ПРИМЕНЕНИЕ РОБОТОТЕХНИЧЕСКИХ НАБОРОВ В ФИЗИЧЕСКИХ ЭКСПЕРИМЕНТАХ
Саранин В.А.1, Кельдышев Д.А.2, Иванов Ю.В.3
1ORCID: 0000-0002-4097-2440, Доктор физико-математических наук, 2ORCID: 0000-0001-5253-7748, Старший преподаватель, 3ORCID: 0000-0002-2193-043, Кандидат педагогических наук, Глазовский государственный педагогический институт им. В.Г. Короленко
Работа выполнена при финансовой поддержке РФФИ и Удмуртской Республики в рамках научного проекта № 17-16-18017
ПРИМЕНЕНИЕ РОБОТОТЕХНИЧЕСКИХ НАБОРОВ В ФИЗИЧЕСКИХ ЭКСПЕРИМЕНТАХ
Аннотация
Робототехнический набор типа LEGO используется при проведении двух физических экспериментов. Первый эксперимент связан с явлением скольжения постоянного магнита по немагнитной проводящей пластине. Высокоточное автоматизированное измерение времени скольжения позволило подтвердить постоянство скорости скольжения и определить ее величину. Во втором эксперименте исследовалось скатывание трех стальных шаров разного диаметра по наклонному желобу. Измерение времени скатывания показало, что оно одинаково для всех шаров. Также с точностью до 5 % определен множитель 0,4 в моменте инерции шаров.
Ключевые слова: физические эксперименты с робототехническими наборами, скольжение магнита по проводнику, скатывание шаров по наклонной плоскости.
Saranin V.A.1, Keldyshev D.A.2, Ivanov Yu.V.3
1ORCID: 0000-0002-4097-2440, PhD in Physics and Mathematics, 2ORCID: 0000-0001-5253-7748, Senior Lecturer, 3ORCID: 0000-0002-2193-043, PhD in Pedagogy, Glazov State Pedagogical Institute named after V.G. Korolenko
The work was carried out with the financial support of the RFBR and the Udmurt Republic within the framework of the scientific project No. 17-16-18017
APPLICATION OF ROBOTICAL SETS IN PHYSICAL EXPERIMENTS
Abstract
A robotic LEGO type set is used in two physical experiments. The first experiment is related to the phenomenon of sliding a permanent magnet over a non-magnetic conducting plate. High-precision automated measurement of the sliding time allowed confirming the constancy of the sliding speed and determining its magnitude. In the second experiment, the sliding of three steel balls of different diameters along a shoot was considered. The measurement of the sliding time showed that it is the same for all balls. With an accuracy of up to 5%, a factor of 0.4 is determined in the moment of the balls inertia.
Keywords: physical experiments with robotic sets, sliding the magnet along a conductor, sliding balls along a shoot.
В настоящее время робототехника является важнейшим направлением научно-технического прогресса. Она тесно связана с такими науками как физика, электроника, программирование. Ее развитие способствует созданию новых автоматизированных технологий и искусственного интеллекта. Поэтому очень важно и актуально внедрять элементы робототехники в образовательный процесс школ и вузов естественнонаучного направления [1], [2], [3], [4].
Знакомство с робототехническими наборами целесообразно проводить на основе реальных, например, физических опытов. В частности, известно, что постоянный магнит, движущийся по немагнитной проводящей поверхности (например, из алюминия или дюралюминия), тормозится и движется медленно, визуально с постоянной скоростью. Простой эксперимент со скользящим магнитом приведен в [5]. Представляет интерес, используя робототехнический набор, экспериментально подтвердить факт постоянства скорости и найти ее.
Прежде дадим упрощенное теоретическое объяснение явлению. Поскольку важно относительное движение магнита и проводника будем считать, что проводник в виде стержня длиной l может скользить по длинным проводящим рельсам, замкнутым на сопротивление R во внешнем магнитном поле индукцией В (рис. 1). Подобная задача рассмотрена, например, в [6, С. 163] и [7, С. 391].
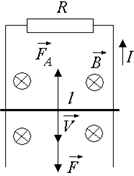
Рис. 1 – Схема движения проводящей перемычки в магнитном поле
Пусть стержень начинает двигаться под действием внешней силы ![]() . Как только начнется движение, на свободные заряды в проводящем стержне будет действовать сила Лоренца
. Как только начнется движение, на свободные заряды в проводящем стержне будет действовать сила Лоренца ![]() (υ - скорость движения стержня), направленная вправо (на положительные заряды, на отрицательные − влево), то есть по стержню пойдет ток. На этот ток со стороны внешнего магнитного поля будет действовать сила Ампера
(υ - скорость движения стержня), направленная вправо (на положительные заряды, на отрицательные − влево), то есть по стержню пойдет ток. На этот ток со стороны внешнего магнитного поля будет действовать сила Ампера ![]() , направленная вверх, то есть в сторону противоположную движущей силе F. По мере увеличения скорости стержня будет расти и сила Лоренца, следовательно, и сила тока, и сила Ампера. Наконец наступит момент, когда силы F и FA будут равны, и скорость стержня далее расти не будет. При этом работа внешней силы F за время Δt переходит в тепло:
, направленная вверх, то есть в сторону противоположную движущей силе F. По мере увеличения скорости стержня будет расти и сила Лоренца, следовательно, и сила тока, и сила Ампера. Наконец наступит момент, когда силы F и FA будут равны, и скорость стержня далее расти не будет. При этом работа внешней силы F за время Δt переходит в тепло:
![]() (1)
(1)
Таким образом, чем больше индукция магнитного поля, тем меньше установившаяся скорость движения стержня. Сила Ампера в данном случае является силой сопротивления и уменьшает скорость движения проводника в магнитном поле или магнита по проводнику.
Важнейшим свойством этого явления можно считать постоянство скорости движения магнита. Для экспериментального установления этого факта была собрана установка на основе робототехнического набора LEGO Mindstorms education EV3 (см., например, [8]), показанная на рис. 2. Цифрами на нем обозначены: 1 – микроконтроллер, 2 – сервопривод для автоматического запуска магнита, 3 – датчик цвета, 4 – наклонная плоскость, 5. – каркас-держатель всех элементов. Для опытов использовался ниодимовый магнит в виде таблетки диаметром 1 см и толщиной 2 мм. Сверху на него прицеплялась ярко желтая шайбочка для срабатывания датчика цвета. В качестве наклонной плоскости использовался дюралюминиевый уголок.
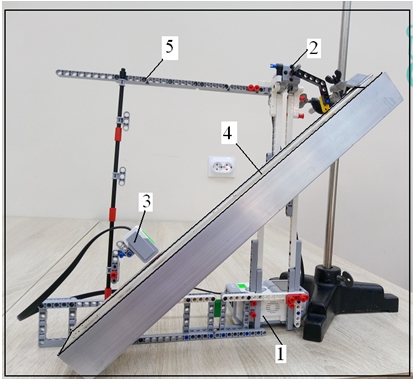
Рис. 2 – Фото экспериментальной установки для исследования скольжения магнита по наклонной плоскости
Для срабатывания сервопривода и датчика цвета составлялась компьютерная программа для микроконтроллера в среде EV3-G (поставляется вместе с робототехническим набором), с помощью которой измерялось время прохождения магнитом расстояния от шлагбаума сервопривода до центра светового пятна датчика цвета. Время с точностью до тысячной доли секунды высвечивалось на экране микроконтроллера. Датчик цвета устанавливался в трех разных местах вдоль наклонной плоскости. В каждой позиции проводилось 10 измерений времени, находилось среднее значение и погрешность. Для примера укажем: расстояние в 210 мм магнит с шайбочкой проходил за время 0,791 с, шайбочка без магнита проходила это же расстояние за время 0,422 с. Расстояния измерялись миллиметровой рулеткой. По этим данным вычислялась скорость магнита
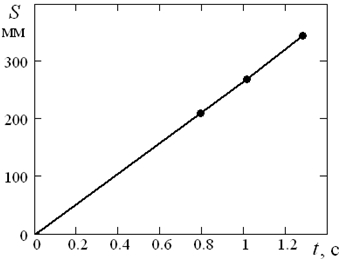
Рис. 3 – Зависимость расстояния, пройденного магнитом, от времени. Точки соответствуют экспериментальным данным
На рис. 3 точками показаны результаты измерений. Видно, что все три точки ложатся на прямую, проходящую через начало координат. Это свидетельствует о постоянстве скорости скольжения магнита. Для каждой из точек получились следующие значения скоростей (снизу вверх):
![]() (4)
(4)
Другим поучительным примером использования данного набора по робототехнике можно считать исследование скатывания шаров с наклонной плоскости. Дело в том, что все шары с заданной наклонной плоскости скатываются с одним и тем же ускорением (в условиях, когда нет проскальзывания и силой сопротивления воздуха можно пренебречь).
Покажем это теоретически. На шар действуют три силы, показанные на рис. 4. Запишем второй закон Ньютона в проекции на ось и основное уравнение вращательного движения относительно точки С:
![]() (6)
(6)
Отсюда нетрудно получить
![]() (7)
(7)
Это же результат можно получить, используя закон сохранения энергии [9, С. 163]. Момент инерции шара равен ![]() , поэтому величина
, поэтому величина ![]() и для заданной наклонной плоскости величина ускорения постоянна и одинакова для всех шаров.
и для заданной наклонной плоскости величина ускорения постоянна и одинакова для всех шаров.
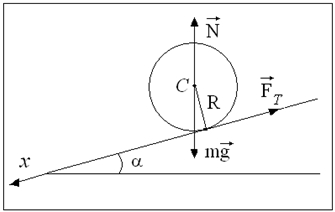
Рис. 4 – Схема скатывания шара по наклонной плоскости
В опытах по определению ускорения шаров использовался тот же набор по робототехнике, только датчик цвета заменялся на датчик касания, а наклонная плоскость была в виде желоба, на конце которого закреплялся датчик касания. Скатывались три стальных шара радиусами 10 мм, 18 мм и 24 мм. Для каждого шара производилось по 10 измерений времени скатывания. Среднее время скатывания оказалось равным (1,19 ± 0,01) с, (1,18 ± 0,01) с, (1,20 ± 0,01) с соответственно для каждого шара. Видно, что в пределах погрешности оно одинаково и в среднем равно с. Ускорение шаров вычислялось по формуле
![]() (8)
(8)
где S =565 мм – длина скатывания. Высота, с которой скатывались шары была равна h=66 мм. Используя эти данные и формулы (7), (8) можно найти экспериментальную величину I, то есть фактически экспериментально определить момент инерции шара. Имеем
![]() (9)
(9)
На нижнем пределе величина I совпадает с теоретическим значением.
Отметим, что это исследование можно представить как лабораторную работу по определению момента инерции шара [10].
Таким образом, проведенные исследования показали эффективность использования робототехнических наборов типа LEGO при проведении физических экспериментов.
Список литературы / References
- Юревич Е. И. Основы робототехники — 2-е изд., перераб. и доп. / Е.И. Юревич. — СПб.: БХВ-Петербург, 2005. — 416 с.
- Филиппов С.А. Робототехника для детей и родителей / С.А. Филиппов. − СПб.: Наука, 2013. − 320 с.
- Карпутина А.Ю. Образовательная робототехника / А.Ю. Карпутина // Современные научные исследования и инновации. − 2016. − № 12 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2016/12/74896 . (дата обращения: 04.06.2017).
- Гайсина И.Р. Развитие робототехники в школе / И.Р. Гайсина // Педагогическое мастерство (II): материалы междунар. заоч. науч. конф. – М.: Буки-Веди, 2012. – С. 105-107.
- Саранин В.А. Экспериментальные исследовательские задания по физике. 7 – 11 классы / В.А. Саранин, Ю.В. Иванов. − М.: ВАКО, 2015. – C. 34.
- Иродов И.Е. Задачи по общей физике: Учеб. пособие. – 2 изд., перераб. / И.Е. Иродов. – М.: Наука, 1988. − С. 163.
- Физика: 3800 задач для школьников и поступающих в вузы / Авт.-сост. Н.В. Турчина, Л.И. Рудакова, О.И. Суров и др. – М.: Дрофа, 2000. – С. 391.
- Белиовский Н.А. Использование LEGO-роботов в инженерных проектах школьников. Отраслевой подход / Н.А. Белиовский, Л.Г. Белиовская. – М.: ДМК-Пресс, 2016. – 88 с.
- Все решения к «Сборнику задач по общему курсу физики» В.С. Волькенштейн. В 2 кн. Кн. 1. – М.: Олимп: ООО “Фирма «Издательство АСТ»”, 1999. – С. 163.
- Бутырский Г.А. Школьный физический практикум: учебное пособие для студентов, магистрантов, учителей физики и аспирантов / Г.А. Бутырский. – Киров: ООО Издательство «Радуга-ПРЕСС», 2015. − С. 23.
Список литературы на английском языке / References in English
- Yuryevich E.I. Osnovyi robototekhniki [Robotics bases – 2-e edition processed and added]. / E.I. Yuryevich. − SPb.: BKHV-Peterburg, 2005. – 416 p. [in Russian]
- Philippov S.A. Robototekhnika dlya deteiy i roditeleiy [Robotics for children and parents] / S.A. Philippov. – SPb.: Nauka, 2013. – 320 p. [in Russian]
- Karputina A. Yu. Obrazovatelyenaya robototekhnika [Educational robotics] / A. Yu. Karputina // Sovremennyie nauchnyie issledovaniya i innovatsii [Modern scientific researches and innovations] – 2016. - № 12. [Electronic resource]. URL: http://web.snauka.ru/issues/2016/12/74896. (accessed: 06.2017) [in Russian]
- Gaiysina I.R. Razvitie robototekhniki v shkole [Robotics development at school] / I.R. Gaiysina // Pedagogicheskoe masterstvo (II): materialyi mezhdunar. zaoch. nauch. konph. [Pedagogical skill (II): materials of the international correspondence scientific conference] // − M.: Buki-Vedi, 2012. – PP. 105-107. [in Russian]
- Saranin V.A. Eksperementalyenyie issledovatelyeskie zadaniya po fizike. 7 – 11 klassyi [Experimental research tasks on the physicist. 7 - 11 classes] / V/A/ Saranin, Yu. V. Ivanov. – M.: VAKO, 2015. − P. 34. [in Russian]
- Irodov I.E. Zadachi po obtcheiy fizike: Ucheb. Posobie. 2-e isd., pererab. [Problems on the general physics: the Manual. - 2 edition processed] / I.E. Irodov. – M.: Nauka, 1988. – P. 163. [in Russian]
- Fizika: 3800 zadach dlya shkolyenikov i postupayutchih v vuzyi [Physics: 3800 problems for schoolboys and arriving in high schools / Authors-composers N.V. Turchina, L.I.Rudakov, O.I.Surov and others]. – M.: Drofa, 2000. – P. 391. [in Russian]
- Beliovskiiy N.A. Ispolyezovanie LEGO-robotov v injenernyih proektah shkolyenikov. Otraslevoiy podhod [Use of LEGO-robots in engineering projects of schoolboys. The branch approach] / N.A. Beliovskiiy, L.G. Beliovskaya. M.: DMK-Press, 2016. – 88 p. [in Russian]
- Vse resheniya k “Sborniku zadach po obtchemu kursu fiziki” V.S. Volyekenshteiyn. V 2 kn. Kn. 1. [All decisions to «to the Collection of problems at the general course of physics» V.S. Volkenshtejn. In 2 books. The book 1]. – M.: Olimp: OOO “ Firma «Izdatelyestvo AST»”, 1999. – P. 163. [in Russian]
- Butyirskiiy G.A. Shkolyenyiiy fizicheskiiy praktikum: uchebnoe posobie dlya studentov, magistrantov, uchiteleiy fiziki i aspirantov [School physical practical work: the manual for students, undergraduate, teachers of physics and post-graduate students] / G.A. Butyirskiiy. – Kirov: OOO Izdatelyestvo “Raduga-PRESS”, 2015. – P. 23. [in Russian]