GPS UBLOX 6M MODULE PAIRING WITH THE AVR MICROCONTROLLER

Студент; НИ Томский политехнический университет
СОПРЯЖЕНИЕ GPS МОДУЛЯ UBLOX 6M С AVR МИКРОКОНТРОЛЛЕРОМ
Аннотация
В данной работе будет описано сопряжение и настройка GPS модуля Ublox 6m с микроконтроллером AVR ATmega 328. Подобные модули активно применяют в робототехнике для навигации робота в пространстве на открытой местности.
Ключевые слова: микроконтроллер, GPS модуль, протокол NMEA.
Chernykh A.A.
Student; Tomsk Polytechnic University
GPS UBLOX 6M MODULE PAIRING WITH THE AVR MICROCONTROLLER
Abstract
This article describes the pairing and setup process GPS module Ublox 6m with AVR microcontroller ATmega 328. Similar modules are actively used in robotics for robot navigation in open space conditions.
Keywords: microcontroller, GPS module, NMEA protocol.
Введение
Робототехника c каждым днём приобретает всё большую роль в производственной деятельности и жизни человеческого общества. В последние годы роль робототехники всё больше усиливается, а сферы её применения непрерывно расширяются.
Одной из основных задач в робототехнике является позиционирование и навигация робота в пространстве. На открытой местности преимущественно используют GPS навигацию.
Сопряжение GPS модуля с МК
Первоначальным этапом необходимо настроить GPS модуль для передачи координат на микроконтроллер и отделением нужной информации для ее дальнейшего применения в программировании по алгоритму движения робота, так как сам модуль отсылает на МК много разной информации. Был выбран GPS модуль u-blox 6m.
Для передачи GPS координат на микроконтроллер используют NMEA 0183 протокол.
NMEA («National Marine Electronics Association») — полное название «NMEA 0183» — текстовый протокол связи морского (как правило, навигационного) оборудования между собой. Стал особенно популярен в связи с распространением GPS приёмников, использующих этот стандарт.
Одно из самых важных и наиболее используемых NMEA сообщений, которое также будет использоваться в моей работе, с информацией о текущем фиксированном решении – горизонтальные координаты, значение высоты, количество используемых спутников.
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47
GGA – NMEA заголовок, 123519 –UTC время 12:35:19;
4807.038, N – Широта, 48 градусов 7.038 минуты северной широты;
01131.000, Е – Долгота, 11 градусов 31.000 минуты восточной долготы.
Подключение GPS модуля к МК
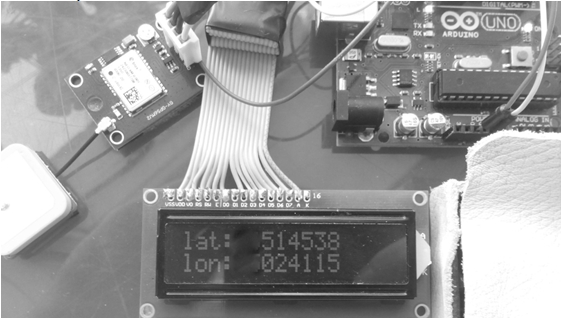
Рис.1 - Вывод координат на LCD
Первоначальным этапом было принять нужную информацию с GPS приемника для последующей реализации алгоритма движения по координатам.
Была собрана схема подключения (рис.2) GPS, LCD к микроконтроллеру и написана программа на языке C++. В качестве демонстрационного варианта были выведены координаты на LCD дисплей (рис.1). Использовался МК ATmega 328, 16 символьный дисплей 8*2 (модель 1602 ZFC), GPS u-blox 6.
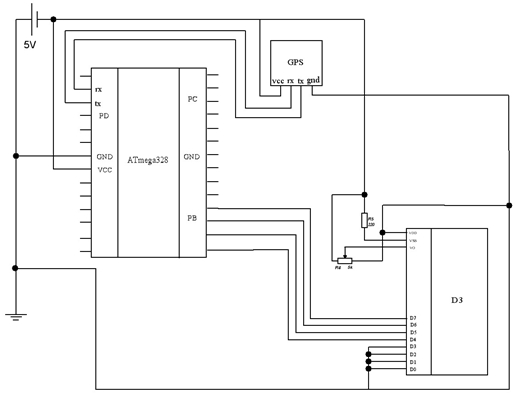
Рис.2 - Электрическая принципиальная схема подключения GPS, LCD
Передача данных на МК
Данные с GPS модуля на микроконтроллер передаются по UART.
Выводы микроконтроллера, используемые модулем UART, являются линиями порта PD. В качестве входа приемника (RXD) используют вывод РD0, а в качестве выхода передатчика (TXD) - вывод PD1.
GPS модуль передает данные на микроконтроллер со скоростью 9600 бод. Поэтому для корректной работы и своевременной передачи данных с GPS на МК необходимо правильно настроить UART на микроконтроллере (инициализировать). Настройки скорости приема учитывают, какой режим передачи используется (обычный или ускоренный), частоту тактирования микроконтроллера, скорость передачи данных с устройства на МК. Отвечает за данную настройку регистр AVR микроконтроллера UBRR. Его значение находится по формуле:
![]() , где Fck – тактовая частота микроконтроллера, BAUD – скорость передачи данных GPS модуля в бодах, 16 – для обычного асинхронного режима (8 – для ускоренного).
, где Fck – тактовая частота микроконтроллера, BAUD – скорость передачи данных GPS модуля в бодах, 16 – для обычного асинхронного режима (8 – для ускоренного).
К МК подключен внешний кварц на 16 МГц.
Рассчитаем значение регистра UBRR.
![]()
Заключение
В ходе данной работы был подключен GPS модуль к микроконтроллеру и настроен на передачу данных по протоколу NMEA 0183. Была собрана электрическая схема с выводом координат на LCD дисплей. Следующим этапом будет тестирование на точность GPS, и далее составление алгоритма и написание программы для навигации робототехнической платформы по GPS.
Литература
- Brian W. Evans. Arduino Programming Notebook.- Publeshed: First Edition August 2007.
- Блог: Arduino [Электронный ресурс]. URL: http://arduino.ru/ Режим доступа: свободный (дата обращения: 14.06.2014).
- Datasheet на GPS модуль Ublox 6m.
- Datasheet на микроконтроллер