апробация инструмента и интерпретация результатов
Апробация разработанного программного продукта проводилась на лекциях по теме «Линейные операторы» для студентов первого курса РТУ МИРЭА разных направлений подготовки. В проведенном эксперименте участвовало 94 человека.
В начале занятия, до демонстрации Jupyter Notebook, студентам предлагался входной срез, который представлял собой короткий письменный опрос из трех вопросов. После демонстрации работы инструмента, разбора четырёх типов преобразований и (по просьбе учащихся) динамических изменений матрицы проводился аналогичный выходной срез. Суммарно оба опроса заняли порядка 12 минут.
Вопросы входного среза:
Что происходит с единичным кругом при применении матрицы линейного преобразования? (открытый вопрос)
Что показывает определитель матрицы геометрически? (открытый вопрос)
Существуют ли у матрицы поворота вещественные собственные векторы? Объясните почему. (открытый вопрос)
Вопросы выходного среза включали повторно вопросы 1-3 входного среза и дополнительный вопрос с просьбой оценить по шкале от 1 до 5, насколько наглядной кажется геометрическая интерпретация линейных преобразований?
При прохождении входного среза большинство студентов затруднилось объяснить геометрический смысл определителя матрицы линейного преобразования и не смогло ответить на вопрос о собственных векторах матрицы поворота — лишь 46 человек из 94 дали правильный ответ. После демонстрации работы применения программы доля правильных ответов на вопросы 2 и 3 существенно возросла — 76 из 94 студентов корректно объяснили отсутствие вещественных собственных векторов у матрицы поворота, сославшись на отсутствие неподвижных направлений. Средняя оценка наглядности по дополнительному вопросу выходного среза составила 4,4 из 5.
Качественный анализ письменных ответов показал, что студенты на выходном срезе апеллировали к конкретным геометрическим образам, предложенным в работе, тогда как на входном срезе ответы носили преимущественно формальный алгебраический характер без подкрепления геометрическими образами (только 11 человек из 94 подкрепили свои ответы геометрической интерпретацией). На наш взгляд, это, как нельзя лучше, свидетельствует о том, что демонстрация инструмента способствует формированию именно геометрической, а не вычислительной составляющей понимания темы «Линейные операторы».
Поскольку апробация проводилась в одном лекционном потоке без контрольной выборки, то безусловно мы не можем сделать выводы о статистической значимости полученного эффекта. Тем не менее полученные результаты опросов подтверждают практическую применимость инструмента и служат основанием для планирования полноценного педагогического эксперимента с контрольной и экспериментальной группами в следующем учебном году.
Отметим, что полученные результаты качественно согласуются с данными педагогического эксперимента , показывающего, что именно визуализация матричных преобразований даёт наибольший прирост понимания по сравнению с чисто вычислительными заданиями. Кроме того, наше исследование дополняет выводы других исследователей , о том, что преодоление формализма в линейной алгебре возможно только через одновременное предъявление объекта в его символьной и графической формах, что непосредственно реализовано в нашем приложении через деформацию круга, сетки и собственных векторов.
5. Требования к программному обеспечению
Для воспроизведения разработанного программного продукта и использования их в учебном процессе необходим интерпретатор Python версии 3.8 или выше, среда Jupyter Notebook (или JupyterLab), которая позволяет объединить в одном файле теоретический материал, исполняемый код, визуализации и комментарии, что делает разработанный инструмент самодостаточным учебным пособием, а также библиотеки Python – numpy (для выполнения матричных операций, сингулярного разложения и вычисления собственных векторов) и matplotlib (для построения всех описанных геометрических моделей). Указанные библиотеки входят в стандартный дистрибутив Anaconda, что позволяет развернуть рабочее окружение за несколько минут на любом компьютере (Windows, Linux, macOS) без дополнительной настройки. Исходный код программы в формате.ipynb доступен для свободного использования и модификации и находится в открытом доступе.
6. Заключение
Разработанное нами приложение на языке Python в среде Jupyter Notebook — это реализованная попытка дать обучаемому опору в виде конкретного зрительного образа в понимании того, какую роль играют матрицы в преобразовании пространства. Отметим, что, как нам кажется, попытка оказалась удачной. Она была успешно реализована и лекциях и вызвала повышенный интерес у преподавателей и студентов. Последние отмечали, что использование этого приложения помогло им «разложить материал в голове», структурировать его и систематизировать. Первая наша модель показала, что за сингулярными числами матрицы A стоит вполне осязаемая геометрия и что сингулярные числа — это просто длины полуосей эллипса, в который преобразование превращает единичный круг. Определитель матрицы преобразования из чисто числовой абстракции превращается в то, что можно буквально измерить линейкой на рисунке — отношение площади эллипса к площади исходного круга. Самой наглядной для понимания сути линейного преобразования, по мнению студентов, была вторая модель, визуализирующая процесс деформации координатной сетки. Прямые остаются прямыми, параллельные линии переходят в параллельные, но при этом исчезают прямые углы, а расстояния меняются. Очень информативным оказалось сравнение четырёх типов преобразований, когда матрица поворота полностью сохраняет форму сетки, матрица косого преобразования скашивает, а матрица ортогонального проектирования на ось OX схлопывает пространство в прямую.
Справедливости ради, стоит отметить, что идея провести сравнительный анализ четырёх типов преобразований возникла уже по ходу разработки. Но именно он получил самый высокий отклик, поскольку три модели не просто иллюстрируют одно и то же разными способами, они дополняют друг друга. Поворот и косое преобразование имеют одинаковый определитель, равный единицы, но, как видно из рисунков, ведут себя совершенно по-разному. Вырождение одинаково «видно» во всех трёх моделях сразу, где эллипс схлопывается в отрезок, сетка превращается в прямую, а один из собственных векторов уходит в нуль. Именно это согласованное поведение всех трёх моделей и делает инструмент полезным, поскольку показывает преобразование сразу с трёх сторон и различия, которые в формулах не очевидны, становятся сразу видны.
В сравнении с существующими онлайн инструментами, позволяющими визуализировать линейные преобразования, предложенный нами программный продукт обладает одним принципиальным преимуществом — здесь все три рассматриваемые модели: круг, сетка и собственные векторы — связаны через единую матрицу преобразования, что позволяет наблюдать и пояснять учащимся три интерпретации одного преобразования одновременно и мгновенно — изменяем матрицу и видим, как синхронно изменяются эллипс, сетка и собственные векторы. Ни один из известных нам готовых инструментов не реализует именно такую связность.
Еще раз хочется подчеркнуть, что наша разработка ни в коем случае не заменяет строго академического изложения теории линейных преобразований в линейных пространствах, а является мощным графическим подкреплением для понимания материала, призванным его обогатить. Апробация на лекционных занятиях показала, что демонстрация моделей в реальном времени действительно помогает, особенно в момент объяснения того, что у матрицы поворота нет вещественных собственных векторов.
Перспективы дальнейшего исследования связаны с обобщением предложенной модели на трёхмерное пространство V3, встраиванием в лекционные курсы и практические занятия на базе РТУ МИРЭА, проведение педагогического эксперимента с контрольной и экспериментальной группами для количественной оценки влияния инструмента на качество усвоения темы, а также расширение инструмента в сторону конкретных прикладных задач: анализа главных компонентов в машинном обучении, вычисления главных осей инерции в динамике твёрдого тела, аффинных преобразований в компьютерной графике.