USING OF WIRELESS TECHNOLOGIES FOR HYBRID SYSTEM OF GEOLOCATION CREATING

А.А. Гущин
Магистрант, Новосибирский Государственный Университет
ИСПОЛЬЗОВАНИЕ БЕСПРОВОДНЫХ СЕТЕЙ ПРИ ПОСТРОЕНИИ ГИБРИДНОГО СЕРВИСА ГЕОЛОКАЦИИ
Аннотация
В данной статье рассматривается вопрос определения географических координат на мобильных устройствах и предлагается решение в виде создания гибридной системы геолокации. Данная система основана на использовании технологий беспроводной связи для определения приблизительной позиции объекта, используя уже известные координаты других пользователей. Этот метод позволяет определять координаты мобильных телефонов, не оснащенных чипом GPS. На практике гибридная система геолокации может быть использована разработчиками информационных, развлекательных или социальных сервисов для смартфонов.
Ключевые слова: Геолокация, беспроводные сети, GPS, Bluetooth
Gushchin A.A.
Master student, Novosibirsk State University
USING OF WIRELESS TECHNOLOGIES FOR HYBRID SYSTEM OF GEOLOCATION CREATING. Abstract
This article examines the issue of determining the geographical coordinates on mobile devices and offers a solution in the form of a hybrid system of geolocation. The system is based on the use of wireless technologies to determine the approximate position of the object using the known coordinates of other users. This method allows to receive the coordinates of the mobile phone that is not equipped with a chip GPS. In practice, the hybrid system of geolocation can be used by developers of informational, entertainment or social services for smartphones.
Keywords: Geolocation, wireless networks, GPS, Bluetooth
В настоящее время все больше российских и зарубежных разработчиков мобильных приложений для смартфонов предлагают сервисы, основанные на технологии геолокации (Location Based Services (LBS). Данные приложения представляют собой информационные, развлекательные или социальные системы, использующие географическую позицию мобильного устройства. Позиция определяется в большинстве случаев через GPS или A-GPS [1,1]. При создании этих приложений приходит осознание проблемы: не все мобильные телефоны оснащены чипом GPS или любым другим чипом, позволяющим с достаточной для обеспечения функциональности точностью определять местоположение аппарата. А значит, для части пользователей телефонов приложение становится недоступным.
Одним из возможных решений данной проблемы при построении такого рода сервиса является использование либо вышек операторов сотовой связи, либо точек доступа Wi-Fi. Это решение уже успешно внедрено в таких системах, как Google Maps и Яндекс.Карты. Теоретически возможно применение еще одного механизма - технологии Bluetooth - для определения текущих координат устройства.
Разработка массового сервиса, изначально предполагающего наличие большого числа пользователей с разными моделями мобильных устройств, наталкивает на идею комплексно подойти к вопросам определения географических координат и построить гибридную систему геолокации. Суть предложения состоит в использовании упомянутых выше технологий беспроводной связи для определения приблизительной (с определенной точностью) позиции объекта, используя уже известные координаты других пользователей Сервиса.
В общем случае, каждому мобильному телефону доступны хотя бы 2 элемента из данного списка:
- GSM/3G/4G
- Wi-Fi
- Bluetooth
- GPS/ГЛОНАСС
Каждая из технологий беспроводной передачи данных имеет свой радиус действия, и сила сигнала ослабевает внутри данного радиуса по мере удаления от источника сигнала. Современные мобильные устройства обладают механизмами для определения силы принимаемого сигнала RSS (received-signal strength).
Величина RSS измеряется в дБм и определяется как
В случае определения расстояния по силе принимающего сигнала возможны две модели расчётов:
- Fingerprint – основывается на эксперементально полученном шаблоне зависимости силы сигнала от расстояния.
- Аналитическое определение расстояния, моделирующее распространение сигнала с помощью сопоставления значения RSSI (Received-Signal Strength Indication) с расстоянием от объекта до приемника.
Во втором случае, наиболее широко распространенной является модель затухания:

где
 - значение RSSI на расстоянии r,
- значение RSSI на расстоянии r,  - значение RSSI на заданном расстоянии r0, d - коэффициент затухания сигнала (приблизительно равен 2), а ε - добавка, обусловленная внешними факторами и имеющая, соответственно, случайный характер. Как правило, ε предполагается нормально распределенной величиной [2,3]
- значение RSSI на заданном расстоянии r0, d - коэффициент затухания сигнала (приблизительно равен 2), а ε - добавка, обусловленная внешними факторами и имеющая, соответственно, случайный характер. Как правило, ε предполагается нормально распределенной величиной [2,3]
Согласно исследованию «Bluetooth Indoor Localization System» (Gunter FISCHER, Burkhart DIETRICH, Frank WINKLER)[3], использование технологии Bluetooth позволяет измерять расстояние с точностью до одного метра. В свою очередь в своем исследовании «Accurate Extraction of Face-to-Face Proximity Using Smartphones and Bluetooth » (Shu Liu, Aaron Striegel)[4], авторы экспериментально показывают, что теоритически расчитаная дистанция не слишком отличается от практически полученных результатов, что соответственно может быть предусмотрено в системе.
Рассмотрим предлагаемое решение на следующем примере:
- Имеются объекты A, B, C, X и Y, использующие сервис, основанный на геолокации.
- Объекты A, B и C поддерживают технологии Bluetooth и GPS.
- Объект X поддерживает технологию Bluetooth.
- Объект Y поддерживает технологии Bluetooth и Wi-Fi.
- Все объекты поддерживают технологию GSM/3G/4G.
Изначально A, B, C регистрируются в Сервисе. Активируя технологии Bluetooth и GPS объекты сообщают Сервису свои текущие координаты и идентификаторы Bluetooth (также модель объекта для определения максимальной мощности излучаемого сигнала).
Далее объект X регистрируется в сервисе, активирует Bluetooth и сообщает сервису идентификатор Bluetooth. Также X сообщает Сервису идентификтор вышки оператора сотовой связи, к которой привязан, и силу сигнала.
На следующем этапе этот же объект сканирует окружение на наличие других Bluetooth устройств и сообщает Сервису идентификаторы всех найденных устройств с указанием силы получаемого сигнала.
На следующем этапе Сервис выбирает из списка переданных идентификаторов те, которые зарегистрированы в системе. Предположим, что в данном случае аппараты A, B и C попали в радиус действия Bluetooth адаптора объекта X.
Сервис сопоставляет идентификаторы из полученного списка с GPS координатами соответствующих объектов. Затем вокруг данных объектов Сервис проводит окружность (для упрощения пример переведен на плоскость, в реальности проводится сфера) с радиусом максимального действия технологии Bluetooth (100 метров). Далее для каждого объекта, в зависимости от силы сигнала, из образованного окружностью круга выбирается кольцо предполагаемого местонахождения объекта X. В идеале в данном случае необходимо было бы использовать окружность, а не кольцо, но принимая во внимание помехи сигнала, необходимо взять припуск в обе стороны.
Область, находящаяся на пересечении данных колец и будет являться позицией объекта X. Для получения апроксимированной координаты в данном случае необходимо взять точку, находящуюся в центре полученной области, т.е равноудалённую от границ области.
Также уточнение полученной координаты может быть выполнено применением данного алгоритма к вышке мобильного оператора (используя идентификатор вышки и её координаты, которые известны в большинстве случаев через публичные сервисы, такие как Skyhook). Таким образом, мы получаем еще одно кольцо, которое пересекает предыдущие кольца.
Со своей стороны, объект Y сообщает Сервису такую же информацию как и объект X, но кроме нее также список Wi-Fi вышек и устройств в округе и их силу сигнала. В данном случае, для этого объекта Сервис строит дополнительные кольца вокруг публичных и частных Wi-Fi точек доступа (получение координат также возможно через публичные сервисы, например Skyhook), вокруг устройств, использующих сервис и использующих Wi-Fi.
Надо отметить, что устройство X уже обладает координатой, апроксимированной Сервисом, и вокруг него также проводится кольцо (в данном случае более широкое, т.к. координата центра изначально не точна).
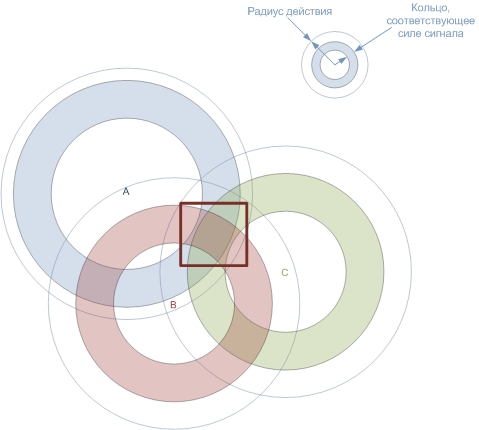
Рис. 1. - Определение координат объекта через построение колец действия беспроводной связи вокруг объектов с уже известными координатами основываясь на силе получаемого сигнала, источник: авторский
Ниже представлена сравнительная характеристика технологий Bluetooth, Wi-Fi и GPS с точки зрения точности получаемых значений для определения геолокации и затраты, связанные с данным определением.[4,1]
Таблица 1 - Сравнительная характеристика технологий Bluetooth, Wi-Fi и GPS, источник : авторская
|
|
Bluetooth |
Wi-Fi |
GPS |
|
Цена оборудования |
Средняя |
Высокая |
Высокая |
|
Покрытие |
Высокое |
Высокое (внутри) |
Высокое (снаружи) |
|
Энергопотребление |
Среднее |
Высокое |
Высокое |
|
Точность |
1-4м |
3-30м |
5-50м |
В заключении хотелось бы отметить следующие моменты:
- Решение об использовании данного решения должно приниматься исходя из важности получаемой точности для Сервиса.
- Данное решение может иметь место только в случае если вокруг объекта всегда есть другие объекты, использующие сервис (либо Wi-Fi точки).
- Городские постройки создают достаточно сильные помехи для беспроводных технологий, что уменьшает точность получаемого результата. Несмотря на это, многие исследователи сходятся во мнении, что погрешности получаемых результатов являются предсказуемыми и могут быть изначально скорректированы в модели вычислений.[5,6]
- Большое число объектов с «точными» координатами, находящиеся вокруг искомого объекта X, значительно повышают точность получаемого результата.
Литература
- Fred Zahradnik, Location-based Service, About.com Guide
- A.K.M. Mahtab Hossain, Hien Nguyen Van, Yunye Jin, Wee-Seng Soh, Indoor Localization Using Multiple Wireless Technologies, National University of Singapore, Singapore
- Gunter FISCHER, Burkhart DIETRICH, and Frank WINKLER, Bluetooth Indoor Localization System, Innovations for High Performance Microelectronics, Germany, 2004
- Shu Liu, Aaron Striegel, Accurate Extraction of Face-to-Face Proximity Using Smartphones and Bluetooth, University of Notre Dame, Notre Dame, IN
- Soh, Wee-Seng S., A Comprehensive Study of Bluetooth Signal Parameters for Localization, Personal, Indoor and Mobile Radio Communications, 2007
References
Fred Zahradnik, Location-based Service, About.com Guide
A.K.M. Mahtab Hossain, Hien Nguyen Van, Yunye Jin, Wee-Seng Soh, Indoor Localization Using Multiple Wireless Technologies, National University of Singapore, Singapore
Gunter FISCHER, Burkhart DIETRICH, and Frank WINKLER, Bluetooth Indoor Localization System, Innovations for High Performance Microelectronics, Germany, 2004
Shu Liu, Aaron Striegel, Accurate Extraction of Face-to-Face Proximity Using Smartphones and Bluetooth, University of Notre Dame, Notre Dame, IN
Soh, Wee-Seng S., A Comprehensive Study of Bluetooth Signal Parameters for Localization, Personal, Indoor and Mobile Radio Communications, 2007
References
Fred Zahradnik, Location-based Service, About.com Guide
A.K.M. Mahtab Hossain, Hien Nguyen Van, Yunye Jin, Wee-Seng Soh, Indoor Localization Using Multiple Wireless Technologies, National University of Singapore, Singapore
Gunter FISCHER, Burkhart DIETRICH, and Frank WINKLER, Bluetooth Indoor Localization System, Innovations for High Performance Microelectronics, Germany, 2004
Shu Liu, Aaron Striegel, Accurate Extraction of Face-to-Face Proximity Using Smartphones and Bluetooth, University of Notre Dame, Notre Dame, IN
Soh, Wee-Seng S., A Comprehensive Study of Bluetooth Signal Parameters for Localization, Personal, Indoor and Mobile Radio Communications, 2007