FINALIZATION SCHEME STEPPER MOTOR CONTROL

Тимченко Ю.Н.
Студент, кафедра внутризаводского электрооборудования и автоматики, ФГБОУ ВПО «Кубанский государственный технологический университет», Армавирский механико-технологический институт
ДОРАБОТКА СХЕМЫ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
Аннотация
В статье рассмотрена – доработка схемы управления шаговым двигателем, разработано упрощение процессов управления, управление с дистанции, привлечение предпринимателей, обеспечение на этой основе экономического развития предприятия.
Ключевые слова: двигатель, микроконтроллер, промышленность.
Timchenko, N.
Student, Department of Electrical and intra-plant automation, VPO "Kuban State Technological University", Armavir Mechanics Institute of Technology
FINALIZATION SCHEME STEPPER MOTOR CONTROL
Abstract
In this article we review stepper motor control circuit, designed to simplify the management, control of the race, attracting entrepreneurs, thereby ensuring the economic development of the enterprise.
Keywords: motor, microcontroller, industry.
Целью данной работы является доработка схемы контроллера шагового двигателя. Схема и программа к PIC-контроллеру были разработаны и представлены на веб-сайте японского радиолюбителя Seiichi Inoue. http://www.piclist.com/images/www/hobby_elec/index.htm. Позже они распространились по сети интернет и в данный момент доступны на многих сайтах.
В России статья под названием «PIC-КОНТРОЛЛЕР УПРАВЛЯЕТ ЭЛЕКТРОДВИГАТЕЛЕМ» впервые появилась в 6 номере журнала «Радио» в 2002 году, где описание к ней уже было переведено на русский язык. Принципиальная схема устройства изображена на рис. 1.
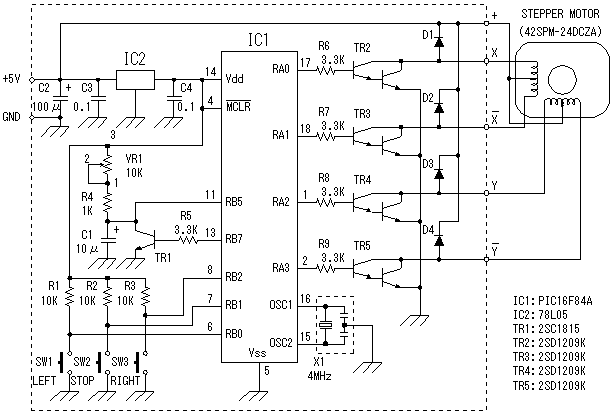
Рис.1 – Принципиальная электрическая схема управления шаговым двигателем
Основной служит МК PIC16F84A. Тактовую частоту (4 МГц) задает кварцевый резонатор X1. На элементах R4, VR1, С1 и транзисторе TR1 собран генератор, частоту которого можно плавно изменять переменным резистором VR1. Напряжение с конденсатора С1 поступает на вход RB5 МК IC1. После того как оно превысит пороговое, на выходе RB7 появляется напряжение высокого уровня. Открывшийся транзистор TR1 разряжает конденсатор, после чего цикл повторяется.

Рис.2 – Принципиальная электрическая схема основной части (переработанная) (смоделированная в программе Proteus 7.7)
В исходную электрическую схему были внесены изменения, улучшившие ее характеристики, а также были составлены три вспомогательные схемы. Одна из них предназначена для индикации режима работы, а две другие для изменения режима работы основной схемы дистанционно.
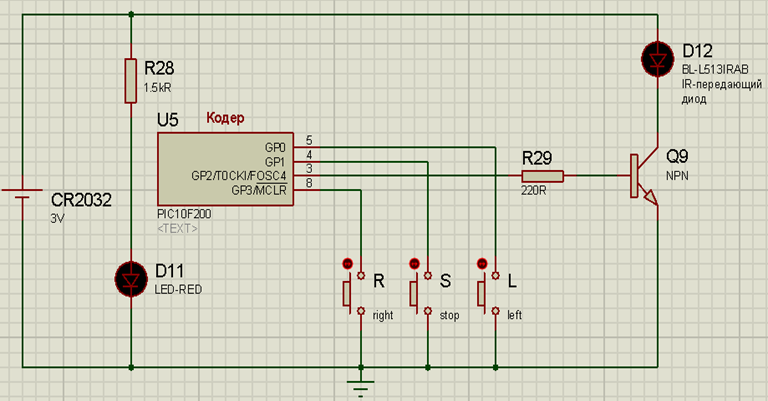
Рис. 3 – Схема передатчика (вспомогательная часть)
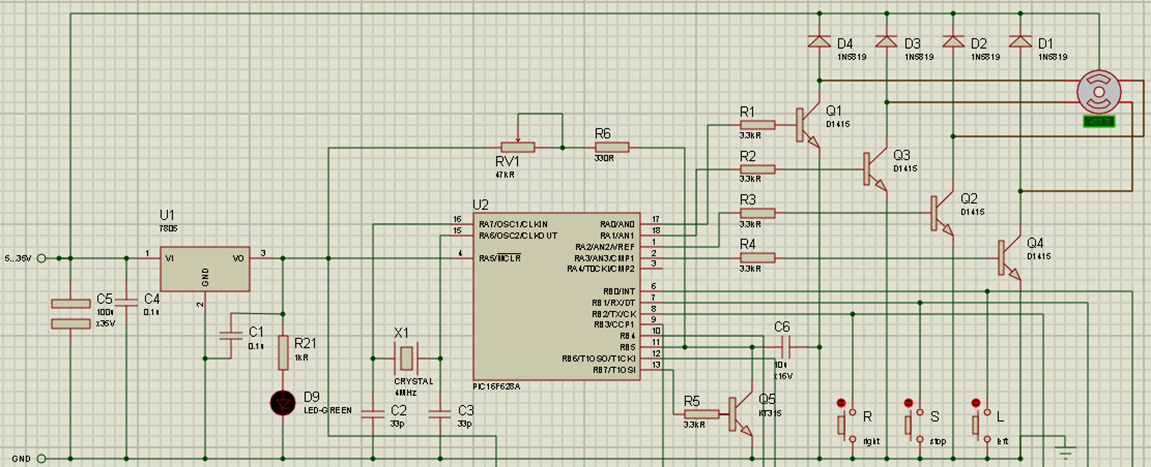
Рис. 4 – Измененная основная схема (смоделированная в программе Proteus 7.7)
Для этого сопротивления R1, R2 и R3 соединены не с «+» питания, а с выходами U3.
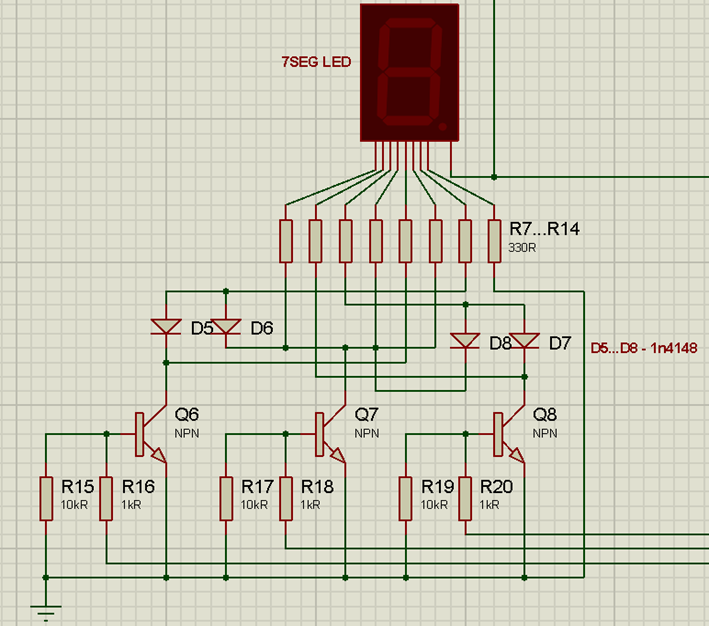
Рис. 5 – Схема индикации (смоделированная в программе Proteus 7.7)
Возможны следующие режимы:
- отсутствие вращения двигателя (режим “stop” – на индикаторе знак S);
- вращение двигателя влево (режим “left” - на индикаторе знак l);
- вращение двигателя вправо (режим “right” - на индикаторе знак r).
Принцип работы данной схемы следующий: главным элементом является семисегментный индикатор с общим анодом и «+» питания подается на общий анод сразу. Катоды сегментов через токоограничивающие сопротивления коммутируются тремя транзисторами Q6…Q8 (рисунок 2) в определенной последовательности, образуя нужные символы. Управляющие сигналы для открытия транзисторов подает микроконтроллер Pic16f628a посредством управляющей программы.
Диоды D5…D8 используются для коммутации сегментов, образующих более одного знака. Так для образования буквы S используется 5 сегментов индикатора, буквы r – два, буквы l – два сегмента.
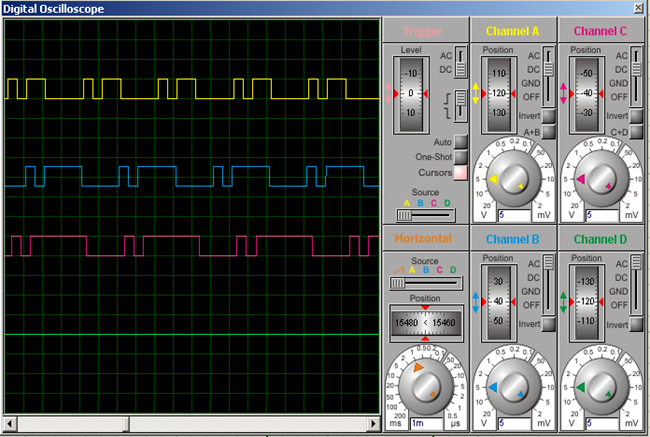
Рис.6 – Осциллограммы команд в программе Proteus 7.7
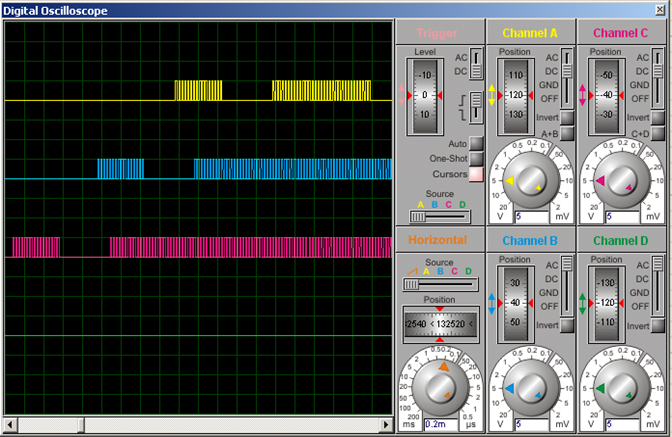
Рис.7 – Осциллограммы кодированных команд в программе Proteus 7.7
Схема на рисунке 3 предназначена для кодирования сигнала о нажатой кнопке и передачи его в виде излучения ИК светодиода. Кодирование происходит по времени. Каждая команда состоит из стартового бита длиной 0,5мс и бита команды (от 1мс до 3мс). На рисунке 6 изображены осциллограммы кодированных команд. Для того чтоб приемник их «увидел», они должны передаваться с частотой 33кГц (т.е. быть разбиты на прямоугольные импульсы соответствующей длины). В соответствии с этим, команды будут выглядеть так, как показано на рисунке 7.
Схема под номером 3 предназначена для приема и декодирования команд от передатчика (рисунок 3). Прием ведется на интегральную схему типа MC3374. Она работает с частотой 33кГц принимаемого ИК сигнала и содержит принимающий диод, фильтр и усилитель (на рисунке 8 U4 является не точным обозначением MC3374 и подразумевается, что R25 находится в ее корпусе).
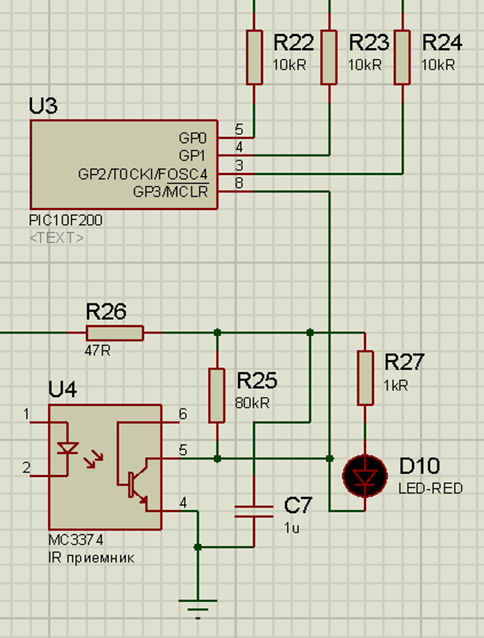
Рис. 8 – Схема приемника и декодера
Входящие сигналы усиливаются и инвертируются (рисунок 9), после чего поступают на микроконтроллер, где идет проверка, какая из команд «пришла». Определение команды происходит по длительности рабочего бита, а распознание очередной команды по стартовому биту.
На выходах микроконтроллера декодера установлена логическая “1”. Если происходит распознание команды, то на одном из трех выходов логическая “1” сменяется логическим “0”.
Текст программы для работы с контроллером Pic16f628a написан на
языке “Assembler” для программной среды MPLab IDE (интегрированная
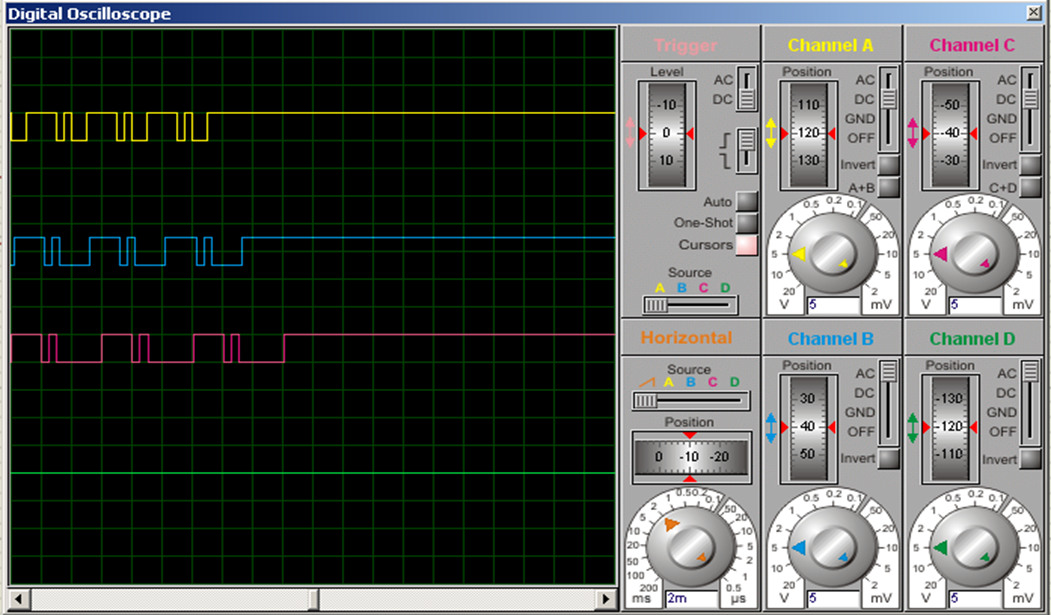
Рис. 9 - Осциллограммы команд на выходе MC3374
среда разработки для микроконтроллеров PIC microchip)..
Монтажные схемы выполнены в программе Sprint-Layout 5.0.
Стоимость элементов, используемых при изготовлении, составляет 468 руб.
References
Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. - М.: Энергоатомиздат, 1987. - 200с.
Микроконтроллеры. Выпуск 2. Однокристальные микроконтроллеры PIC12C5x, PIC12C6x, PIC16x8x, PIC1400, M16C/61/62. Перевод с англ. Б. Я. Прокопенко/Под ред. Б. Я. Прокопенко. - М.: ДОДЕКА. 2000. -336 с.
http://www.piclist.com/images/www/hobby_elec/index.htm
http://www.piclist.com/images/www/hobby_elec/index.htm
http://qrx.narod.ru/avt/el_dv.htm
http://forumcnc.aterix.ru/component/kunena/2-Теория/10-Шаговый-двигатель
http://www.alldatasheet.com/
http://blog.adtl.cz/
References
Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. - М.: Энергоатомиздат, 1987. - 200с.
Микроконтроллеры. Выпуск 2. Однокристальные микроконтроллеры PIC12C5x, PIC12C6x, PIC16x8x, PIC1400, M16C/61/62. Перевод с англ. Б. Я. Прокопенко/Под ред. Б. Я. Прокопенко. - М.: ДОДЕКА. 2000. -336 с.
http://www.piclist.com/images/www/hobby_elec/index.htm
http://www.piclist.com/images/www/hobby_elec/index.htm
http://qrx.narod.ru/avt/el_dv.htm
http://forumcnc.aterix.ru/component/kunena/2-Теория/10-Шаговый-двигатель
http://www.alldatasheet.com/
http://blog.adtl.cz/