DIFFERENTIAL ALGEBRAIC EQUATIONS OF CONTROL SYSTEM DYNAMICS

Шемелова О.В.
кандидат физико-математических наук, доцент кафедры математики
Нижнекамский химико-технологический институт (филиал) ФГБОУ ВПО «Казанский национальный исследовательский технологический университет»
Дифференциальные алгебраические уравнения динамики управляемых систем
Аннотация
В работе рассматривается задача построения уравнений динамики управляемых систем различной физической природы с голономными и неголономными связями. В работе уравнения динамики составляются в форме уравнений Лагранжа.
Ключевые слова: дифференциальные алгебраические уравнения.
Keywords: differential algebraic equations.
Физическая система, дифференциальные уравнения, динамика.
Задача управления динамикой систем различной физической природы может описываться уравнениями Лагранжа второго рода:

Здесь  – обобщенные координаты,
– обобщенные координаты,  – функция Лагранжа,
– функция Лагранжа,  – кинетическая коэнергия,
– кинетическая коэнергия,  – потенциальная энергия,
– потенциальная энергия,  – диссипативная функция,
– диссипативная функция,  – уравнения голономных связей,
– уравнения голономных связей,  – уравнения неголономных связей,
– уравнения неголономных связей,  – соответствующие векторы множителей
– соответствующие векторы множителей  Лагранжа,
Лагранжа,  – вектор обобщенных сил. Неопределенные множители
– вектор обобщенных сил. Неопределенные множители  и
и  подбираются таким образом, чтобы уравнения связей, наложенных на обобщенные координаты и скорости системы, составляли её первые интегралы.
подбираются таким образом, чтобы уравнения связей, наложенных на обобщенные координаты и скорости системы, составляли её первые интегралы.
Уравнение Лагранжа второго рода преобразовывается к виду, разрешаемому относительно старших производных. Представление системы уравнений связей и уравнений Лагранжа второго рода в виде системы обыкновенных дифференциальных уравнений (ОДУ) первого порядка с известными частными интегралами позволяет использовать стандартные численные методы для решения уравнений движения [1]. В работе рассматривается задача построения уравнений динамики систем различной физической природы с голономными связями и неголономными связями.
Среди разнообразных явлений различной физической природы нередко можно встретить похожие явления, обнаруживающие одинаковые признаки и закономерности. В таких случаях говорят о физических аналогиях, или аналогичных системах. Физические аналогии, существующие между электрическими, механическими, акустическими и другими системами, давно с успехом используются при исследованиях и расчетах. Методы, основанные на применении аналогий, в ряде случаев
оказываются весьма плодотворными при решении задач. Они позволяют сводить решения некоторых задач к решениям других (уже известных) задач (зачастую из другого раздела физики).
В работах [2, 3, 4, 5] предлагается обобщение и унификация множества переменных, которые описывают динамику физической системы. Некоторую классификацию возможно также провести среди величин, характеризующих динамическое поведение систем различной физической природы.
В [2, 5] определяется унифицированное множество переменных, которое включает следующие известные величины: усилие, расход импульс и перемещение. Данное унифицированное множество может быть использовано для получения уравнений динамики механической системы. В [1, 2, 4] показано, что использование динамических аналогий позволяет строить уравнения динамики для систем различной физической природы.
Соответствующие физические величины можно представить унифицированным множеством в виде таблицы 1.
Таблица 1.
Унифицированные множества переменных для физических систем
|
Система |
Усилие e |
Расход f |
Перемещение q |
Импульс р |
|
Механическая поступательная |
Сила F |
Скорость v |
Положение х |
Количество движения p |
|
Механическая вращательная |
Вращающий момент t |
Угловая скорость w |
Угол q |
Момент количества движения Н |
|
Электрическая |
Электродвижущая сила е |
Сила тока i |
Заряд q |
Магнитный поток l |
|
Акустическая |
Давление Р |
Скорость течения материала Q |
Объем g |
Давление импульса рр |
Данная таблица позволяет сопоставить величины, аналогичные в каждой из четырех систем. Они указывают на динамическую аналогию, существующую между этими четырьмя системами.
Исследование всех систем различной физической природы может быть разделено на две части: на составление дифференциального уравнения, исходя из постановки задачи и физических законов, и на решение дифференциального уравнения.
Для построения уравнений динамики рассматриваются величины, которые характеризуют динамическое поведение систем различной физической природы. А так как уравнения динамики системы могут быть составлены в форме уравнений Лагранжа или в форме уравнений Гамильтона, среди динамических величин проводится некоторая классификация [5].
Уравнения динамики физической системы в форме Лагранжа получаются из общего уравнения динамики свободной системы [2, 6] в силу независимости обобщенных координат 

где  – координаты перемещений,
– координаты перемещений,  – координаты расходов, – кинетическая коэнергия системы любой физической природы [5], – потенциальная энергия, – диссипативная функция, – обобщенные силы.
– координаты расходов, – кинетическая коэнергия системы любой физической природы [5], – потенциальная энергия, – диссипативная функция, – обобщенные силы.
Уравнение (1) соответствует системе  обыкновенных дифференциальных уравнений второго порядка с
обыкновенных дифференциальных уравнений второго порядка с  неизвестными . Основным условием вывода ОДУ Лагранжа (1) является независимость обобщенных координат системы. Допустим, что на координаты перемещения и расходы наложены ограничения, удовлетворяющие
неизвестными . Основным условием вывода ОДУ Лагранжа (1) является независимость обобщенных координат системы. Допустим, что на координаты перемещения и расходы наложены ограничения, удовлетворяющие  голономным и
голономным и  неголономным связям:
неголономным связям:

а также

Для стабилизации связей (2), (3) вводятся уравнения программных связей [1]

Правые части  равенств (5), (6) определяются как решения дифференциальных уравнений
равенств (5), (6) определяются как решения дифференциальных уравнений

Уравнения (7) должны быть рассмотрены совместно с уравнениями динамики и начальными условиями

Равенства (5), (6) составляют уравнения программных связей. Уравнения (7) являются уравнениями возмущений связей [1]. Уравнения программных связей (5), (6), как и уравнения обычных связей, накладывают ограничения на обобщенные координаты перемещения и координаты расхода точек системы.
Тогда ОДУ Лагранжа, с учетом уравнений (5), (6), приводятся к виду

Движение, описываемое уравнением (8), должно удовлетворять также уравнениям программных связей (5) – (6). Таким образом, кинематические уравнения связей (5) – (6) добавляются к уравнениям движения (8) для получения векторов неизвестных множителей  и
и  .
.
Система (5), (6), (8) представляет собой систему дифференциальных уравнений динамики Лагранжа, которая содержит в себе неявных относительно  ОДУ второго порядка,
ОДУ второго порядка,  уравнений связей ( голономных и неголономных связей).
уравнений связей ( голономных и неголономных связей).
Продифференцировав по времени слагаемое  , уравнение (8) можно представить в виде, допускающем решение относительно старших производных:
, уравнение (8) можно представить в виде, допускающем решение относительно старших производных:

где 
Это уравнение вместе с алгебраическими уравнениями связей (5), (6) составляет ДАУ в форме Лагранжа. А, вводя вектор координат расхода  , множество ДАУ Лагранжа из ОДУ второго порядка преобразовывается к системе ОДУ первого порядка. Итак, система ДАУ имеет вид:
, множество ДАУ Лагранжа из ОДУ второго порядка преобразовывается к системе ОДУ первого порядка. Итак, система ДАУ имеет вид:
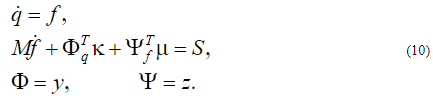
Выполнение соответствующих преобразований для уравнений (10), которое включает исключение множителей и , а также построение уравнений возмущений связей для учета стабилизации связей, позволяет получить следующую систему  уравнений первого порядка:
уравнений первого порядка:
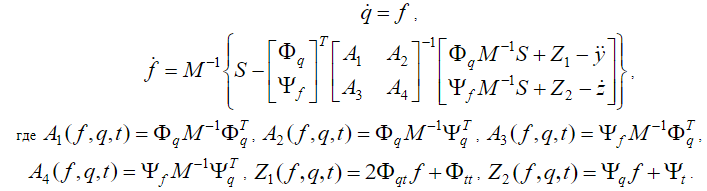
Представление системы уравнений связей и уравнений Лагранжа второго рода в виде системы ОДУ первого порядка с известными частными интегралами позволяет использовать стандартные численные методы для решения уравнений динамики.
References
Мухарлямов Р.Г. Стабилизация движений механических систем на заданных многообразиях фазового пространства // ПММ. –2006. –Т. 70. –No 2. –С. 236–249.
Layton, Richard A. Principles of analytical system dynamics. –Springer-Verlag New-York, Inc. –1998. –156 p.
Ольсон Г. Динамические аналогии. Пер. с англ. Б.Л. Коробочкина. Под ред. М.А. Айзермана. –М.: Гос. изд. иностр. лит-ры, 1947.
Коган И.Ш., 2004, “Физические аналогии” – не аналогии, а закон природы. – http://www.sciteclibrary.ru/rus/catalog/pages/7438.html.
Шемелова О.В. Кинематические и динамические характеристики систем различной физической природы // Материалы II (XXXIV) Международной научно-практической конференции / Кемеровский госуниверситет. –Кемерово: ООО «ИНТ», 2007. –Вып. 8. –Т. 2 –С. 166–168.
Шемелова О.В. Управление динамикой электромеханических систем // Вестник Российского университета дружбы народов, сер. Прикладная математика и информатика, No 1, 2003, С. 63–71.
References
Мухарлямов Р.Г. Стабилизация движений механических систем на заданных многообразиях фазового пространства // ПММ. –2006. –Т. 70. –No 2. –С. 236–249.
Layton, Richard A. Principles of analytical system dynamics. –Springer-Verlag New-York, Inc. –1998. –156 p.
Ольсон Г. Динамические аналогии. Пер. с англ. Б.Л. Коробочкина. Под ред. М.А. Айзермана. –М.: Гос. изд. иностр. лит-ры, 1947.
Коган И.Ш., 2004, “Физические аналогии” – не аналогии, а закон природы. – http://www.sciteclibrary.ru/rus/catalog/pages/7438.html.
Шемелова О.В. Кинематические и динамические характеристики систем различной физической природы // Материалы II (XXXIV) Международной научно-практической конференции / Кемеровский госуниверситет. –Кемерово: ООО «ИНТ», 2007. –Вып. 8. –Т. 2 –С. 166–168.
Шемелова О.В. Управление динамикой электромеханических систем // Вестник Российского университета дружбы народов, сер. Прикладная математика и информатика, No 1, 2003, С. 63–71.