DEVELOPMENT OF DC-MOTOR CONTROL MODULE, BASED ON H-BRIDGE SCHEME

Черных А.А.
Студент, НИ Томский политехнический университет
РАЗРАБОТКА СИЛОВОГО МОДУЛЯ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА НА ОСНОВЕ СХЕМЫ H-МОСТ
Аннотация
В данной работе будет описан расчет и сборка усилителя на основе биполярных транзисторов. Подбор элементной базы, которая соответствовала нагрузке, и обеспечивалась стабильная работа. Тестирование данного силового модуля под управлением МК Atmega16.
Ключевые слова: транзистор, эмиттер, база, коллектор, оптопара, гальваническая развязка, двигатель, микроконтроллер.
Chernykh A.A.
Student, Tomsk Polytechnic University
DEVELOPMENT OF DC-MOTOR CONTROL MODULE, BASED ON H-BRIDGE SCHEME
Abstract
This article describes the calculation and assembly of the amplifier based on bipolar transistors. Selection of new elements, which correspond to the load, and ensures stable operation. Testing of the power module running controlled by Atmega16 microcontroller.
Keywords: emitter, base, collector, opto-galvanic isolation, motor, microcontroller.
Введение
Усилитель является одним из основных узлов различной аппаратуры в устройствах автоматики, телемеханики, вычислительной и информационно-измерительной техники. Электронный усилитель - это устройство, преобразующее маломощный электрический сигнал на входе в сигнал большой мощности на выходе с минимальными искажениями формы. Усиление мощности сигнала осуществляется за счет потребления усилителем энергии от источника питания.
Выбор структуры усилителя
Так как требуемый коэффициент усиления достигает нескольких сотен, то целесообразно составлять усилитель из нескольких простейших усилителей. Такие простейшие усилители называются усилительными каскадами.
Принцип работы и расчет силового модуля
Как правило, управление двигателем постоянного тока осуществляется изменением напряжения, подаваемого на концы обмотки якоря. Для реверсирования двигателя необходимо менять полярность этого напряжения. Для этого используется мостовая схема: Н-мост (драйверы двигателей), состоящая из четырех силовых ключей (в некоторых случаях 2х управляющих дополнительно) и управляющих элементов. Управляющий сигнал, подаваемый на силовую часть схемы, генерируется с помощью микроконтроллера. Для изменения напряжения (аналогового сигнала) используется широтно-импульсная модуляция (ШИМ). Микроконтроллер генерирует ШИМ–сигнал с определенным коэффициентом заполнения (см. рис. 1).
Коэффициент заполнения определяет среднее значение напряжения, которое может составлять от 0 до 5В на выводе микроконтроллера, что соответствует 0..7,2В, подаваемым на обмотку якоря двигателя, а также необходимый ток, так как микроконтроллер подает очень маленький ток. На графике показаны сигналы с коэффициентом заполнения 0,25 и 4.
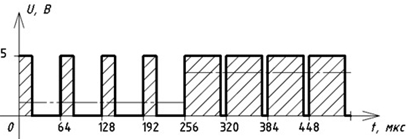
Рис. 1 – ШИМ-сигнал
Пунктирная линия соответствует средним значениям напряжения – 1В и 4В соответственно. Коэффициент заполнения устанавливается с помощью установки значения регистра в AVR микроконтроллере ATmega16 – OCR1AL (для 8-битного ШИМ, который используется для управления двигателем). Это позволяет установить 256 различных скоростей вращения электродвигателя. Значению OCR1AL = 0 соответствует среднее напряжение на выводе OC1A 0В, значению OCR1AL = 255 соответствует напряжение 5В. Частота ШИМ–сигнала составляет 4 000 000 / 256 = 15 625 Гц.
Силовая часть мостовой схемы приведена на рисунке 2. Она состоит из четырех силовых транзисторов, двух управляющих транзисторов, резисторов, ограничивающих базовые токи, шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание Н-моста происходит от блока питания, подающего постоянное напряжение +7,2В относительно земли.
Рассчитываем параметры для маломощного ДПТ, потребляемого ток до 1А и напряжением 7,2В.
![]()
Максимальный коллекторный ток на силовых транзисторах (при пуске двигателя) составляет 2 А. Чтобы обеспечить переход транзисторов в режим насыщения, базовый ток должен быть не меньше:
![]()
С учетом падения на переходах база-эмиттер напряжения 0,7В и разности потенциалов между коллектором и эмиттером управляющих транзисторов 1В, максимальные сопротивления в базовых цепях составят:

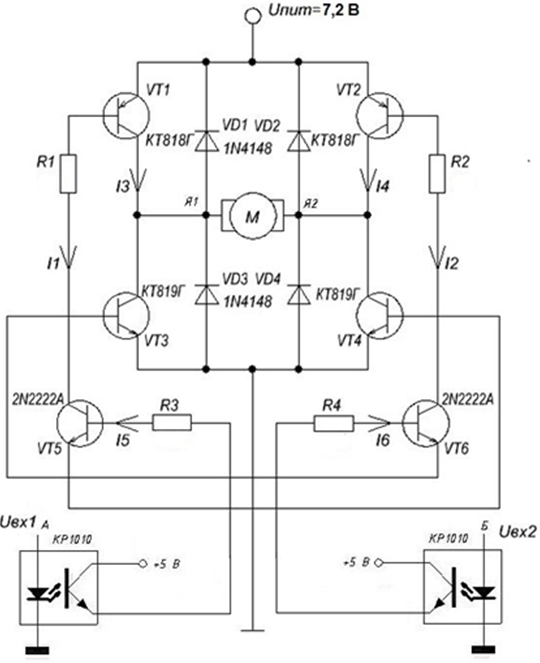
Рис. 2 – Электрическая принципиальная схема силового модуля
Были выбраны сопротивления R1= R2 = 70 Ом. Таким образом, базовый ток составил:

Следовательно, максимально возможное сопротивление:
![]()
Для схемы берем сопротивления номиналом 1кОм.
Мощность, рассеивающаяся на сопротивлениях, составит:
![]()
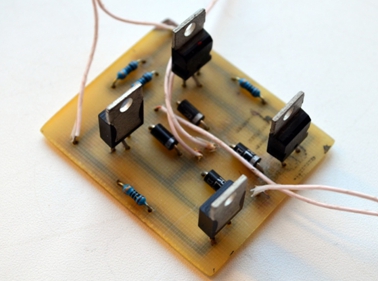
Рис. 3 – Силовой модуль для ДПТ на биполярных транзисторах
Заключение
Был спаян упрощенный вариант схемы на четырех транзисторах без гальванической развязки (Рис.3) и протестирован на МК. Также подобраны транзисторы с запасом мощности согласно схеме, как показано на рисунке 2, для широкой применяемости модуля.
Литература
- Datasheet на микроконтроллер ATmega16.
- Биполярный транзистор, расчёт транзисторного каскада [Электронный ресурс]. URL: http://www.meanders.ru/tranzistors.shtml Режим доступа: свободный (дата обращения: 07.01.2015)
- ALL Transistor datasheet [Электронный ресурс]. URL: http://alltransistors.com/ Режим доступа: свободный (дата обращения: 09.01.2015)
References
- Datasheet na mikrokontroller ATmega16.
- Bipoljarnyj tranzistor, raschjot tranzistornogo kaskada [Jelektronnyj resurs]. URL: http://www.meanders.ru/tranzistors.shtml Rezhim dostupa: svobodnyj (data obrashhenija: 07.01.2015)
- ALL Transistor datasheet [Jelektronnyj resurs]. URL: http://alltransistors.com/ Rezhim dostupa: svobodnyj (data obrashhenija: 09.01.2015)