THREE-COMPONENT MODULATED APPARENT ACCELERATION SENSOR UNDER VARIABLE BASE ACCELERATIONS
THREE-COMPONENT MODULATED APPARENT ACCELERATION SENSOR UNDER VARIABLE BASE ACCELERATIONS
Abstract
To date, good results have been achieved in the development of various AA sensors that have found widespread application not only in the aerospace industry, but far beyond it in most technical fields. However, the ever-increasing needs of science, technology and economics indicate that in most cases existing implementations of the main known types of sensors still have a number of disadvantages, which include their not always satisfactory mass-dimensional characteristics, poor noise immunity when operating on a moving base, high cost, significant measurement time, relative narrowness of amplitude and frequency ranges, and insufficient reliability and stability.
That is why the problem of creation of a relatively inexpensive vector (three-component) small-size AA sensor of medium accuracy, made on the basis of an assembly of three traditional MS of small accuracy, possessing improved accuracy characteristics in comparison with those of the latter and protection against the influence of temperature, noise, vibration, etc. disturbing influences is relevant.
This work studies the possibility of creating a modulation sensor (MS) of apparent acceleration (AA) of increased accuracy based on a conventional pendulum accelerometer (PA) of low accuracy. Based on the results of calculations and modelling, the structural scheme of a three-component redundant modulation sensor (TRMS) based on three MSs is demonstrated.
1. Введение
К настоящему времени достигнуты высокие результаты в разработке различных датчиков КУ , , , , нашедших широкое применение не только в аэрокосмической отрасли, но далеко за ее пределами в большинстве технических областей. Однако всевозрастающие потребности науки, техники и экономики указывают на то, что в большинстве случаев существующие реализации основных известных типов датчиков по-прежнему сохраняют целый ряд недостатков, к числу которых относятся их не всегда удовлетворительные массогабаритные характеристики, слабая помехозащищенность при работе на подвижном основании, дороговизна, значительное время измерения, относительная узость амплитудного и частотного диапазонов, не всегда достаточная надежность и стабильность.
Поэтому актуальной является проблема создания относительно недорогого векторного (трехкомпонентного) малогабаритного датчика КУ средней точности, выполненного на базе сборки из трех традиционных МА небольшой точности, обладающего улучшенными по сравнению с ними точностными характеристиками и защищенностью по отношению влияния температурных, шумовых, вибрационных и др. возмущающих воздействий.
Для достижения поставленной цели в настоящей работе рассмотрена базовая схема реализации МД , , , на основе традиционного МА, выпускаемого промышленностью. Создание ТИМД, построенного на базе трех МД, предназначенного для работы на подвижном основании, сравнительно малогабаритного, недорогого, помехозащищенного, со средним уровнем точности, с достаточно широким амплитудным и частотным диапазонами, с высоким быстродействием позволит использовать его для решения многих задач аэрокосмической и других отраслей , , .
2. Основные результаты
2.2. Принципиальная схема МД
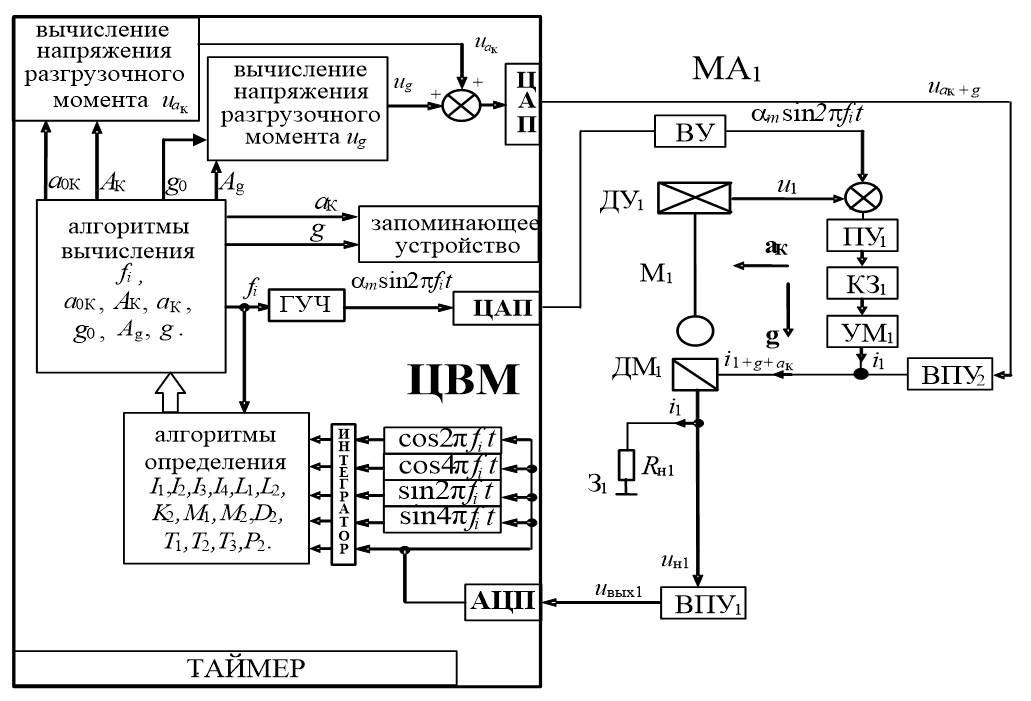
Рисунок 1 - Упрощенная принципиальная схема МД на базе МА1 . Где нижними индексами обозначена принадлежности величин ДУ1ДМ1...соответствующим МАk трехкомпонентного датчика
Примечание: k = 1, 2, 3. Зk З1 – развязанные между собой соединения с “землей” МАk; Мk – маятники; ДУk – датчики угла; ПУk – предварительные усилители; КЗk – корректирующие звенья; УМk – усилители мощности; ДМk – датчики момента; Rнk – нагрузочные сопротивления; ВПУk – выходные прецизионные усилители; ГУЧ – генератор управляемой частоты; ВУ – входной усилитель; ik – токи ДМk
Блок-схема ТИМД представлена на рис. 2. Для измерения каждой из трех проекций КУ aX, aY и aZ целесообразно иметь три измеряющих МА, расположенных на УП так, что их оси чувствительности соответственно образовывали бы ортогональные трехгранники. Введем систему координат связанную с УП OXYZ, тогда КУ УП состоит из трех составляющих по осям OX, OY и OZ. При этом по каждой из осей трехгранника будет направлено по одной оси чувствительности. Для уменьшения влияния угловых движений основания на точность МА следует располагать МА на УП как можно более компактно, а для создания симметрии измерительных каналов – располагать оси чувствительности МА по осям прямоугольного тетраэдра. При работе на подвижном основании происходит непрерывное изменение проекций КУ
. Представим на некотором ограниченном промежутке времени измеряемые МА1 проекции ускоренияАналогично для МА2, МА3:
где x0 = a01= g03 , y0 = a02= g01 и z0 = a03= g02 – их постоянные составляющие, а АX = Aa1= Ag3, АY = Aa2= Ag1 и АZ = Aa3= Ag2 – скорости их изменения (см. рис. 2).
С учетом (1) имеем систему уравнений для МА1 , , :
С учетом (2) имеем систему уравнений для МА2:
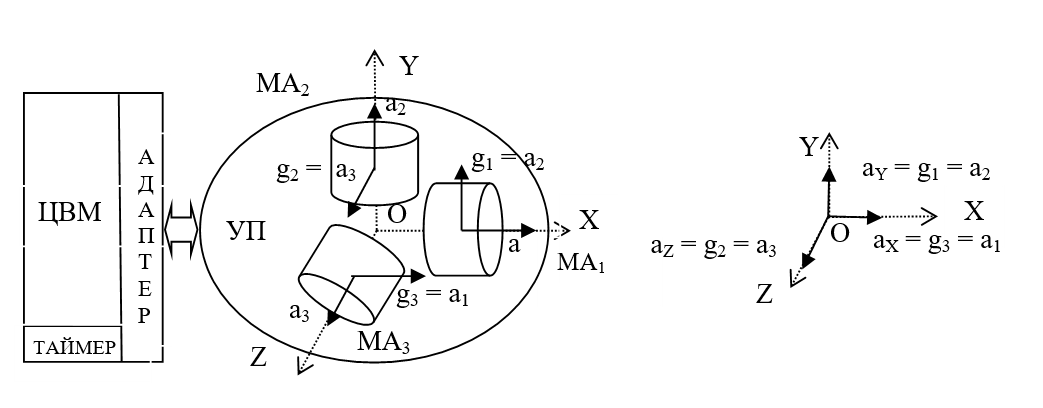
Рисунок 2 - Блок-схема ТИМД
Здесь – жесткость подвеса М,
– индекс, обозначающий принадлежность соответствующего коэффициента к МА1, МА2, МА3.
Для уменьшения динамической погрешности МД, работа МА которого описана (4), необходимо вводить разгрузочные моменты для компенсации вредных составляющих вида , посредством токов ВПУ2:
, формируемых на основании результатов предыдущих шагов работы МД. При этом сигнал
может быть восстановлен как, используя непосредственные измерения с датчика угла ДУ1, так и вычислен на базе выходного сигнала МА с учетом его параметров. Для первого уравнения системы (5) разгрузочные моменты имеют в виду:
а для первого уравнения системы (6) разгрузочные моменты имеют в виду:
Тогда первое уравнение системы (4), (5) и (6) можно представить в виде:
Следует отметить, что наличие дополнительных токов разгрузки не изменит решение системы уравнений (4), (5) и (6) так как на каждом новом шаге соотношение (7), (8) и (9) можно воспринимать в виде:
С учетом (10) уравнения для МА1 можно переписать так:
С учетом (11) уравнения для МА2 можно переписать так:
С учетом (12) уравнения для МА3 можно переписать так:
Здесь – нескомпенсированная составляющая
На каждом шаге программы вычисления значений ускорений поставим в виде (см. рис. 2):
Общее решение (13) во втором приближении относительно и
на втором и последующих шагах будет иметь вид :
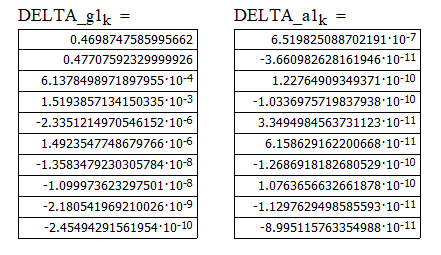
Рисунок 3 - Абсолютная погрешность вычисления g1 и а1 при а1(t) = 7+8t м/c2, g1(t) = 9,8+10t м/c2
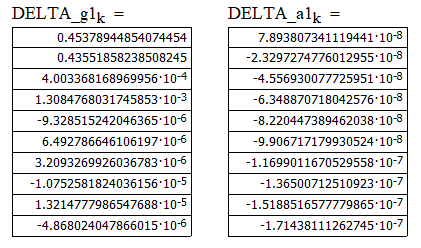
Рисунок 4 - Абсолютная погрешность вычисления g1 и а1 при а1(t) = 1 + 0,01sin0,08t м/c2, g1(t) = 9,8 + 0,013sin0,09t м/c2
3. Заключение
На подвижном основании (на борту судов и самолетов) измерения КУ сопровождается значительными помехами, обусловленными собственной линейной и угловой подвижностью основания и его наклонами, волнением моря, течениями, ветровой нагрузкой, вибрациями носителя и т. д., кроме того, как правило, начальные и заключительные опорные наблюдения разделены большим промежутком времени и расстояния, измерения проводятся в большом диапазоне изменения КУ. Все это требует от приборов повышенной помехозащищенности, расширенного диапазона измерений, высокой стабильности нуль-пункта и масштабного коэффициента, а также точности их эталонирования
. Точность измерения КУ при этом, как правило, составляет 0,1-1 мГал для судов , , и 1-10 мГал для самолетов , , .По сравнению с указанными приборами в результате выполненного имитационного моделирования работы ТИМД на подвижном основании с номинальными значениями параметров
, , установлено, что в идеализированном случае присутствия исключительно методических динамической и температурных погрешностей – удается идентифицировать и скомпенсировать их с очень высокой степенью точности. Уточнены математические модели, разработан и проанализирован модифицированный алгоритм работы ТИМД для работы на двигающемся с переменным ускорением основании. Оценены его погрешности показано, что одним из направлений решения задачи создания малогабаритного ТИМД, предназначенного для работы на подвижном основании, сравнительно недорогого, помехозащищенного, с уровнем точности порядка 1 мгал, с высоким быстродействием (время измерения порядка 0,1 с) является построение ТИМД на базе прецизионных маятниковых акселерометров. ТИМД с такими характеристиками может найти применение для решения задач навигации, геодезии, геологии и др...В результате проведенных работ были предложены общая конструктивная схема, базовые алгоритмы работы и упрощенная математическая модель датчика, проведен имитационное моделирование в условиях переменного основания с использованием МА с металлическим чувствительным элементом, разработанным в 1980-х годах. Получены предварительные результаты, показавшие потенциальную возможность построения ТИМД средней точности. При этом не рассмотренными остались как теоретические, так и практические вопросы, связанные с возможностью реализации ТИМД на базе современных высокоточных МА, как правило, конструктивно включающих блоки аналоговой интегральной электроники и обладающих чувствительными элементами, выполненными с использованием высокостабильных конструкционных материалов – кварца, кремния и др., включая вопросы исследования специфики и инструментальных факторов построения ТИМД, анализа метрологических возможностей, ограничивающих область применения ТИМД при решении гравиметрических задач.
Итак, целью статья является разработка способа построения и алгоритмов работы ТИМД с погрешностью измерения не более единиц мГал, для работы в условиях движений основания.