МОДЕЛИРОВАНИЕ СПУСКА И ПРИЗЕМЛЕНИЯ КВАНТОМОБИЛЯ
Рисунок 1 - Схема сил, формирующих балансы сил и моментов:
Vq — вектор скорости движения квантомобиля; V∞ — скорость невозмущенного набегающего потока воздуха (|Vq| = |V∞|); Cg — центр тяжести (ЦТ) экипажа; Gq — сила тяжести экипажа; Fa — приведенная сила инерции экипажа; CFT — точка приложения траста КД к корпусу экипажа; FT, FTx и FTz — сила тяги КД (траст) и ее покоординатные компоненты; Cw — центр давления (ЦД) аэродинамических сил; Fw, Fwx и Fwz – сила воздействия воздуха и ее покоординатные компоненты; Ff1 и Ff2 – силы сопротивления качению передних и задних колес, соответственно; Tf1 и Tf2 — моменты сопротивления качению колес; hFwx, hFTx, hg — расстояния векторов соответствующих сил Fwx, FTx, Fa от ОП; lFwz, lFTz — расстояния векторов соответствующих сил Fwz, FTz до вертикали от оси задних колес; l0 – расстояние вектора силы Fwz до вертикали центра колесной базы; Lwb, L1 и L2 – расстояния базовое и от осей колес до проекции центра тяжести на ОП; A и B — центральные точки пятен контакта колес с ОП; Rz1 и Rz2 — нормальные реакции ОП; Lst — расстояние между стабилизирующими трастерами
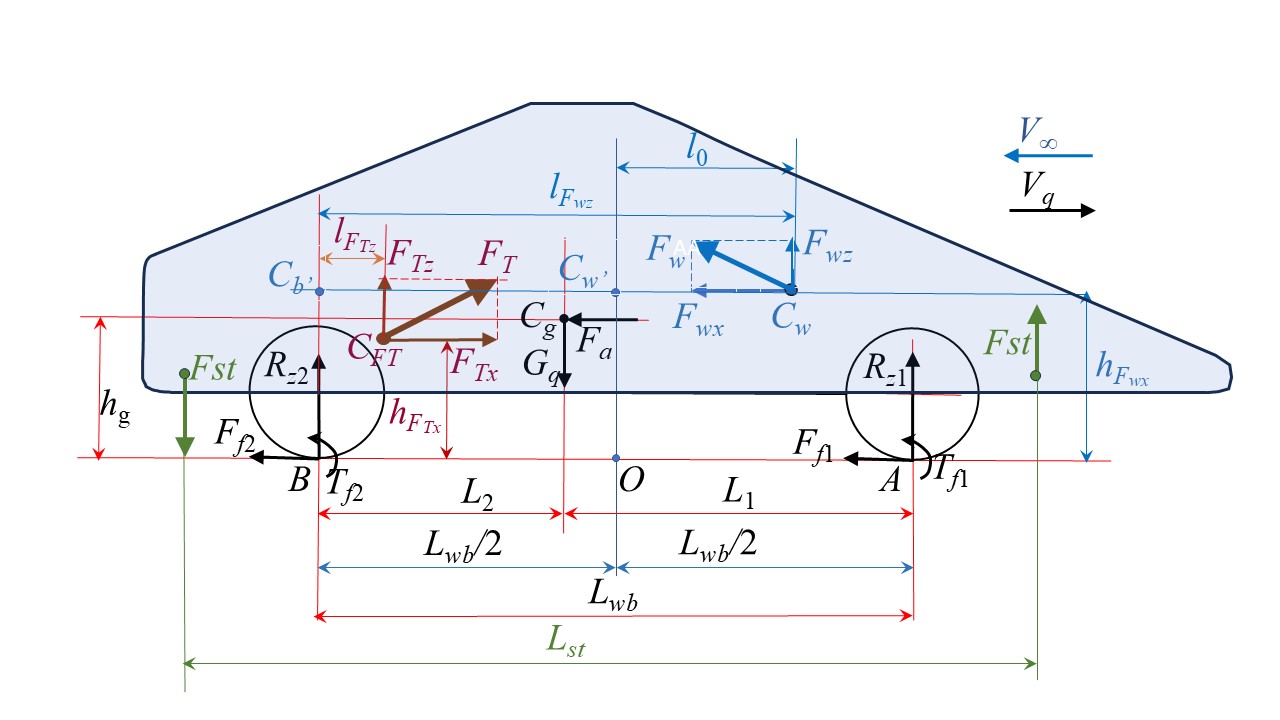
по ист. [19]