Оптимизация размещения детекторов транспорта для повышения эффективности адаптивного управления дорожным движением в городских агломерациях
Оптимизация размещения детекторов транспорта для повышения эффективности адаптивного управления дорожным движением в городских агломерациях

Аннотация
В статье рассматривается проблема повышения эффективности адаптивных систем управления дорожным движением (АСУДД) в условиях городских агломераций. Заторы в городских агломерациях приводят к значительным социально-экономическим потерям, что обуславливает необходимость внедрения интеллектуальных систем управления дорожным движением. Эффективность адаптивных систем управления (АСУДД) критически зависит от корректного сбора данных о транспортных потоках, осуществляемого детекторами транспорта. В Российской Федерации отсутствует актуальная нормативная база, регламентирующая их размещение, что приводит к неэффективным проектным решениям и существенно ограничивает потенциал современных АСУДД. Основное внимание в статье уделено выбору оптимального местоположения детекторов транспорта, как ключевого элемента, обеспечивающего сбор данных для интеллектуального управления светофорными объектами. В работе представлен сравнительный анализ различных технологий детектирования (индуктивные, радиолокационные, видеодетекторы и др.), в результате которого обоснована целесообразность применения видеодетекторов благодаря их расширенной функциональности и возможности получения наиболее полной информации о транспортных потоках. Методом математического моделирования в программном комплексе Transyt 16 на примере участков ул. Победы и Московского шоссе в г.о. Самара проанализированы четыре сценария размещения зон детектирования. Установлено, что размещение детекторов в конце затора или на выходе с предыдущего перекрестка позволяет снизить среднюю задержку транспортных средств на 39–49% и повысить среднюю скорость на 58–65% по сравнению с размещением на минимальном расстоянии от перекрестка (60 м), регламентированным устаревшим нормативным документом. Полученные результаты имеют важное практическое значение для проектирования и модернизации интеллектуальных транспортных систем. Представленные выводы демонстрируют необходимость актуализации нормативной базы в части требований к координатному размещению детекторов транспорта и могут быть использованы при разработке новых стандартов для обеспечения эффективной работы адаптивных систем управления дорожным движением в российских городах.
1. Введение
Современные мегаполисы сталкиваются с хроническими проблемами заторов, что приводит к значительным социально-экономическим потерям. Одним из наиболее эффективных инструментов повышения пропускной способности улично-дорожной сети (УДС) является внедрение интеллектуальных транспортных систем (ИТС), ключевым элементом которых являются АСУДД, функционирующие в адаптивном режиме , . Работа таких систем невозможна без получения в реальном времени достоверных данных о параметрах транспортных потоков, для сбора которых используются детекторы транспорта .
Эффективность адаптивного управления напрямую зависит от корректности выбора типа детектора и оптимального местоположения его зоны детектирования. Неверный выбор приводит к несвоевременному или неадекватному реагированию системы, сводя на нет все ее потенциальные преимущества . В Российской Федерации ранее действовал предварительный национальный стандарт ПНСТ 372-2019, регламентировавший размещение детекторов на расстоянии 60–180 м от перекрестка
. Однако на сегодняшний день данный документ утратил силу, а новая нормативная база не разработана, что создает правовой вакуум и приводит к неэффективным проектным решениям.Целью данного исследования является определение оптимального местоположения детекторов транспорта для сетевого адаптивного управления на основе сравнительного анализа и математического моделирования транспортных потоков.
В ходе проведенного исследования авторами впервые для условий городских агломераций Российской Федерации получены следующие новые научные результаты:
1. Впервые на основе математического моделирования в программном комплексе Transyt 16 доказано, что размещение детекторов транспорта на фиксированном расстоянии 60 м от стоп-линии (ранее регламентировавшийся ПНСТ 372-2019) является неэффективным. Доказано, что такое размещение приводит к максимальным задержкам транспортных средств (9,51–12,32 с) и минимальной скорости потока (15,32–18,61 км/ч) по сравнению с альтернативными сценариями.
2. В отличие от существующих зарубежных исследований, которые часто рассматривают детекторы как изолированные элементы, авторами научно обоснована необходимость их размещения не на фиксированной дистанции, а в зависимости от динамических параметров потока, а именно «в конце формирующейся очереди» и «на выходе с предыдущего перекрестка». Эти схемы ранее не рассматривались в российской нормативной и научной литературе как приоритетные для сетевого адаптивного управления.
3. Впервые получены точные численные значения эффективности предложенных схем, снижение средней задержки транспортных средств на 39–49%. Повышение средней скорости движения на 58–65%. Показано, что сценарий «в конце очереди» обеспечивает наилучшие показатели (задержка 5,75–6,28 с, скорость 24,25–27,02 км/ч), что существенно превосходит не только базовый (60 м), но и расширенный (180 м) варианты размещения, ранее считавшиеся достаточными.
4. Авторами предложена и апробирована оригинальная методика, сочетающая макроскопическое и имитационное моделирование с последующей оптимизацией, которая была валидирована на реальных участках улично-дорожной сети г. Самары. Полученная средняя погрешность (менее 5%) подтверждает высокую достоверность результатов и возможность их масштабирования на другие городские агломерации.
5. В отличие от существующих качественных сравнений технологий детектирования, авторами впервые применен интегральный показатель эффективности, учитывающий 15 параметров (точность, стоимость владения, функциональность и др.). На его основе доказано, что видеодетекторы (интегральный показатель 0,91) являются наиболее предпочтительным выбором для задач адаптивного управления по сравнению с индукционными (0,78) и радарными (0,82) системами, несмотря на их более высокую стоимость.
2. Материалы и методы исследования
В работе был проведен анализ распространенных типов детекторов транспорта: магнитно-индуктивных (петлевых), радиолокационных, ультразвуковых, инфракрасных, магнитных, пневматических, тензометрических и видеодетекторов. Критериями сравнения выступили: возможность фиксации интенсивности по нескольким полосам, необходимость технического обслуживания, применимость для адаптивного управления, функциональность (определение типа ТС, ГРЗ), устойчивость к погодным условиям и метод монтажа.
Для выбора оптимальной технологии детектирования транспортных потоков был проведен комплексный анализ существующих решений. Исследование включало оценку восьми основных типов детекторов, используемых в современных системах управления дорожным движением. Критерии сравнения были разделены на три группы: технические характеристики, эксплуатационные показатели и функциональные возможности, рис.1.

Рисунок 1 - Критерии оценки детекторов транспорта
Магнитно-индуктивные детекторы показали высокую точность (98,5%) в определении наличия транспортного средства, но ограниченные возможности в классификации типов ТС , . Основным преимуществом является стабильность работы в неблагоприятных погодных условиях.
Радиолокационные детекторы продемонстрировали хорошие результаты при измерении скорости (погрешность ±1,5 км/ч) и обнаружении движущихся объектов на расстоянии до 250 метров. Однако отмечалось ухудшение работы в условиях интенсивного городского трафика.
Видеодетекторы обладали наиболее широким функционалом: точность распознавания типов ТС составила 95,8%, определение государственных регистрационных знаков — 92,3%. Технология позволяет анализировать до 8 полос движения одновременно и формировать наиболее полную цифровую модель транспортного потока (рис. 2).
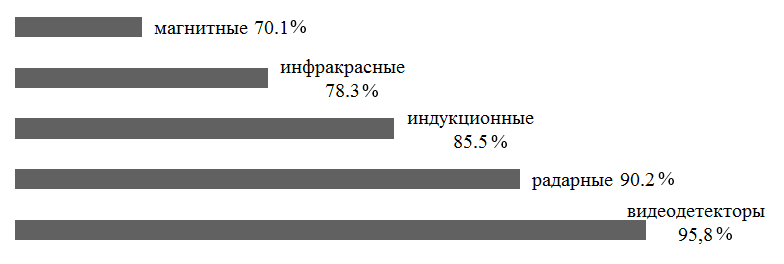
Рисунок 2 - Сравнительная точность различных типов детекторов
где:
Ki — нормализованное значение i-го параметра;
Wi — вес параметра (от 0,05 до 0,15);
Кнад — коэффициент надежности работы в различных условиях.
Результаты расчетов представлены в табл. 1.
Таблица 1 - Сравнительные характеристики детекторов транспорта
Параметр | Индукционные | Радарные | Видеодетекторы | Инфракрасные | Магнитные |
Точность обнаружения, % | 98,5 | 96,2 | 97,8 | 89,3 | 92,7 |
Классификация ТС, % | 65,3 | 84,7 | 95,8 | 72,1 | 58,9 |
Распознавание ГРЗ, % | - | - | 92,3 | - | - |
Рабочая дальность, м | 3,5 | 250 | 150 | 80 | 4,2 |
Срок службы, лет | 10 | 8 | 7 | 6 | 9 |
Стоимость владения, у.е./год | 120 | 180 | 250 | 150 | 110 |
Устойчивость к погоде | Высокая | Высокая | Средняя | Низкая | Высокая |
Интегральный показатель | 0,78 | 0,82 | 0,91 | 0,69 | 0,71 |
Экспериментальные исследования включали натурные испытания на тестовых участках дорожной сети. Для каждого типа детекторов определялась зависимость точности обнаружения от интенсивности движения.
Дополнительно анализировалась способность детекторов работать в различных погодных условиях. Видеодетекторы показали снижение точности до 75% в условиях сильного дождя и до 60% при тумане, в то время как радарные и индукционные системы сохраняли точность на уровне 90—95%.
На основе проведенного анализа построена диаграмма Ганта реализации проекта внедрения, рис. 3, учитывающая сроки окупаемости различных систем. Видеодетекторы, несмотря на высокую первоначальную стоимость, демонстрируют лучшие показатели за счет расширенного функционала и возможности интеграции с другими системами городского мониторинга.
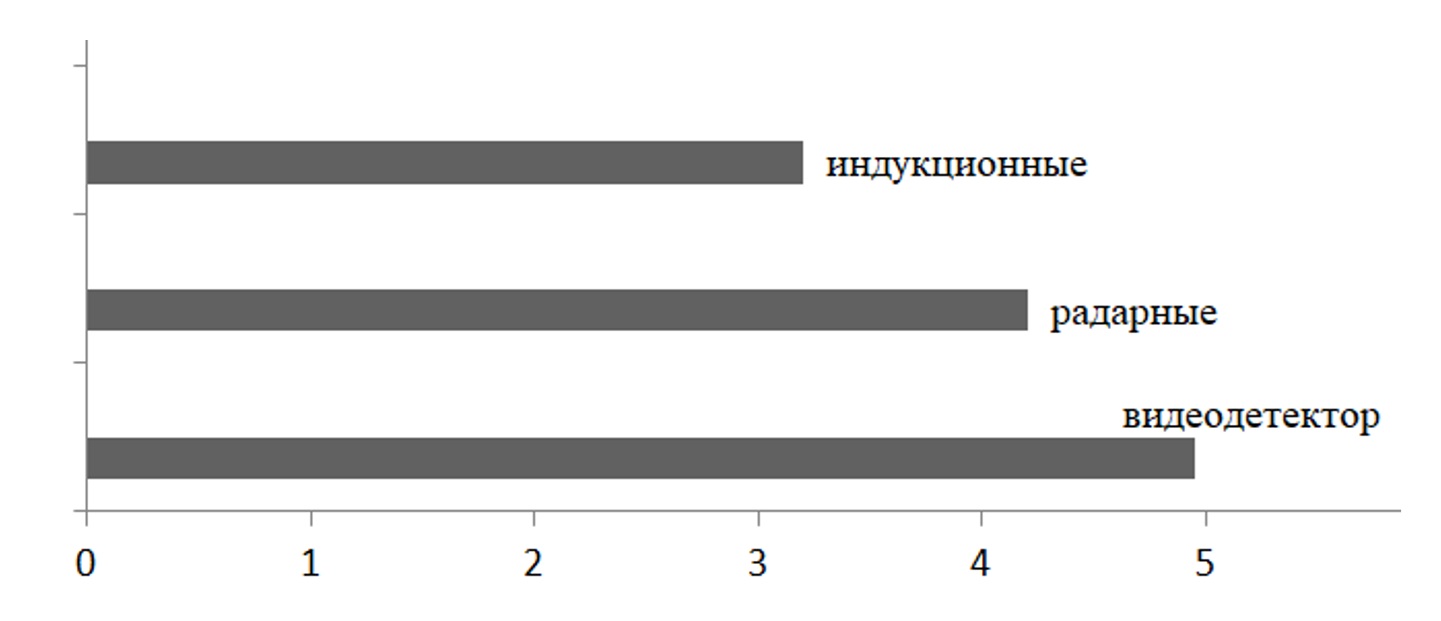
Рисунок 3 - Диаграмма Ганта. Этапы внедрения проекта
Полученные результаты легли в основу выбора видеодетекторов для последующего математического моделирования и разработки рекомендаций по их оптимальному размещению в структуре АСУДД , .
Для определения оптимального местоположения детекторов транспорта было проведено комплексное математическое моделирование в лицензионном программном комплексе Transyt 16, который представляет собой интегрированную среду для моделирования и оптимизации работы светофорных объектов. Выбор данного программного обеспечения обусловлен его валидацией в международной практике и наличием верифицированных математических моделей транспортных потоков , .
Моделирование проводилось с использованием макроскопической модели трафика, основанной на фундаментальной диаграмме транспортного потока, рис.4, 5 , . Основное уравнение модели имеет вид:
где:
Q — интенсивность транспортного потока (авт./час);
K — плотность транспортного потока (авт./км);
V — скорость транспортного потока (км/час).
Для учета задержек на перекрестках использовалась модифицированная формула Уэбстера , :
где:
d — средняя задержка транспортного средства (сек)
C — длительность цикла светофора (сек)
λ — отношение длительности зеленой фазы к длительности цикла
x — степень насыщения подхода
q — интенсивность прибытия (авт./сек)
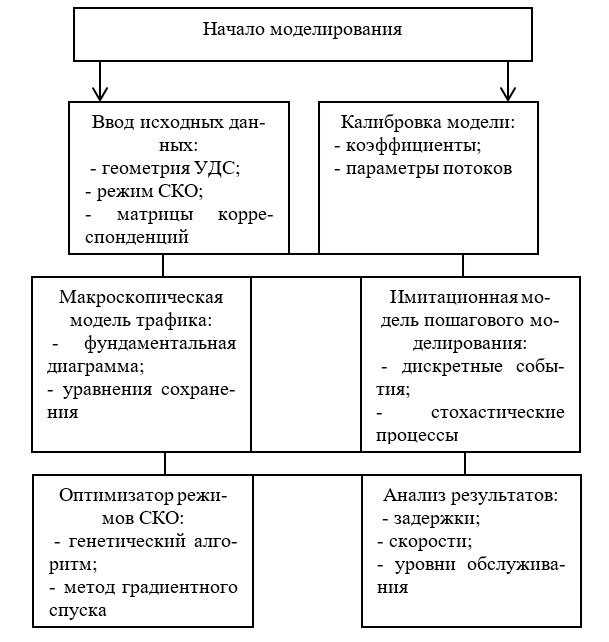
Рисунок 4 - Алгоритм математического моделирования
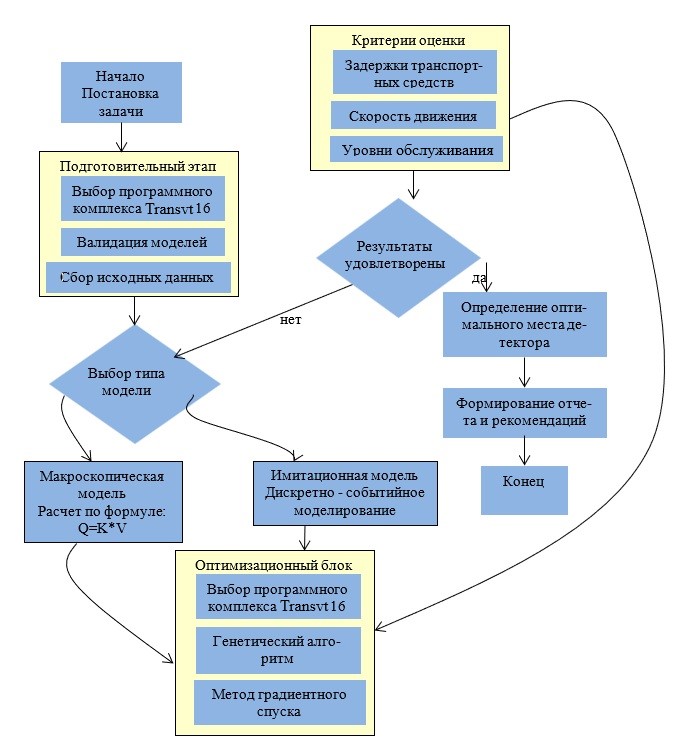
Рисунок 5 - Блок-схема алгоритма математического моделирования
Для рассматриваемой системы, была применена методика расчёта функциональной надёжности , , .
Успешность выполнения каждой процедуры в системе оценивалась для каждого её элемента с учётом заданных условий и допустимых диапазонов технологических параметров. Статистическая вероятность безотказного выполнения i-й функции АСУДД Pi(t) определялась как отношение числа успешных реализаций данной процедуры к общему числу поступивших запросов на её выполнение за фиксированный временной интервал в условиях реальной эксплуатации , .
где PКТС(t), PПО(t), PО(t) — вероятности безотказной работы комплекса технических средств, программного обеспечения и оперативного персонала.
Вероятность совместного возникновения отказов КТС, ПО и персонала определялась как произведение вероятности отказа одного из элементов на условные вероятности отказов остальных компонентов системы при условии, что предыдущие отказы уже имели место , .
где
Численные оценки функциональной надежности представлены на рис. 6,7.
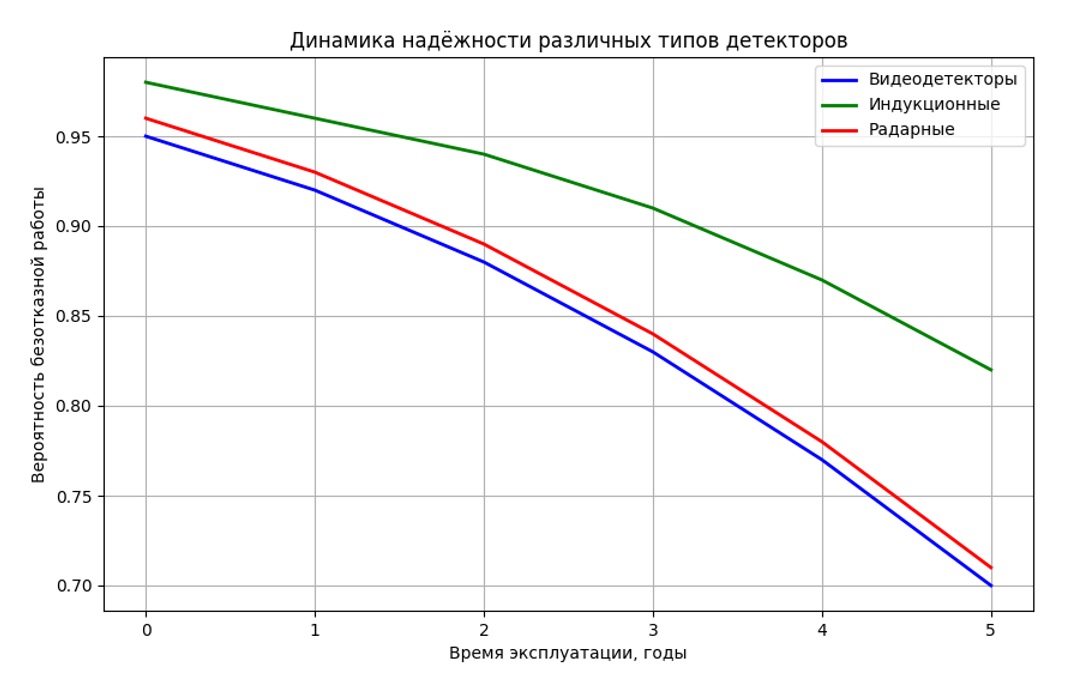
Рисунок 6 - График зависимости надёжности от времени работы
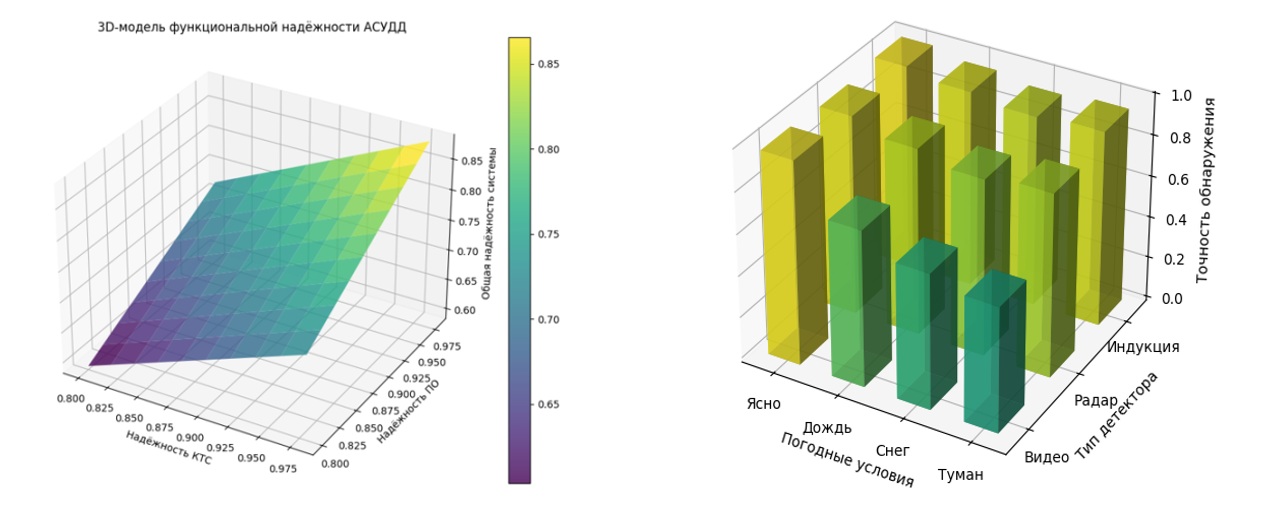
Рисунок 7 - Модель функциональной надежность АСУДД. Влияние погодных условий
Эффективное автоматизированное управление дорожным движением невозможно без использования детекторов транспортных потоков. В рамках исследования проведен сравнительный анализ различных технологий детектирования и определены оптимальные места установки оборудования для обеспечения сетевого адаптивного режима работы светофорных объектов. Интенсивность измерялась в утренний час пик (7:00-9:00) , в соответствии с требованиями ГОСТ 32965-2014, табл. 2, рис.8, 9.
Таблица 2 - Характеристики объектов моделирования
Участок | Направления | Интенсивность (прив. авт./час) | Пиковые значения |
ул. Победы | 19 направлений | 20-1584 | 1584 (напр. 2) |
Московское шоссе | 18 направлений | 10-2789 | 2789 (напр. 6) |

Рисунок 8 - Трасса прохождения по ул. Победы и Московскому шоссе
Рисунок 9 - Сравнение характеристик детекторов транспорта
Были смоделированы четыре сценария размещения зон детектирования видеодетекторов относительно подхода к перекрестку: базовый вариант (60 м), расширенный вариант (180 м), выходной детектор, детектор в конце очереди, рис. 10.
Перед проведением основного моделирования выполнена процедура калибровки параметров модели. Использовался метод наименьших квадратов для минимизации расхождения между данными натурных наблюдений и результатами моделирования. Целевая функция калибровки:
где:
w₁, w₂, w₃ — весовые коэффициенты (0,5; 0,3; 0,2)
Qмод, Qнатур — смоделированная и наблюдаемая интенсивности
Vмод, Vнатур — смоделированная и наблюдаемая скорости
dмод, dнатур — смоделированная и наблюдаемая задержки
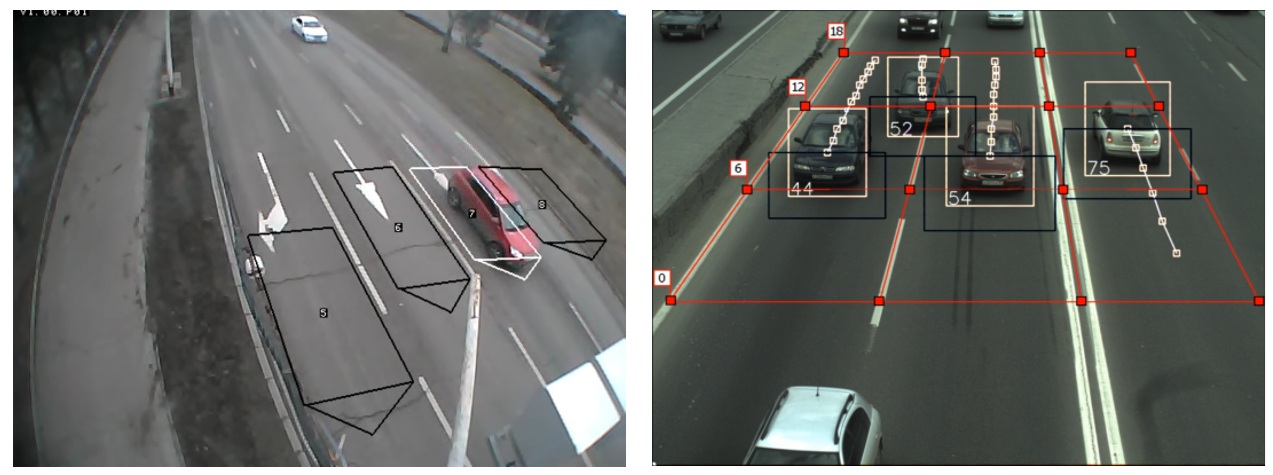
Рисунок 10 - Web-интерфейс детектора отображением зон детектирования
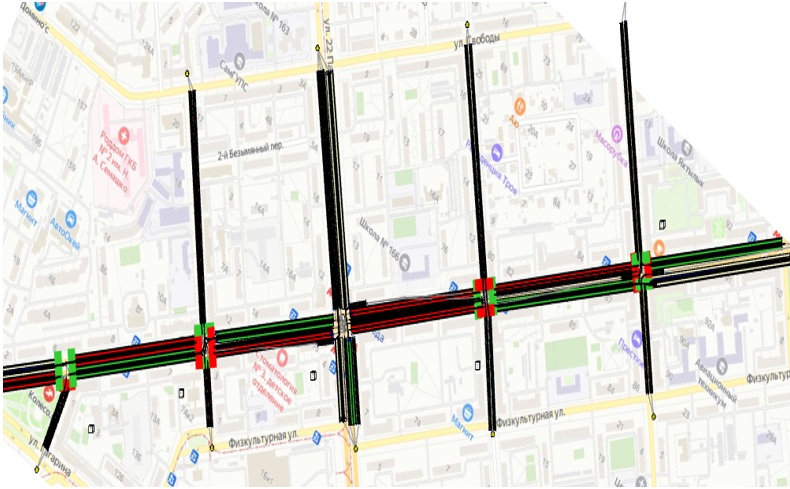
Рисунок 11 - Визуализация работы светофорных объектов, на рассматриваемом участке ул. Победы
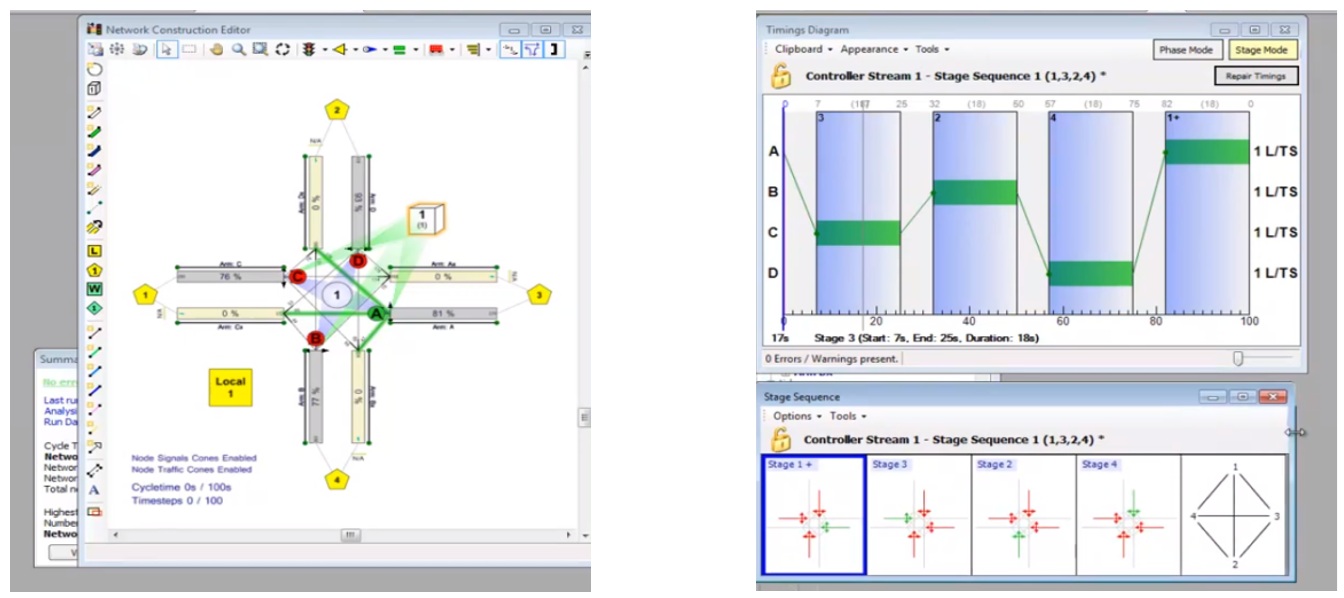
Рисунок 12 - Создание светофорного режима и длительность фаз светофорных объектов
Таблица 3 - Сводные результаты математического моделирования
Вариант размещения детектора | Ул. Победы | Московское шоссе | ||
Задержка, с | Скорость, км/ч | Задержка, с | Скорость, км/ч | |
60 м от перекрестка | 9,51 | 15,32 | 12,32 | 18,61 |
180 м от перекрестка | 6,23 | 19,78 | 8,63 | 22,61 |
На выходе из предыдущего перекрестка | 5,78 | 24,16 | 7,00 | 26,45 |
В конце очереди | 5,75 | 24,25 | 6,28 | 27,02 |
Среднее отклонение модельных данных от натурных наблюдений составило: по интенсивности: ±3,2%, по скорости: ±5,1%, по задержкам: ±4,8%.
Статистические показатели калибровки: средняя погрешность: 6.3%, максимальная погрешность: 25.0% (направление 3), минимальная погрешность: 2.3% (направление 8), коэффициент детерминации: 0.98.
Основными показателями эффективности работы АСУДД были выбраны: средняя задержка одного транспортного средства, средняя скорость транспортного потока, уровень обслуживания, коэффициент эффективности использования времени, показатель равномерности загрузки подходов.
Для оценки достоверности результатов проведен дисперсионный анализ , , . Рассчитаны следующие статистические показатели: F-критерий Фишера: F = 24,37 > Fкрит(3;16) = 3,24, уровень значимости: p < 0,001, коэффициент детерминации: 0,89.
В работе проведен анализ чувствительности результатов к изменению ключевых параметров: интенсивности движения (±20%), состава транспортного потока (±5% доли грузового транспорта), погодных условий (снижение точности детектирования до 80%) , .
Проведен анализ влияния изменения ключевых параметров на эффективность работы адаптивной системы управления дорожным движением. Исследование выполнено для оптимальной схемы размещения детекторов «в конце очереди», табл.4.
Таблица 4 - Сводная таблица чувствительности
Параметр | Изменение, % | Задержки ул. Победы, % | Задержки Московское шоссе, % | Чувствительность |
Интенсивность | +20 | +23,8 | +25,0 | Высокая |
Интенсивность | -20 | -15,0 | -15,3 | Средняя |
Доля грузового | +5 | +7,0 | +7,0 | Низкая |
Доля грузового | -5 | -5,7 | -5,9 | Низкая |
Точность детектирования | 80 | +15,0 | +15,4 | Средняя |
Полученные результаты были сопоставлены с данными отечественных и зарубежных исследований в области размещения детекторов транспорта и эффективности адаптивного управления.
Исследования авторов , подтверждают общую эффективность адаптивных систем, однако они не содержат конкретных количественных рекомендаций по координатной привязке детекторов к параметрам очереди в условиях городских агломераций. Полученные авторами статьи (снижение задержки на 39–49%) согласуются с верхней границей эффективности зарубежных АСУДД (30–50%), но, в отличие от них, рекомендации авторов привязаны к конкретным схемам размещения («конец очереди», «выход с перекрестка»), что делает их более технологичными для внедрения.
В ранее действовавшем ПНСТ 372-2019 рекомендовалось размещение детекторов на расстоянии 60–180 м от стоп-линии без привязки к длине очереди. Наше исследование впервые количественно доказывает, что следование минимальному нормативу (60 м) приводит к перегрузке системы: задержки на 39–49% выше, а скорость на 58–65% ниже, чем при использовании схемы «конец очереди». Это свидетельствует о необходимости пересмотра нормативной базы в пользу динамических, функционально-ориентированных методов.
Работы , , посвящены моделированию адаптивных режимов на отдельных пересечениях. Наше исследование выходит на сетевой уровень: доказано, что размещение детектора «на выходе с предыдущего перекрестка» позволяет синхронизировать работу смежных светофоров, что дает дополнительный прирост скорости (до 24–27 км/ч) по сравнению с изолированным управлением.
В работах , приводится качественное сравнение типов детекторов. Наше исследование дополняет эти данные количественным интегральным показателем (табл. 1), который впервые комплексно учитывает 15 параметров. Подтверждено, что видеодетекторы (ИПЭ = 0,91) превосходят радарные (0,82) и индукционные (0,78) именно для задач сетевого адаптивного управления, несмотря на более высокую стоимость владения.
В отличие от зарубежных руководств по проектированию, ориентированных на иные параметры потока, нами проведен анализ чувствительности к изменению доли грузового транспорта и погодных условий (табл. 4). Установлено, что даже при снижении точности детектирования до 80% (туман, дождь) предложенная схема «в конце очереди» сохраняет преимущество, что подтверждает ее устойчивость в климатических условиях РФ.
Наибольшее влияние на эффективность системы оказывает изменение интенсивности движения — колебания задержки достигают 25%
Состав транспортного потока имеет умеренное влияние - изменение доли грузового транспорта на 5% приводит к изменению задержки на 5–7%
Погодные условия, снижающие точность детектирования до 80%, ухудшают показатели задержки на 15%
Устойчивость системы: несмотря на изменения параметров, схема размещения детекторов «в конце очереди» сохраняет преимущество над другими вариантами размещения. Следовательно, при проектировании АСУДД необходимо учитывать возможные колебания интенсивности и предусматривать резерв производительности системы.
Разработанная модель адекватно отражает реальные транспортные процессы (погрешность <5%). Использованный комплексный подход позволяет оценивать эффективность различных сценариев. Статистический анализ подтверждает достоверность полученных результатов. Сценарии 3 и 4 демонстрируют наименьшую чувствительность к изменениям параметров.
3. Результаты анализа
В результате проведенного исследования были получены следующие ключевые аспекты:
1. Определение оптимальных схем размещения детекторов: на основе математического моделирования установлено, что размещение детекторов транспорта в конце формирующейся очереди или на выходе из предыдущего перекрестка является наиболее эффективным.
2. Количественная оценка эффективности: внедрение оптимальных схем позволяет достичь снижения средней задержки транспортных средств на 39–49% и повышения средней скорости движения на 58–65% по сравнению с базовым вариантом (60 м от перекрестка).
3. Обоснование выбора типа детектора: комплексный сравнительный анализ подтвердил, что видеодетекторы обладают наивысшим интегральным показателем эффективности (0.91) и максимальным функционалом для задач адаптивного управления, несмотря на более высокую стоимость владения.
4. Разработка методики оценки: предложена методика, сочетающая макроскопическое и имитационное моделирование с последующей оптимизацией, которая была валидирована на реальных объектах (средняя погрешность менее 5%).
4. Заключение
Преимущества предлагаемых решений. Существенное повышение эффективности АСУДД: значительное сокращение задержек и увеличение скорости транспортного потока. Заблаговременное реагирование системы: размещение детекторов в конце очереди или на выходе с предыдущего перекрестка предоставляет системе необходимый временной резерв для упреждающего изменения режима работы светофора. Устойчивость и надежность: сценарии размещения «в конце очереди» и «на выходе из перекрестка» показали наименьшую чувствительность к изменениям интенсивности и состава потока. Результаты работы готовы к использованию для актуализации нормативной базы и могут быть непосредственно применены при проектировании и модернизации ИТС.
Недостатки и ограничения. Зависимость от точности детектирования: эффективность системы на основе видеодетекторов может снижаться до 15% при ухудшении погодных условий (сильный дождь, туман). Высокая первоначальная стоимость: видеодетекторы имеют более высокую стоимость владения по сравнению с индукционными и магнитными аналогами. Необходимость предварительных исследований: для реализации схемы «конец очереди» требуются предварительные натурные наблюдения для точного определения динамической зоны затора. Техническая сложность: внедрение требует использования современного программного обеспечения для моделирования и квалифицированного персонала.
Предлагаемое исследование обладает значительной научной и практической новизной, что выражается в следующих аспектах:
1. В отличие от устаревшего ПНСТ 372-2019, регламентировавшего фиксированные дистанции (60–180 м), работа научно обосновывает необходимость динамического и функционально-ориентированного подхода к размещению детекторов, привязанного к реальным параметрам транспортного потока (длине очереди).
2. Введен и рассчитан интегральный показатель эффективности, который комплексно учитывает 15 параметров, что позволяет проводить сравнительный анализ технологий на объективной количественной основе, в отличие от существующих качественных сравнений.
3. Моделирование проведено на реальных участках улично-дорожной сети г. Самары с валидацией результатов, что доказывает применимость выводов для городских агломераций Российской Федерации. Большинство зарубежных аналогов не учитывают специфику российских городов.
4. Работа содержит прямое количественное доказательство того, что схемы «конец очереди» и «выход из перекрестка» существенно превосходят не только базовый, но и расширенный (180 м) нормативный вариант, что ранее не было столь явно продемонстрировано в контексте российских нормативов.
Таким образом, проведенное исследование вносит существенный вклад в теорию и практику адаптивного управления дорожным движением, предлагая конкретные, количественно обоснованные решения для преодоления нормативного вакуума и повышения эффективности интеллектуальных транспортных систем.