SELECTION OF A SCHEME OF AN UNMANNED AERIAL VEHICLE OF AIRCRAFT TYPE WITH VERTICAL TAKE-OFF AND LANDING
SELECTION OF A SCHEME OF AN UNMANNED AERIAL VEHICLE OF AIRCRAFT TYPE WITH VERTICAL TAKE-OFF AND LANDING
Abstract
The use of modern unmanned aerial vehicles is one of the key areas of the global transport system. Their application in remote regions of the world allows for significant automation of logistics, which, in turn, leads to a reduction in operating costs. At the same time, the development of transport logistics plays a significant role in the development of remote regions. The work shows an approach to the selection of an unmanned aerial vehicle scheme that enables an efficient solution of logistic tasks in the conditions of operation at unprepared sites, based on the determination of the minimum relative mass of the propulsion system and fuel for the required take-off weight of the aircraft.
1. Введение
Современная транспортная система представляет собой сложную иерархическую структуру, включающую в себя множество видов транспорта и их взаимосвязи. Она является неотъемлемым элементом современной инфраструктуры и играет важную роль в обеспечении стабильного экономического и социального развития общества
.Во многих регионах мира существует потребность в местных и региональных перевозках на дальность 100…1000 км. Как правило, перевозки на такую дальность характеризуются небольшой транспортной загрузкой, что делает их убыточным для современных перевозчиков, использующих легкие транспортные воздушные суда и транспортные вертолеты.
Наиболее оптимальным авиационным транспортным средством для грузоперевозок на рассматриваемую дальность считаются поршневые самолеты с укороченным взлетом и посадкой, а также транспортные вертолеты. Однако высокая стоимость летного часа, необходимость возведения и содержания в пригодном для эксплуатации состоянии взлетно-посадочных площадок, содержание летных экипажей и авиационно-технического персонала становятся главными причинами, снижающими эффективность данных транспортных средств
.Зачастую наиболее острая потребность в грузоперевозках на рассматриваемую дальность возникает в труднодоступных регионах, что объяснятся невозможностью или сезонностью обслуживания транспортной сети наземным или водным транспортом. В Российской Федерации данный вопрос наиболее актуален в регионах Крайнего Севера, Сибири и Дальнего Востока
.В связи с чем можно сделать вывод, что существует необходимость в разработке транспортных средств, которые удовлетворяют следующим требованиям
:- минимальная стоимость летного часа или километра;
- возможность эксплуатации с минимально подготовленных площадок, находящихся в непосредственной близости с потенциальным заказчиком;
- автономность;
- отсутствие необходимости содержания авиационно-технического персонала для эксплуатации воздушного судна;
- высокая весовая отдача.
Одним из современных авиационных транспортных средств, в наибольшей степени удовлетворяющих вышеперечисленным требованиям является беспилотный летательный аппарат (БПЛА).
Важно отметить, что ключевой тенденцией развития мировой транспортной системы является автоматизация процессов. Внедрение в современные транспортные процессы БПЛА – одно из важнейших средств в достижении целей автоматизации
.В настоящее время активно развивается производство и разработка БПЛА с укороченным взлетом и посадкой. Становится возможным применение различных сочетаний средств создания потребной подъемной силы. По принципу создания тяги для взлета, посадки и горизонтального полета можно классифицировать на
:- «Самолетные» БПЛА (рис. 1, А);
- «Вертолетные» БПЛА (рис. 1, Б);
- конвертопланы и «Комбинированные» схемы (рис. 1, В).
Рисунок 1 - Классификация БПЛА по принципу создания тяги для взлета, посадки и горизонтального полета:
А - «Самолетные» БПЛА; Б - «Вертолетные» БПЛА; В - конвертопланы и «Комбинированные» схемы
Кроме того, данная схема позволяет реализовать беспосадочную схему доставки целевой нагрузки, при этом процесс доставки является автономным. На рис. 2 схематично представлена программа полета БПЛА. Загрузка, заправка и обслуживание БПЛА выполняется в точке А. Точки Б, В, Г – место доставки целевой нагрузки. В точках 3`, 6`, 9` выполняется висение на высоте Hвис = 3…10 м и сброс целевой нагрузки. При полете согласно представленной программе в точке разгрузки не требуется размещение специального оборудования, а также обученного персонала.
На интервалах 1 – 2, 4 – 5, 7 – 8, 10 – 11 выполняется крейсерский полет на высоте Hкрейс ≤ 5000 м. Время полета по маршруту 120…360 мин.
Рисунок 2 - Программа полета БПЛА:
А - точка загрузки, заправки и обслуживания; Б, В, Г - место доставки целевой нагрузки; точки 3`, 6`, 9` - висение и сброс целевой нагрузки; интервалы 1-2, 4-5, 7-8, 10-11 - крейсерский полет на высоте
Таблица 1 - Диапазон ожидаемых ЛТХ проектируемого БПЛА
Параметр | Размерность | Диапазон значений |
Масса коммерческой нагрузки | кг | 30...50 |
Максимальная взлетная масса | кг | 140...200 |
Объем грузового отсека | м3 | 0,4...0,6 |
Объем грузового отсека | км | 200...400 |
Время полета по маршруту | мин | 180...360 |
2. Исходные данные для анализа
В работе рассматриваются следующие схемы БПЛА:
1. Схема А – БПЛА «Комбинированного типа», выполнен по аэродинамической балансировочной схеме «Утка» с двумя продольными балками, жестко закреплёнными на нижней поверхности переднего горизонтального оперения и крыла (рис. 3, А). На продольных балках попарно в осевом направлении размещены 8 электрических двигателей с винтами для ВВП.
2. Схема Б – «Комбинированного» типа, выполнен по аэродинамической балансировочной схеме «Утка» с продольными балками – пилонами для размещения двигателей ВВП (рис. 3, Б). На каждом пилоне размещены 2 двигателя. В конструкции предусмотрен поворотный механизм, обеспечивающий поворот двигателей в продольной плоскости. Применение поворотного механизма обеспечивает возможность использования двигателей ВВП в процессе полета БПЛА по маршруту.
3. Схема В – конвертоплан, выполнен по «Нормальной» аэродинамической схеме. Маршевая силовая установка – поршневые или газотурбинные двигатели, размещены в концевой части крыла (рис. 3, В). В конструкции предусмотрен поворотный механизм, обеспечивающий изменение угла установки двигателей, что в свою очередь обеспечивает потребную тягу для ВВП, а также для полета БПЛА по маршруту.
Рисунок 3 - Схемы БПЛА «Комбинированного» типа:
А-В варианты схемы
- раздельный принцип;
- совместный принцип.
Раздельный принцип – использование двигателей, предназначенных для ВВП, а также отдельной силовой установки, создающей тягу для горизонтального полета.
Совместный принцип – силовая установка, используемая для ВВП, применяется для создания тяги в горизонтальном полете. Реализация такой схемы возможна за счет применения поворотных механизмов, которые обеспечивают установку на необходимый угол всей силовой установки, либо воздушного винта.
В данной работе описан аналитический подход к выбору силовой установки БПЛА «Комбинированного» типа, основывающийся на критерии минимальной относительной массы силовой установки и топлива при заданном диапазоне максимальной взлетной массы.
Цель работы: определение наиболее эффективной схемы БПЛА в рассматриваемом эксплуатационном диапазоне (таблица 1) по критерию минимальной относительной массы силовой установки и топлива.
3. Методика исследования
Связь максимальной взлетной массы БПЛА с требованиями ТЗ (таблица 1) может быть выражена в виде уравнения существования БПЛА самолетного типа:
где mц.н. – масса целевой нагрузки, задается в ТЗ; mк – масса конструкции БПЛА (крыла, фюзеляжа, оперения, шасси, системы управления); mс.у. – масса силовой установки (двигателей и топливных систем); mтопл – масса топлива; mо.у. – масса оборудования управления для обеспечения эксплуатации БПЛА в заданных условиях.
Исходя из уравнения (1) можно сделать вывод, что практически все входящие в него составляющие зависят от m0. Так, чем больше максимальная взлетная масса, тем большая тяга потребуется для обеспечения ВВП, а, следовательно, потребуется либо увеличение количества двигателей ВВП, либо двигатели, имеющие большую тягу, но при этом большую массу конструкции. В связи с чем, в практике проектирования используются относительные массы
.Таким образом, одним из важнейших критериев при выборе схемы размещения и типа силовой установки ВВП для заданной m0 является относительная масса силовой установки (2) и топлива (3):
Для БПЛА с различными схемными решениями и сочетаниями силовой установки для ВВП и горизонтального полета масса силовой установки может быть представлена в виде уравнения:
где – масса двигателей, предназначенных для ВВП;
– масса воздушных винтов СУ, предназначенной для ВВП;
– масса двигателей, предназначенных для горизонтального полета;
– масса воздушных винтов СУ, предназначенной для ВВП.
Аналогично в виде уравнения (5) может быть представлена масса топлива:
где, – масса топлива, затрачиваемая на ВВП;
– масса батарей, потребная для обеспечения энергии электрических двигателей ВВП;
– масса топлива, затрачиваемая на ВВП;
– масса батарей, потребная для обеспечения энергии электрических двигателей ВВП.
Нетрудно заметить, что в уравнениях (4, 5) учтена возможность совместного применения поршневых и электрических двигателей для ВВП и горизонтального полета.
Рекомендуемая тяговооруженность для обеспечения безопасного ВВП имеет диапазон 1,2…1,5
где – ускорение свободного падения (9,81 м/c2);
– суммарная тяга двигателей ВВП.
Таким образом, в данной работе определяются наиболее эффективные тип и количество двигателей ВВП исходя из критерия наименьшей относительной массы силовой установки и
для рассматриваемого диапазона максимальной взлетной массы
и времени полета БПЛА
.
4. Расчет относительной массы силовой установки и топлива для западного диапазона максимальной взлетной массы
Основные технические характеристики, принятые для рассмотрения электрического (для схемы А, Б) и поршневого двигателей для крейсерского полета (схемы А, В), а также турбореактивного двигателя для ВВП и горизонтального полета (схема В) представлены в таблице 2.
Таблица 2 - Характеристики двигателей
где – взлетная тяга одного электродвигателя, используемого для ВВП.
Для схемы с поршневыми и турбореактивными двигателями ВВП (схема В) потребное количество двигателей определим согласно выражению:
или
где – взлетная тяга одного поршневого двигателя на взлетном режиме работы или
– взлетная тяга одного турбореактивного двигателя на взлетном режиме работы.
Потребное количество батарей для питания электродвигателей ВВП (для схемы А) можно выразить через силу тока при работе двигателя на взлетном режиме.
где – потребная емкость батарей для ВВП;
– емкость 1 батареи;
– время, затрачиваемое БПЛА на взлет и посадку;
– коэффициент, учитывающий разрядную характеристику литий-полимерных аккумуляторов
Потребное количество батарей для питания электродвигателей, используемых на всех этапах полета (схема Б), можно выразить в виде следующей зависимости:
где – потребная емкость батарей для полета по маршруту.
Масса топлива, затрачиваемого поршневыми двигателями на крейсерском режиме полета (схемы А, В), и масса топлива, затрачиваемая на ВВП (схема В), может быть определена согласно зависимостям (14, 15).
где – расход топлива на крейсерском режиме полета;
– расход топлива в процессе ВВП;
– плотность топлива;
– время крейсерского полета.
Таким образом, определим массу силовой установки и топлива для рассматриваемых в работе схем.
Для схемы А:
Для схемы Б:
Для схемы В:
или
По результатам определения абсолютной массы силовой установки и топлива для каждой схемы определим относительные массы согласно выражениям (2) и (3).
5. Результаты расчетов
В таблицах 3, 4, 5, 6, 7, 8 приведены результаты расчетов и
при различных значениях максимального времени полета
для схем А, Б, В.
Таблица 3 - Результаты расчетов для рассматриваемого диапазона m0, схема А, t0 = 360 мин., tВВП = 5 мин.
Таблица 4 - Результаты расчетов для рассматриваемого диапазона m0, схема Б, t0 = 40 мин., tВВП = 5 мин.
Таблица 5 - Результаты расчетов для рассматриваемого диапазона m0, схема Б, t0 = 60 мин., tВВП = 5 мин.
Рисунок 4 - График зависимости относительной массы силовой установки и топлива от максимальной взлетной массы, БПЛА схемы А и Б
Таблица 6 - Результаты расчетов для рассматриваемого диапазона m0, схема В с поршневыми двигателями, t0 = 120 мин., tВВП = 5 мин.
Таблица 7 - Результаты расчетов для рассматриваемого диапазона m0, схема В с поршневыми двигателями, t0 = 360 мин., tВВП = 5 мин.
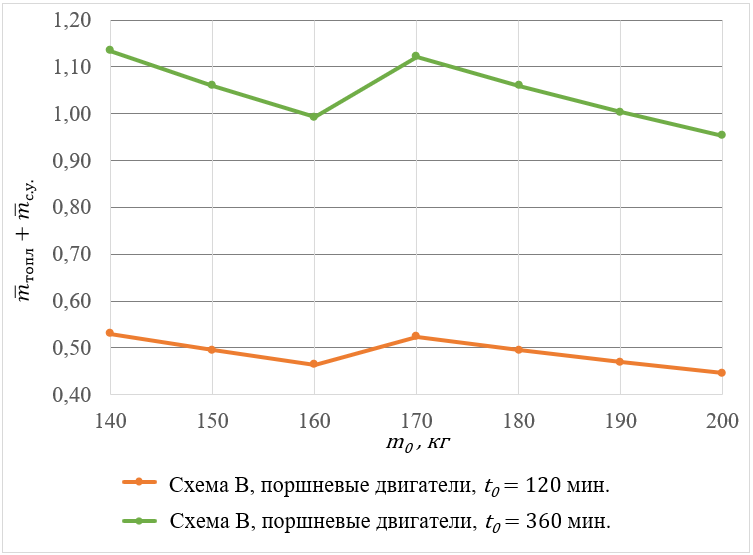
Рисунок 5 - График зависимости относительной массы силовой установки и топлива от максимальной взлетной массы, БПЛА схемы В с поршневыми двигателями
Таблица 8 - Результаты расчетов для рассматриваемого диапазона m0, схема В с турбореактивными двигателями, t0 = 40 мин., tВВП = 5 мин.
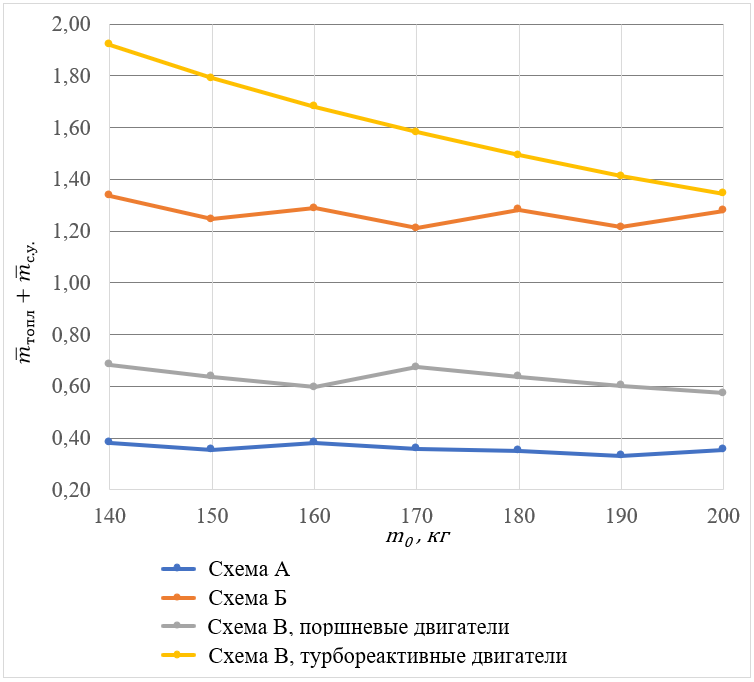
Рисунок 6 - График зависимости относительной массы силовой установки и топлива от максимальной взлетной массы для рассматриваемых схем БПЛА при t0 = 180 мин., диапазон m0 = 140 ÷ 200 кг.
6. Заключение
Таким образом, аналитическим путем определена наиболее эффективная схема БПЛА самолетного типа с вертикальным взлетом и посадкой для рассматриваемого диапазона времени полета и взлетной массы по критерию минимальной относительной массы силовой установки и топлива. Представленная методика может быть использована для определения наиболее эффективной схемы БПЛА самолетного типа с вертикальным взлетом и посадкой на начальных итерациях проектирования путем ее экстраполирования на необходимый диапазон максимальной взлетной массы и времени полета.