ANALYSIS OF THE PREDICTIVE MODEL OF ERROR DETECTION IN THE CONTROL SYSTEM OPERATION OF A COMPLEX TECHNICAL SYSTEM
ANALYSIS OF THE PREDICTIVE MODEL OF ERROR DETECTION IN THE CONTROL SYSTEM OPERATION OF A COMPLEX TECHNICAL SYSTEM
Abstract
The work addresses the issue of using a neural network as part of the methodology for assessing the performance of the aircraft engine control system. For this objective, an algorithm of data diagnostics for error occurrence in a complex technical system (such systems include, for example, aircraft and liquid rocket engines) is proposed, based on which the software implementation of a test neural network model is performed. Based on the generated data of the model control system, the suggested test neural network structure was trained and analysed. The optimal number of hidden layers in the perceptron model for obtaining the best quality metrics of the model and its performance was determined. The results of using the developed MLP-based neural network algorithm for evaluating the performance of the jet engine control system are presented.
1. Введение
Реактивный двигатель летательного аппарата, представляя собой сложную техническую систему, для выполнения своих целевых функций в составе аэрокосмической техники требует высокоэффективного функционирования автоматизированной системы контроля (СК) . Основополагающим принципом её функционирования является, во-первых, сравнение фактических значений параметров, поступающих с датчиков СК, со значениями, вычисляемыми при помощи математической модели, заложенной на этапе разработки в соответствии с выбранной схемой самого устройства, а во-вторых, в использовании показателей взаимной зависимости значений параметров, характеризующих процесс работы реактивного двигателя, которые включены в его систему регулирования.
В ходе изготовления, транспортирования, хранения и при проведении стендовых испытаний характеристики деталей, элементов и узлов двигателей могут отклоняться от исходных закладываемых на этапе проектирования значений, особенно в случае возникновения в ходе испытаний незапланированных явлений, таких как вибрационное горение, потеря механической устойчивости элементов конструкции и др. .
Во время диагностики значения измеряемых параметров могут находиться в пределах допустимых значений и, соответственно, не требовать отбраковки изделия, однако в совокупности их влияние при дальнейшем развитии отклонений потенциально способно привести и к негативным последствиям — выходу значений измеряемых параметров за установленные для них пределы.
Несмотря на рост мощности ЭВМ и развитие численных методов, отразить все многообразие потенциальных изменений в конструкции и степени их влияния на уровне системы контроля в целях повышения её качества и точности регулирования является достаточно трудоёмкой задачей . В этой связи крайне важным фактором для понимания эффективности функционирования СК становится достоверность данных, полученных с датчиков. При непрерывном сборе информации с заранее определенной частотой записи всегда существует отличная от нуля вероятность возникновения единичных сбоев различной природы, часть которых не окажет особого влияния, но другая часть потенциально может привести к появлению критической ошибки в работе СК.
Эти проблемы, с одной стороны, приводят к необходимости модернизации существующих СК путем внедрения в них возможности прогнозирования рисков отказа во время эксплуатации на стадии, когда существует возможность их недопущения, а с другой — необходимости оценивания эффективности функционирования СК для диагностики проблем и определения спектра возможных методов и способов их совершенствования.
В работе приведены результаты рассмотрения возможности применения прогностической модели для оценивания эффективности функционирования модельной СК реактивного двигателя летательного аппарата. Для этого создана и проанализирована тестовая нейросетевая структура, выполняющая решение задачи классификации для определения возникновения ошибки в показаниях датчиков модельной СК.
2. Описание модельной системы контроля
В рамках работы рассматривается часть модельной системы контроля двигателя, учитывающая контроль только во время предпусковой подготовки. К операциям предпусковой подготовки относят события на двигателе, которые протекают уже после первой команды на пуск до момента отрыва летательного аппарата от стартового устройства.
Несмотря на некоторые конструктивные различия, в целом объем предстартовых проверок двигателей разной размерности одинаков. Средства контроля охватывают практически большинство проводимых операций.
Параметры и средства для контроля полета выбираются или создаются на основе требований разработчика реактивного двигателя, с учётом возможностей систем телеметрических измерений.
Измеряемые параметры можно классифицировать по их инерционности, т.е. скорости их изменений в системе: на медленноменяющиеся и быстроменяющиеся. Быстро- и медленноменяющиеся параметры рассматриваются на этапе предпусковой подготовки. Особенность этих данных для дальнейшей обработки заключается в том, что они определяются в статических условиях, где параметры находятся в узком диапазоне, колеблясь около какой-то референсной величины.
Для разработки тестовой модели были выбраны несколько из наиболее значимых в процессе контроля параметров, такие как: давление окислителя и горючего на входе в насос, давление окислителя перед форсунками газогенератора, давление горючего перед форсунками камеры и другие.
Данные параметры являются лишь частью из всех, наиболее значимых в процессе контроля. Параметры были выбраны для того, чтобы показать принцип работы тестовой модели. Для реальных систем значения параметров, а также диапазон допустимых значений зависят от выбранных измерительных средств. Значения параметров в рамках данной работы формировались имитационно и представляли собой случайно сгенерированные числа вида μ ± σ, где μ — выбранное среднее значение показаний датчика, σ ϵ [0; σmax] — случайно сгенерированный шум, значение которого лежит в пределах от 0 до σmax, где σmax — погрешность измерений прибора. В произвольных точках внутри сгенерированной выборки значения заменялись на ошибку показаний, которая представляет собой любое значение за пределами μ ± σmax. Среднее значение показания μ, как и предельное значение сгенерированного шума σmax, выбирались для каждого контролируемого параметра условно на основе справочной литературы
.Тестовая модель формируется таким образом, чтобы она обладала свойством масштабируемости, позволяющем на реальной системе контроля оценивать все контролируемые параметры.
3. Формирование прогностической модели и алгоритм ее работы
Методика оценки показателя эффективности функционирования системы контроля двигателя основана на использовании результатов анализа непрерывно поступающей совокупности данных с датчиков с выбранной частотой сбора, осуществляемого с использованием заранее обученной нейронной сети.
Нейросетевая модель, предварительно инициируется в ходе стендовых испытаний объекта, подлежащего контролю, в режиме реального времени по всему циклу работы с учетом параметров среды (давления и температуры), для снижения вероятности некорректной детекции ошибки.
В режиме работы двигателя сразу после передачи в блок оценки массива первичных данных, состоящего из показаний, собранных со всех датчиков, происходит перекрестный анализ всех значений друг с другом в различных сочетаниях, на основе которого модель вычисляет величину критерия эффективности функционирования системы контроля и сообщает об отклонениях по датчикам, где локализуется проблема, препятствующая достижению оптимума.
Особо важным фактором работы методики является присвоение датчикам строгой иерархии. Это означает, что скачки или единичные случайные сбои, наблюдаемые в показаниях одних датчиков, с точки зрения критичности для функционирования двигателя и системы контроля не так важны, как другие. Основными свойствами, которыми должны обладать наиболее высокостоящие в иерархии датчики, — влияние показаний на принятие решений системой контроля относительно работы элементов и узлов двигателя и отсутствие возможности оценить достоверность показаний по другим датчикам и косвенным признакам. Например, такие показания как давление горючего на входе в насос и давление горючего на входе в форсунки очевидно связаны, поэтому взаимосвязь между ними может быть заранее определена. Тем не менее взаимовлияние значений параметров, измеряемых другими датчиками, требует дополнительного анализа, который в рамках формирования тестовой модели не проводился. В связи с этим, вес каждого рассматриваемого в модели параметра равен 1.
С помощью модели осуществляется прогнозирование возникновения ошибки в системе контроля путем решения задачи классификации, исходя из значений параметров, получаемых с датчиков. Для этого был использован многослойный перцептрон (Multi-layer perceptron — MLP), общая схема работы которого представлена на рисунке 1 , .
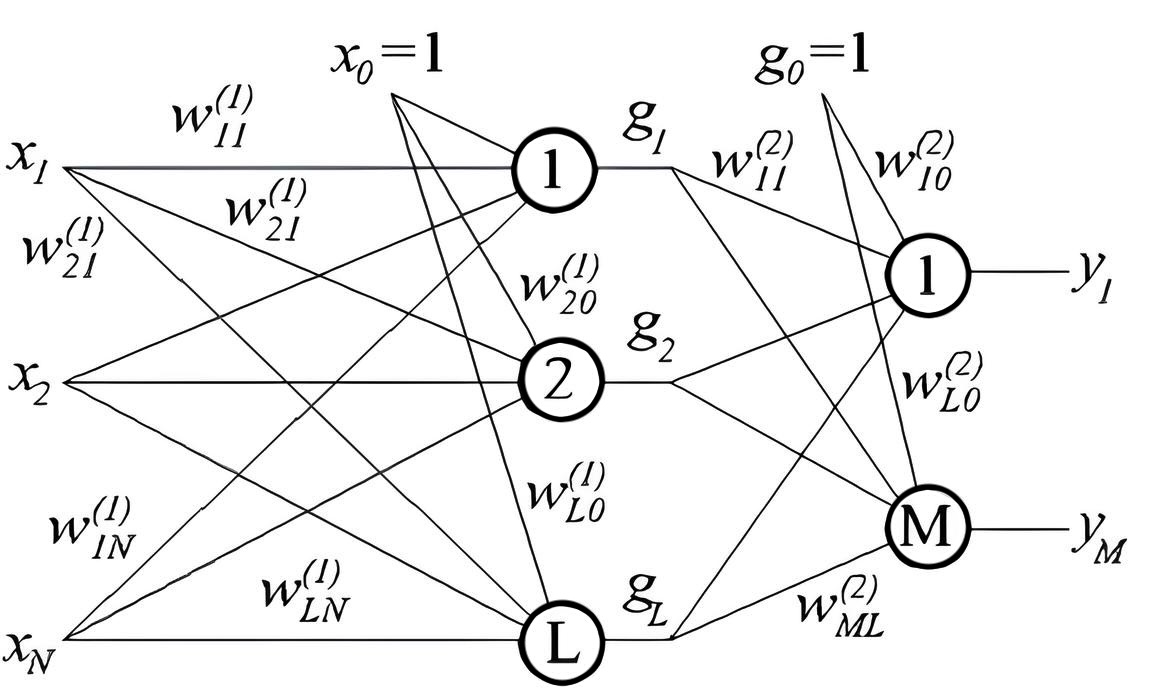
Рисунок 1 - Графическое представление многослойного перцептрона с двумя скрытыми слоями
Примечание: N – количество входных параметров, L – количество нейронов в скрытом слое, M – количество выходных параметров
где b(1) и b(2) — векторы смещения 1-го и 2-го слоя, соответственно, W(1) и W(2) — матрицы весовых коэффициентов, 1-го и 2-го слоя, соответственно, причем W(1) соединяет вектор в пространстве RN˟Nh,
– функция активации softmax , преобразующая вектор чисел в вероятностное распределение,
– функции активации ReLU для введения нелинейности в выходные данные каждого нейрона.
Вектор h(x) вида:
– образует скрытый слой.
На вход подается пакет параметров в форме:
– обучение на которых происходит при помощи метода стохастического градиентного спуска . Значения xi на входном слое представляют собой значения измеряемых контролируемых параметров и yi — бинарный ответ о наличии в приведенных данных ошибки: 0, если ошибка, и 1, если ошибки нет.
Для практической реализации использовалась свободно распространяемая библиотека scikit-learn для разработчиков на языке Python , .
Выбранная нейросетевая модель позволяет изменять размерность как вектора исходных данных, так и вектора выходных (предсказываемых) данных, что обеспечивает возможность масштабирования предлагаемого подхода в дальнейшем для учёта большего количества контролируемых параметров.
4. Анализ прогностической модели
Для проведения исследований на модели был сгенерирован случайный поток данных, с допущением, что частота получения всех показаний была одинакова.
Поскольку данные сгенерированы случайным образом и не содержат (на данный момент) сущностных зависимостей, которые можно определить методами машинного обучения при решении задачи аппроксимации, поэтому данный этап в исследованиях не проводился.
Программная реализации нейросетевой модели на базе MLP для прогнозирования наличия ошибки является решением задачи классификации. Сгенерированные данные были разделены на обучающие и валидационные части в соотношении 3:1. Для определения степени влияния на систему исходные данные подавались напрямую и после нормирования.
Для оценки качества полученной модели использовались следующие характеристики:
1) средняя точность для заданных тестовых данных и меток;
2) расчётное количество итераций обучения (поколений модели) перед достижением требуемой точности;
3) точность прогнозирования, оцениваемая по количеству совпадений между заранее известными значениями работы в валидационной части выборки и результатом работы классификатора;
4) количество скрытых слоёв нейросети (задается перед началом выполнения обучения).
Поскольку количество скрытых слоёв определяется перед началом обучения, было решено провести исследование с целью определения их оптимального количества по выбранным метрикам. Количество слоёв выбиралось исходя из количества параметров: от 5 (половина от количества выбранных параметров) до 1000 (100 количеств параметров). Результаты анализа представлены на рисунке 2.

Рисунок 2 - Результаты анализа обучения
Примечание: количество поколений нейросети (а), качество полученной модели (б) в %, время обучения (в) в секундах и точность прогнозирования (г) в % в зависимости от количества слоев нейросети
Исследование показало, что нормирование данных не влияет на рассмотренные метрики, т.е. тестовая модель не зависит от вида представляемых для обучения данных в рамках данной тестовой задачи.
Анализ нейросетевой модели и выбор для неё оптимальных параметров работы крайне важен при оценивании эффективности функционирования СК. Неоптимальность модели, особенно в части точности и качества, будет влиять на способность модели достоверно обнаруживать ошибки в СК, а следовательно, и на коэффициент достоверности, использующийся при оценивании эффективности системы контроля.
5. Заключение
В статье представлены результаты исследований, в том числе результаты использования разработанного алгоритма работы нейронной сети на базе MLP, для оценивания эффективности функционирования системы контроля реактивного двигателя. Этот подход обеспечивает возможность масштабирования системы для большего количества показаний.
Программная реализация предлагаемой схемы на языке Python показала возможность её использования для анализа поведения модели при неизменных исходных данных с различным количеством скрытых слоев.
Установлено, что оптимальное количество скрытых слоев для рассмотренного набора данных должно в пять раз превышать количество исследуемых параметров СК. При таких значениях обучение модели происходит за 6 секунд, а на 5 поколении достигаются максимальные качество модели и точность её прогнозирования.