Исследование адаптивного оптимального комплексного финитно-временного метода фильтрации навигационных произвольных дискретных сигналов в условиях параметрической априорной неопределённости
Исследование адаптивного оптимального комплексного финитно-временного метода фильтрации навигационных произвольных дискретных сигналов в условиях параметрической априорной неопределённости
Аннотация
В данной работе рассматривается новый адаптивный финитно-временной оптимальный алгоритм фильтрации произвольных дискретных навигационных сигналов двуканальной комплексной системы с фильтром разностного сигнала в условиях широкой параметрической неопределённости, когда неизвестны законы распределения, первый и второй моменты, корреляционные функции и математические ожидания погрешностей измерителей. В представленной работе рассматриваются достоинства финитно-временного метода фильтрации сигналов по сравнению с фильтрацией Калмана. Проведено исследование и сравнение адаптивных и неадаптивных финитно-временных и Калмановского методов по показателям точности, времени переходного процесса и робастности в условиях широкой параметрической неопределённости.
1. Введение
В настоящее время алгоритмы фильтрации Калмана имеют широкое распространение при решении задач оптимальной обработки информации, в том числе и при комплексировании навигационных систем на борту летательных аппаратов. Фильтр Калмана обладает рядом достоинств, которые обосновывают его востребованность , , к которым можно отнести оптимальность по критерию минимума среднего квадрата ошибки оценки в классе любых оценок при условии наличия унимодальности и симметричности апостериорной плотности распределения , , используется рекуррентная оценка сигналов, что позволяет снизить требования к памяти устройств обработки информации. Однако фильтрация Калмана обладает и недостатками такими, как необходимость представления сигнала в пространстве состояний, требования к наличию марковского свойства оцениваемого процесса, отсутствие универсальности относительно коррелированных и некоррелированных помех измерения, необходимость решения уравнений Риккати, что заметно усложняет алгоритм, а также наличие обратной связи, приводящей к снижению запаса устойчивости фильтра.
В СПбГУАП на кафедре аэрокосмических измерительно-вычислительных комплексов был разработан новый финитно-временной метод фильтрации , , , , основанный на следствии теоремы ортогонального проецирования. Он не требует наличия свойств марковости оцениваемого процесса и представления сигнала в пространстве состояний, что делает его более универсальным , , . При определённой памяти процесса (при увеличении количества используемых предыдущих результатов измерения) дисперсия ошибки оценки совпадет с дисперсией фильтра Калмана. Финитно-временные алгоритмы имеют несколько модификаций: адаптивные и неадаптивные, с обратной связью и без неё , , , . Отсутствие обратной связи обеспечивает повышение устойчивости алгоритма. Финитно-временные методы фильтрации навигационных сигналов в условиях полной априорной неопределенности относительно полезного сигнала и помех легко реализуются как адаптивные алгоритмы . Задачей данного исследования является определение и сравнение динамических характеристик, показателей точности и робастности адаптивных финитно-временного без обратной связи и Калмановского методов фильтрации с неадаптивными методами в условиях широкой параметрической неопределённости.
2. Математическое описание исследуемых методов
Рассматривается линейная модель измерения, которая имеет вид: , , :
где i=1,2 … n, k=1, 2, Yi,k, Хi, Hi,k – случайные произвольные процессы.
Предполагается, что полезный сигнал не коррелирован с помехами и что помехи не коррелированы между собой, а также помехи имеют разные спектральные характеристики – одна высокочастотная (Hi1), другая низкочастотная (Hi2). Математическое ожидание всех процессов принято равным 0. Корреляционная функция помехи Hi2 неизвестна, а Hi1 представляет собой гауссовский белый шум, корреляционная функция которого имеет вид :
где δ – дельта-функция, ϭ – среднеквадратическое отклонения. В данной работе параметр ϭ считается неизвестным.
На вход фильтра разностного сигнала комплексной системы подаётся сигнал, описываемый следующим выражением :
В этом случае H2i является полезным сигналом, а Hi1 – помехой. Учитывая некоррелированность погрешностей, оценка неизвестной корреляционной функции осуществляется с помощью рекуррентного соотношения. Оптимальная матрица финитно-временного метода без обратной связи имеет вид :
Используя измерения (3), образуем вектор результатов наблюдения размерности n×r в i-й момент времени:
где zr = |z1r, z2r, zn-r| – векторы размерности n×1, r=i, i-1, … , i-k+1
Показатель точности финитно-временного алгоритма оценки сигнала Zi в i-ый момент времени вычисляется следующим образом :
где Tr – след матрицы, KℇЧopti – матрица корреляционных моментов ошибок оптимальных оценок размерности m∙k×m∙k.
Оптимальную по критерию минимума следа матрицы ошибок оценку X^*i в момент времени i можно вычислить по следующей формуле:
где матрица оптимальной оценки определяется следующим выражением :
являются векторами размерности, определяемыми текущими и предшествующими значениями сигналов H2,i и Zi.
Матрицу Kℇopti на основании следствия теоремы ортогонального проецирования представим как :
где – матрица r×r корреляционных моментов оптимальных оценок равна :
Матрица корреляционных моментов адаптивных оптимальных оценок представляется следующим образом:
3. Основные результаты
3.1. Исследование адаптивных финитно-временных и Калмановских методов фильтрации на точность и время переходного процесса
Моделирование проводится с помощью Mathcad 15. Исходные данные для моделирования:
1. Память процесса r = 4;
2. Объём выборки N = 2000;
3. Величина, обратная времени корреляции для барометрического измерителя высоты: α1 = 0,01 с-1 ;
4. Величина, обратная времени корреляции для радиотехнического измерителя высоты: α = 1 с-1 ;
5. Дискрет Котельникова: d = 4
На рисунке 1 представлены графики зависимости дисперсии ошибки оценки от времени.
DEA2 – дисперсия ошибки оценки адаптивного финитно-временного алгоритма без обратной связи
DEA12 – дисперсия ошибки оценки адаптивный алгоритм фильтрации Калмана
DE2 – дисперсия ошибки оценки финитно-временного алгоритма без обратной связи
DEK2 – дисперсия ошибки оценки алгоритма фильтрации Калмана
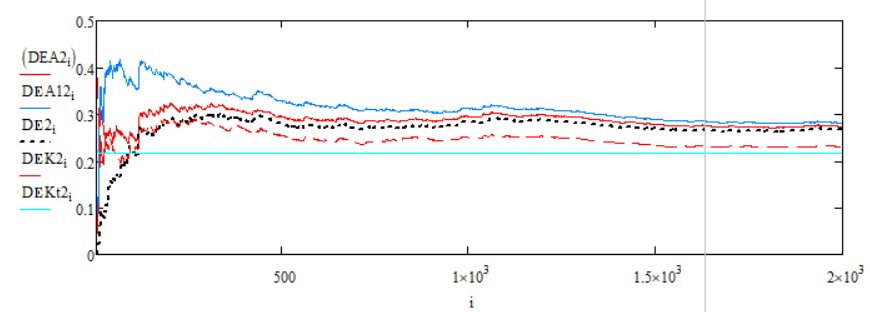
Рисунок 1 - Графики зависимости дисперсии ошибки оценки различных алгоритмов от времени
1. Адаптивный финитно-временной алгоритм без обратной связи: около 250 с;
2. Адаптивный фильтр Калмана: около 500 с;
3. Финитной-временной алгоритм без обратной связи: около 250 с;
4. Фильтр Калмана: около 500 с.
Оценим установившуюся величину дисперсии ошибки оценки каждого из алгоритмов с помощью вычислений в Mathcad:
1. Адаптивный финитно-временной алгоритм без обратной связи: 0,273;
2. Адаптивный фильтр Калмана: 0,281;
3. Финитной-временной алгоритм без обратной связи: 0,266;
4. Фильтр Калмана: 0,230.
Таким образом, адаптивный финитно-временной алгоритм без обратной связи незначительно уступает по точности неадаптивным финитно-временному и фильтру Калмана.
3.2. Исследование адаптивных финитно-временных и Калмановских методов фильтрации на робастность
Робастность – это малая чувствительность показателя качества к изменению параметров информационно-измерительной системы. В данном случае за показатель качества принята дисперсия ошибки оценки.
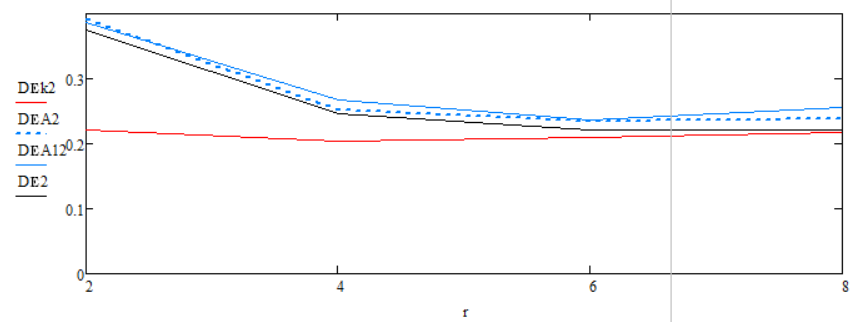
Рисунок 2 - Зависимость дисперсии ошибки оценки фильтров от изменения памяти процесса r при объёме выборки N = 2000
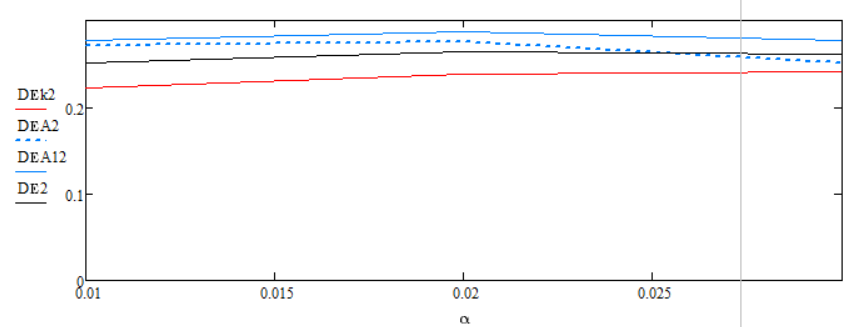
Рисунок 3 - Зависимость дисперсии ошибки оценки фильтров от изменения величины α
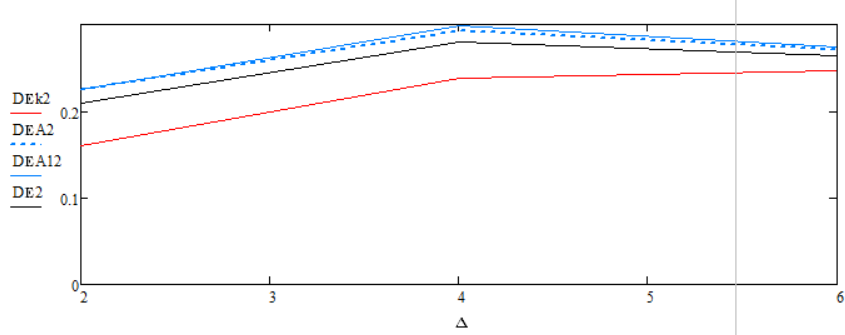
Рисунок 4 - Зависимость дисперсии ошибки оценки фильтров от изменения величины дискрета d
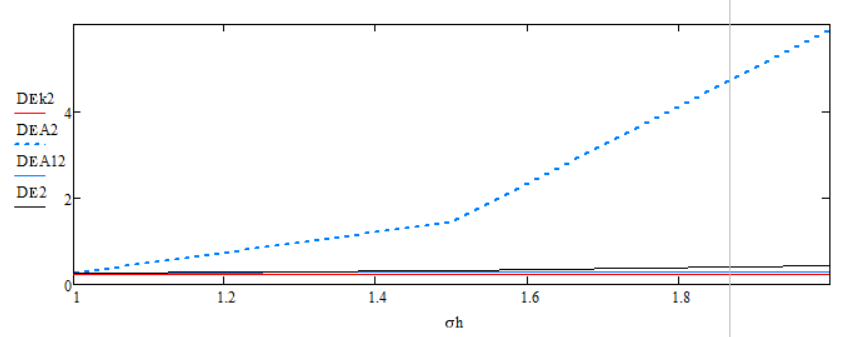
Рисунок 5 - Зависимость дисперсии ошибки оценки фильтров от изменения среднеквадратического отклонения помехи измерителей
Сравнительная характеристика исследуемых алгоритмов по показателю робастности представлена в таблице 2.
Таблица 1 - Сравнительная характеристика исследуемых адаптивных и неадаптивных алгоритмов по робастности
Параметр | Наиболее робастный (-ые) алгоритм (-ы) |
Память процесса r | Финитно-временной алгоритм |
α | Все исследуемые алгоритмы |
Дискрет d | Финитно-временной без обратной связи и адаптивный финитно-временной без обратной связи |
Среднеквадратическое отклонение помехи измерителей | Фильтр Калмана, адаптивный фильтр Калмана, финитно-временной без обратной связи |
4. Заключение
В данной работе были исследованы адаптивные и неадаптивные алгоритмы Калмана и финитно-временной обработки сигналов. Исследование показало, что в условиях широкой параметрической априорной неопределённости, когда неизвестна ни одна из двух погрешностей, адаптивные алгоритмы работают эффективно, незначительно уступая неадаптивным алгоритмам, обеспечивая вполне пригодные для комплексных систем характеристики по робастности, точности и времени переходного процесса.