Rus
Eng
Journals
Submit manuscript
Sign in / Sign up
About journal
Archive
Contacts
Advanced search
Return to article
Идентификация n-звенных робототехнических манипуляторов
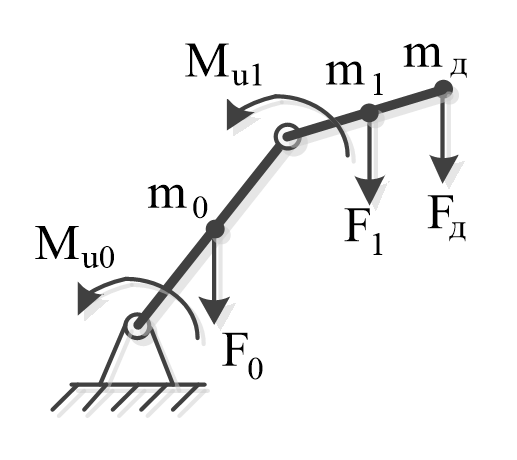
Рисунок 1 - Второй исследуемый объект
DOI: 10.23670/IRJ.2024.139.166.2