MAGNETIC INDUCTION EJECTORS FOR MANAGED LAUNCH NANO-SATELLITES

Филонин О.В.1, Талызин Ю.Б.2
1Профессор, доктор технических наук, Самарский государственный
аэрокосмический университет имени академика С.П. Королёва; 2Инженер-конструктор 3 категории, ФГУП ГНП РКЦ «ЦСКБ-Прогресс»
МАГНИТОИНДУКЦИОННЫЕ ЭЖЕКТОРЫ ДЛЯ УПРАВЛЯЕМЫХ ЗАПУСКОВ НАНОСПУТНИКОВ
Аннотация
В статье рассмотрены методы расчёта и построения магнитоиндукционных эжекторов для запуска наноспутников, приведены примеры конструкторских реализаций для спутников массой в 1 кг.
Ключевые слова: магнитоиндукционный эжектор, системы запуска наноспутников
Phylonin O.V.1, Talyzin U.B.2
1Professor, Doctor of Technical Sciences, Samara State Aerospace University named after academician S.P. Korolev
2 Design Engineer, SRP SRC “TsSKB-Progress”
MAGNETIC INDUCTION EJECTORS FOR MANAGED LAUNCH NANO-SATELLITES
Abstract
In the article the methods of calculation and construction of magneto ejectors to launch nano-satellites, are examples of design implementations for the satellites mass of 1 kg.
Keywords: magnetic induction ejector system, startup Nanosatellites
Малые спутники, массами от одного до нескольких десятков килограмм, получивших названия нано - (НС) и микроспутники прочно вошли в различные сферы космических исследований. С их помощью широкий круг исследователей получил возможность проводить анализ отдельный областей атмосферы, исследовать определённые участки земной поверхности, анализировать различные виды космического излучения, а также излучение Земли в разных участках ЭМ спектра и т.д. Как правило, такие спутники доставляются на орбиты в качестве попутного груза, при этом их запуск в настоящее время осуществляется с помощью пружинных систем. Последние, позволяют только отделить запускаемый аппарат (ЗА) от носителя со скоростями в пределах (1÷5) м/с [1].
Рис. 1 а) – эскиз эжектора,
б) – структурная схема блока управления
В то же время для множества задач [2], особенно выполняемых с помощью колоний наноспутников, например исследование верхних слоёв атмосферы методами малоракурсной томографии, необходимо выводить НС на заданные орбиты, через определённые интервалы времени, с заданными скоростями. Такого рода задачи, круг которых непрерывно расширяется, потребовали разработки более совершенных систем запуска [3]. Однако системы такого рода не позволяют осуществлять программируемые запуски НС на заданные траектории, через определённые интервалы времени, с необходимыми начальными скоростями (импульсами).
Авторы, для решения поставленных задач, разработали способ управляемого запуска НС с помощью магнитоиндукционных эжекторов. На рис. 1 а) приведён эскиз такого эжектора. Собственно устройство запуска состоит из двух идентичных сильноточных катушек – 8, помещенных в ферритовые броневые сердечники – 9, назовём их индукторами. Они расположены соосно по отношению друг к другу. Сердечники с катушками запрессованы в тонкостенные корпуса, которые дополнительно, выполняют ещё и роль экранов. Одна из катушек закреплена неподвижно относительно корпуса – 12, другая может перемещаться вдоль их общей оси. Подвижная катушка перемещается в пределах (0÷1, 0÷2) см, относительно неподвижной катушки, соосность обеспечивается направляющим механизмом – 6. В исходном состоянии катушки должны быть достаточно плотно прижаты друг к другу. Это обеспечивается с помощью пружины – 7, которая, в момент запуска играет роль демпфера. Параметры сердечников и катушек выбираются в зависимости от массы запускаемого объекта, его начальной скорости. Для НС с массами порядка 1 кг, катушки, например, содержат по 48 витков медного провода диаметром 1 мм, и помешены в броневые сердечники из феррита (НЦ 2000) имеющих внешний диаметр 35 мм.
Для создания импульсного магнитного поля, которое является в данном случае «рабочим телом» системы, используются конденсаторы 10 000 мкф, с рабочим напряжением 100 В. Каждый такой конденсатор способен запасти до 50 Дж энергии. Если теперь конденсаторы разрядить на катушки, которые необходимо включить встречно, то за счёт импульсов электромагнитных полей, сформированных каждой катушкой, подвижная катушка получит соответствующий механический импульс  . Соответствующий импульс, с учётом механических потерь, приобретёт и запускаемый аппарат, нижняя часть которого – 4 была установлена на стартовом столе с помощью направляющих – 5 эжектора.
. Соответствующий импульс, с учётом механических потерь, приобретёт и запускаемый аппарат, нижняя часть которого – 4 была установлена на стартовом столе с помощью направляющих – 5 эжектора.
Несложные расчёты показывают, что в начальный момент времени, когда индукторы плотно прижаты друг к другу, энергия магнитного поля в этот момент может достигать 3 Дж. Действительно, описываемая система представляет собой два  контура, поэтому, при постоянных значениях параметров
контура, поэтому, при постоянных значениях параметров  , для каждого контура, очевидно можно записать дифференциальное уравнение в виде:
, для каждого контура, очевидно можно записать дифференциальное уравнение в виде:
 (1)
(1)
Так как начальные условия, исходя их физических соображений, для момента времени  , могут быть заданы в виде:
, могут быть заданы в виде: 
Поэтому общее решение уравнения (1), в первом приближении, для временного интервала значительно меньшего величины времени разряда конденсатора  , можно записать в виде:
, можно записать в виде:  (см. рис. 2 а), б)).
(см. рис. 2 а), б)).
Ситуация коренным образом изменяется по мере возникновения и увеличения зазора между индукторами, при этом резко падает их индуктивность, уменьшаются напряженности магнитных компонент поля, ощутимую роль начинают играть эффекты связанные с возбуждаемыми индукционными токами (самоиндукция в каждом контуре) и т.д.
Характер процессов разряда конденсатора и тока в контуре, в этом случае, полученный с помощью методов математического моделирования, показан на рис. 2 в) и г). На рис. 2 д) приведён характер изменения тока в одном контуре за заданное время разряда конденсатора, а на рис. 2 е) показана зависимость изменения энергии в катушке индуктора за время разряда  .
.
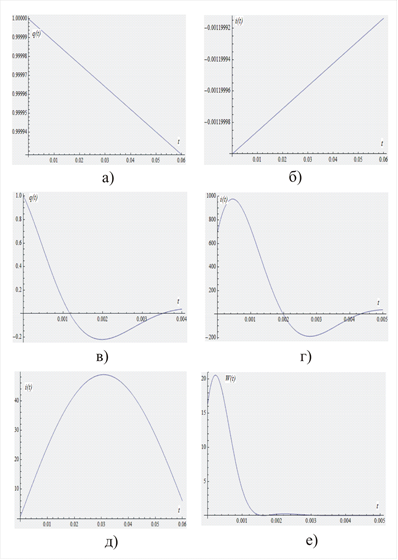
Рис. 2 Иллюстрация процессов в разрядном контуре эжектора
Величину силы, определяющей изменение импульса отделяемого объекта можно найти из условия баланса - изменение энергии системы равно работе сил поля:
 (2)
(2)
здесь  - изменение энергии системы,
- изменение энергии системы,  – приращение расстояния между инжектором и объектом,
– приращение расстояния между инжектором и объектом,  – изменение энергии конденсатора,
– изменение энергии конденсатора,  - изменение энергии магнитного поля катушек.
- изменение энергии магнитного поля катушек.
Изменениями энергии тепловых потерь в данном случае можно пренебречь, как показали расчёты, тепловые потери за время разряда составляют 0,0001 Дж. Энергия магнитного поля двух индуктивно связанных катушек может быть определена в виде:
 (3)
(3)
Индуктивности L1 и L2 не зависят от расстояния  между катушками, это расстояние влияет лишь на величину взаимной индукции M. Следовательно, изменение энергии магнитного поля катушек при изменении расстояния между ними на величинуможно оценить из соотношения:
между катушками, это расстояние влияет лишь на величину взаимной индукции M. Следовательно, изменение энергии магнитного поля катушек при изменении расстояния между ними на величинуможно оценить из соотношения:
 (4)
(4)
Конденсатор, при этом, должен выработать «дополнительную» энергию , обусловленную тем, что необходимо создать дополнительное напряжение для компенсации ЭДС, возникающих в контурах при их перемещении. Это дополнительное напряжение  равно сумме производных по времени потокосцеплений взаимоиндукции обеих катушек:
равно сумме производных по времени потокосцеплений взаимоиндукции обеих катушек:
 . (5)
. (5)
Уравнение энергетического баланса можно записать в виде:
 (6)
(6)
Таким образом, сила, действующая на отделяемый аппарат, в данный момент времени может быть оценена из простого соотношения:
 (8)
(8)
Заметим, что для расчета «электромагнитной силы» необходимо знать зависимость взаимной индуктивности катушек М от расстояния между ними, как правило, такая зависимость находится по сериям экспериментальных измерений. В том случае, если катушки индукторов имеют одинаковое число витков
 , то величину
, то величину  можно оценить с помощью эмпирически получаемого соотношения:
можно оценить с помощью эмпирически получаемого соотношения:  , здесь
, здесь  - эффективный радиус катушки эжектора
- эффективный радиус катушки эжектора  , вид функции
, вид функции  , определяется из экспериментальных данных.
, определяется из экспериментальных данных.
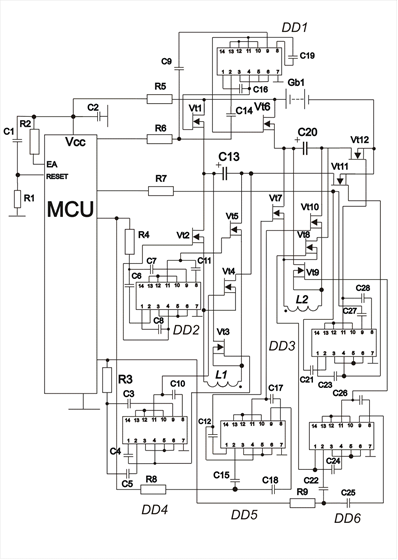
Рис. 3 Принципиальная схема макета системы
управления магнитоиндукционного эжектора
Для запуска НС в заданном направлении, т.е. при определённых значениях углов  , относительно ориентации платформы -1, (её ориентация в пространстве определяется положением системы выведения) служат электромеханические системы, состоящие из двигателей приводов – 3, 18. Система привода – 3, состоящая конического редуктора и собственно двигателя привода обеспечивает необходимое значение угла
, относительно ориентации платформы -1, (её ориентация в пространстве определяется положением системы выведения) служат электромеханические системы, состоящие из двигателей приводов – 3, 18. Система привода – 3, состоящая конического редуктора и собственно двигателя привода обеспечивает необходимое значение угла  , разворачивая систему запуска относительно оси – 16. С помощью конической передачи – 19 и двигателя – 18 система запуска разворачивается оси системы, в соответствие с выбранным значением угла
, разворачивая систему запуска относительно оси – 16. С помощью конической передачи – 19 и двигателя – 18 система запуска разворачивается оси системы, в соответствие с выбранным значением угла  . Электродвигатели приводов управляются с помощью микропроцессорного блока, обобщённая схема которого изображена на рис. 1 б). Данный блок содержит микроконтроллер – 1, с подготовленными заранее данными, контроллер заряда конденсаторов – 2, блок управления сильноточными тиристорами – 3, блок управления полевыми транзисторами - 4, системы управления – 5, 6 электродвигателями – 7, 8. Особенностями данной системы управления процессами разряда конденсаторов являются:
. Электродвигатели приводов управляются с помощью микропроцессорного блока, обобщённая схема которого изображена на рис. 1 б). Данный блок содержит микроконтроллер – 1, с подготовленными заранее данными, контроллер заряда конденсаторов – 2, блок управления сильноточными тиристорами – 3, блок управления полевыми транзисторами - 4, системы управления – 5, 6 электродвигателями – 7, 8. Особенностями данной системы управления процессами разряда конденсаторов являются:
- Тиристоры в данном случае выполняют двойную роль – разрешают процессы разряда конденсаторов и отключают индукторы на время их заряда от внутреннего источника или солнечной панели.
- Регулируя степень открытия полевых транзисторов можно изменять величину энергии накапливаемой в индукторах, что в свою очередь позволяет изменять величину импульса запуска отделяемого аппарата.
- Так как броневые сердечники находятся в замкнутом состоянии очень малое время порядка несколько микросекунд, то транзисторы должны открываться строго синхронно.
Вариант принципиальной схемы макета управления процессами заряда конденсаторов  и их разряда через индукторы
и их разряда через индукторы  показан на рис. 3. Отметим, что в данном варианте схемы управления применены только полевые транзисторы, типа Power MOS IV™, что позволяет упростить конструкцию, повышает её надёжность, увеличивает точность дозирования величины заряда и соответствующих разрядных токов, но несколько повышает её стоимость, по сравнению с тиристорным вариантом (рис. 1 б)). Выбор данного типа транзисторов для коммутации обусловлен тем, что они обеспечивают высокую скорость переключения 11 нс, малое сопротивление канала в открытом состоянии – 0,06 Ом, высокую выходную мощность (250 ÷ 500) ВА. Транзисторы обладают малой входной ёмкостью (40÷500) пкФ, значительной устойчивостью к большим значениям
показан на рис. 3. Отметим, что в данном варианте схемы управления применены только полевые транзисторы, типа Power MOS IV™, что позволяет упростить конструкцию, повышает её надёжность, увеличивает точность дозирования величины заряда и соответствующих разрядных токов, но несколько повышает её стоимость, по сравнению с тиристорным вариантом (рис. 1 б)). Выбор данного типа транзисторов для коммутации обусловлен тем, что они обеспечивают высокую скорость переключения 11 нс, малое сопротивление канала в открытом состоянии – 0,06 Ом, высокую выходную мощность (250 ÷ 500) ВА. Транзисторы обладают малой входной ёмкостью (40÷500) пкФ, значительной устойчивостью к большим значениям  . Это позволяет им обеспечивать надёжную работу систем, при коммутации индуктивной нагрузки. Транзисторный ключ управляется – открывается на заданный интервал времени, с помощью стандартного драйвера верхнего или нижнего плеча типа IR2117 (на приведённой схеме они не показаны). С помощью микросхем полевой серии DD1 ÷ DD6, на которых собраны одновибраторы, формируются нормализованные импульсы для открывания транзисторов (Vt1,…, Vt10), через соответствующие драйверы.
. Это позволяет им обеспечивать надёжную работу систем, при коммутации индуктивной нагрузки. Транзисторный ключ управляется – открывается на заданный интервал времени, с помощью стандартного драйвера верхнего или нижнего плеча типа IR2117 (на приведённой схеме они не показаны). С помощью микросхем полевой серии DD1 ÷ DD6, на которых собраны одновибраторы, формируются нормализованные импульсы для открывания транзисторов (Vt1,…, Vt10), через соответствующие драйверы.
В заключении отметим, что описанная система запуска имеет габариты порядка 1 дм3, массу примерно 1 кг, энергии запасаемой в конденсаторах и преобразованной в индукторах различных типов хватает для сообщения спутнику массой в 1 кг приобретать скорость (1 ÷ 2) м/с.
References
Селиванов А.С., Тучин Ю.М., Урличич Ю.М., Вишняков В.М. Предварительные результаты летных испытаний технологического наноспутника ТНС-0. Доклад на 10-ой межд. конф. «Системный анализ управления и навигации». Крым, Евпатория, 3-10 июня 2005.
М.Ю. Овчинников и др., Наноспутник REFLECTOR. Выбор параметров системы ориентации // Космические исследования, 2007, т.45, N 1, 67–84.
Глущенков В.А. (RU), Юсупов Р.Ю. (RU), Белоконов И.В. (RU), Гимранов З.И. (RU), Способ запуска наноспутников в качестве попутной полезной нагрузки и устройство для его осуществления, патент РФ, 2472679(13) C1.
References
Селиванов А.С., Тучин Ю.М., Урличич Ю.М., Вишняков В.М. Предварительные результаты летных испытаний технологического наноспутника ТНС-0. Доклад на 10-ой межд. конф. «Системный анализ управления и навигации». Крым, Евпатория, 3-10 июня 2005.
М.Ю. Овчинников и др., Наноспутник REFLECTOR. Выбор параметров системы ориентации // Космические исследования, 2007, т.45, N 1, 67–84.
Глущенков В.А. (RU), Юсупов Р.Ю. (RU), Белоконов И.В. (RU), Гимранов З.И. (RU), Способ запуска наноспутников в качестве попутной полезной нагрузки и устройство для его осуществления, патент РФ, 2472679(13) C1.