THREE-AXIS FLUXGATE MICROPROCESSOR-BASED MAGNETOMETER

Власкин К.И.1, Прищепов С.К.2, Миловзоров Г.В.3
1Младший научный сотрудник, Уфимский государственный авиационный технический университет; 2кандидат технических наук, доцент, Уфимский государственный авиационный технический университет; 3 доктор технических наук, профессор, Удмуртский государственный университет
ТРЕХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МИКРОПРОЦЕССОРНЫЙ МАГНИТОМЕТР
Аннотация
Рассмотрена структура магнитометрического преобразователя с тремя ортогональными феррозондами. Определены особенности работы трехкомпонентного феррозондового датчика в неоднородном магнитном поле. Представлен прибор для обнаружения на фоне нормального поля Земли слабых магнитных аномалий, с возможностью определения их местоположения и параметров в результате обработки данных магнитометрического датчика по алгоритму микропроцессорного вычислителя.
Ключевые слова: трехкомпонентный феррозондовый преобразователь; однородное магнитное поле; магнитная аномалия; ось чувствительности магнитометра.
1Vlaskin K.I., 2Prishepov S.K., 3Milovzorov G.V.
1 Junior research associate, Ufa State Aviation Technical University; 2 PhD in technical sciences, associate professor, Ufa State University; Ufa State Aviation Technical University; 3Doctor of engineering science, professor, Udmurt State University
THREE-AXIS FLUXGATE MICROPROCESSOR-BASED MAGNETOMETER
Abstract
The structure of the magnetometer sensor with three orthogonal fluxgate is considered. The features of the three axial fluxgate sensor in a heterogeneous magnetic field are determined. Also the device for detection of weak magnetic anomalies at Earth’s normal magnetic field is presented. It allows to determine their location and parameters by magnetometric sensor data processing with microprocessor algorithm.
Keywords: three component fluxgate sensor; heterogeneous magnetic field; magnetic anomaly; the axis of magnetometer sensitivity.
Магниточувствительные преобразователи феррозондового типа являются типичными представителями класса «smart sensor», то есть выполняют в измерительных приборах и системах функции интеллектуальных датчиков (ИД) [1]. Информационный сигнал феррозонда (ФЗ) содержит 4 информативных составляющих: амплитуду U2f; фазу; частоту 2f; знак (+), (-) вектора магнитного воздействия. Следовательно, ФЗ как чувствительный элемент (ЧЭ) уже представляет собой многофункциональный преобразователь. Расширение функций ФЗ для решения комплексных задач – алгоритмических и вычислительных – выполняется в мультисенсорных структурах феррозондовых ИД, когда два и более ФЗ образуют единый измерительный модуль, размещённый в общем корпусе.
Многофункциональным является 3-х компонентный ФЗ ИД, в котором оси чувствительности трёх ЧЭ ортогональны. Трёхкомпонентный ФЗ ИД способен выполнять множество функций [2]. В частности, функция вычисления модуля полного вектора  магнитного воздействия нормального поля Земли (НМПЗ), решается по формуле:
магнитного воздействия нормального поля Земли (НМПЗ), решается по формуле:
 (1)
(1)
где  – ортогональные составляющие вектора
– ортогональные составляющие вектора .
Функция выполняется микропроцессорным (МП) вычислителем в архитектуре ИД вне зависимости от ориентации модуля трехкомпонентного ФЗ в пространстве.
Функция вычисления модуля  – аномалии вектора НМПЗ решается трёхкомпонентным ФЗ по формуле:
– аномалии вектора НМПЗ решается трёхкомпонентным ФЗ по формуле:
 (2)
(2)
где  – эквивалент, соответствующий уровню НМПЗ, содержащийся в памяти МП;
– эквивалент, соответствующий уровню НМПЗ, содержащийся в памяти МП;  – текущее значение измеряемого магнитного поля. Вектор
– текущее значение измеряемого магнитного поля. Вектор  раскладывается ортогональной системой осей чувствительности датчика на составляющие
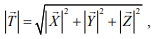
раскладывается ортогональной системой осей чувствительности датчика на составляющие  что деформирует правильную по рис.1 пространственную диаграмму направленности 3-х компонентного ФЗ в однородном магнитном поле
что деформирует правильную по рис.1 пространственную диаграмму направленности 3-х компонентного ФЗ в однородном магнитном поле  .
.
Рис.1. Объемная диаграмма направленности 3-х компонентного ФЗ
Деформация диаграммы направленности датчика затрудняет определение направления вектора , так как требует заданных вспомогательных угловых перемещений магнитометрического модуля ФЗ относительно начала координат О по рис. 1. Задача определения направления вектора магнитной аномалии решается трехкомпонентным ФЗ ИД с введением дополнительной функции переключения в режим измерения осевого чувствительного элемента  по рис.1, без опроса микропроцессорным вычислителем элементов
по рис.1, без опроса микропроцессорным вычислителем элементов  .
.
Данная совокупность функций ФЗ ИД реализована в автономном универсальном магнитометре по рис. 2. Это прибор, предназначенный для контроля магнитный полей малого ≤70 мкТл уровня. Особенностью прибора является возможность обнаружения слабых магнитных аномалий на фоне больших и постоянно действующих магнитных полей, в частности, на фоне НМПЗ. Данная возможность обеспечивается применением 3-х компонентного феррозондового интеллектуального датчика с алгоритмической микропроцессорной обработкой измеренных параметров, а так же работой прибора в 2-х режимах: «Контроль» и «Пеленг».
Прибор предназначен для эксплуатации как в стационарном, так и в переносном полевом вариантах. Каких-либо дополнительных внешних соединений не требуется. Для начала измерений тумблер режимов работы переводится в положение «КОНТРОЛЬ», тумблер «ВКЛ.» - в верхнее положение. При этом начинается подготовка к работе микропроцессора и электронной схемы, которая продолжается 30 сек. По окончании подготовки, что определяется устойчивостью показаний индикатора, капсула датчика приводится оператором в неподвижное состояние. Предпочтительное положение капсулы в режиме «КОНТРОЛЬ» - вертикальное. Измерения необходимо начинать, удерживая капсулу датчика на возможно большем расстоянии от ферромагнитных объектов, то есть в условиях НМПЗ. Данные условия характеризуются неизменными показаниями цифрового индикатора при угловых эволюциях капсулы относительно центра О осей чувствительности ФЗ по рис 1. Следует учитывать, что нормальное магнитное поле Земли, то есть полное отсутствие его аномалий, можно наблюдать только в особых условиях – вне зоны ферросодержащих геологических образований, промышленных сооружений, коммуникаций, полевых воздействий силовых агрегатов. Установившееся в условиях НМПЗ на индикаторе прибора число, принимается за «начало шкалы» для определения наличия и характера магнитной аномалии. Наличие аномалии деформирует правильную пространственную диаграмму направленности 3-х компонентного ФЗ по рис.1., что согласно (2) вызывает отклонение показаний индикатора прибора от числа, принятого за начало шкалы. После обнаружения магнитной аномалии производится уточнение ее параметров, в частности, направление действия.

Рис.2. Внешний вид автономного магнитометрического прибора
Для определения параметров обнаруженной магнитной аномалии, тумблер режима работы переключается в положение «ПЕЛЕНГ». В данном режиме магнитометр выполняет функцию магнитной указки, то есть задает направление поиска источника магнитной аномалии по оси направленности Z-феррозонда 3-компонентного датчика (рис.1). Это направление будет соответствовать продольной Z-оси цилиндрической капсулы по рис.2 в том ее пространственном положении, в котором цифровой индикатор прибора покажет наибольшее отклонение от числа «начало шкалы».
В корпусе прибора размещен автономный аккумуляторный блок питания. Вместе с тем, предусмотрена возможность подключения внешнего источника + 6 В.
Дополнительные функции прибора данного исполнения могут быть реализованы без дополнительных аппаратных затрат - достаточно перепрограммировать процессор в соответствии с новыми требованиями технических заданий, в частности:
- обнаружение проводников и силовых кабелей, как с постоянным током, так и с переменным током 50 Гц;
- геофизические исследования на земной поверхности, в частности, определение Fe-содержания отвалов шахтных и скважинных пород;
- функции датчика пространственного положения либо перемещений подвижных объектов;
- функции счётчика перемещающихся ферромагнитных объектов (автомобили, вагоны поездов, конвейерные изделия и т.д.);
- определение скорости либо числа оборотов вращающихся объектов.
References
Прищепов С.К., Власкин К.И. Интегральные и гибридные технологии производства феррозондовых датчиков // Нано- и микросистемная техника. – 2011. - № 9. – С. 2-4.
Ковшов Г.Н., Коловертнов Г.Ю. Приборы контроля пространственной ориентации скважин при бурении. – Уфа: Изд-во УГНТУ, 2001. – 228с.
References
Прищепов С.К., Власкин К.И. Интегральные и гибридные технологии производства феррозондовых датчиков // Нано- и микросистемная техника. – 2011. - № 9. – С. 2-4.
Ковшов Г.Н., Коловертнов Г.Ю. Приборы контроля пространственной ориентации скважин при бурении. – Уфа: Изд-во УГНТУ, 2001. – 228с.