ОШИБКИ КЛАССИЧЕСКОЙ МЕХАНИКИ. ОПОРА ВЕДЕНЕЕВА - КОТОРУЮ ИСКАЛ АРХИМЕД. НОВЫЙ КЛАСС МЕХАНИЧЕСКИХ ПЕРЕДАЧ.

Веденеев С.А.
Инженер механик. частное лицо.
ОШИБКИ КЛАССИЧЕСКОЙ МЕХАНИКИ. ОПОРА ВЕДЕНЕЕВА - КОТОРУЮ ИСКАЛ АРХИМЕД. НОВЫЙ КЛАСС МЕХАНИЧЕСКИХ ПЕРЕДАЧ.
ЧАСТЬ 1. ОШИБКИ КЛАССИЧЕСКОЙ МЕХАНИКИ.
ЧАСТЬ 2. ПРОСТРАНСТВЕННАЯ ТОЧКА ОПОРЫ ВЕДЕНЕЕВА.
ЧАСТЬ 3. БАЛАНС СИЛ САМОРЕГУЛИРОВАНИЯ, СВОЙСТВА СООТНОШЕНИЙ ПАРАМЕТРОВ ПЛАНЕТАРНЫХ ПЕРЕДАЧ.
ЧАСТЬ 4. НОВЫЙ КЛАСС КИНЕМАТИЧЕСКИХ СХЕМ.
Аннотация
Допущены просчеты в теории определения параметров планетарных передач авторами этой теории расчетов: Кудрявцевым, Решетовым, Чернавским и всеми другими их последователи, в России и за рубежом. Просчеты, ошибочная теория все это время приводят к ошибкам определения параметров планетарных передач. Да, планетарные передачи работают. Но работают только в виду того, что закладываются множество коэффициентов запаса и прочности и по контактным напряжениям и другие. Изначально теоретики основатели теории не смогли правильно сформулировать формулы определения передаточных отношений. Соответственно, не правильны формулы определения значений крутящих моментов, оборотов, передаваемой мощности по звеньям, что ведет к ошибкам конструкционного исполнения. Они не смогли, как и до сих пор никто, кроме автора настоящей статьи, создать теорию, определить зависимости планетарной передачи без метода остановки звена (водила), и в своей теории, которая преподается практически 60 лет, допустили явные, существенные ошибки, которые по сути лежат на поверхности и видны не вооруженным глазом. Все их последователи шли по ложной теории при проектировании планетарных и дифференциальных передач, передавая эти ошибки при обучении студентов. Профессионалы механики, профессоры Красноярского Политехнического Университета, еще в 2004 году отметили и зафиксировали то, что русский изобретатель Веденеев Сергей Аркадьевич открыл новый класс механических передач. Состоявшийся факт. Экспертное заключение прилагается. Изобретатель раскрыл не только новый класс механических передач, но и раскрыл формулы начала новой теории, обосновав ее экспериментально на действующих моделях. Оказалось, что теория дает определение и доказательство пространственной точки опор, опоры – которую искал Архимед. Пространственная точка опоры относиться не только к механическим передачам, но и ко всем телам сопряженного взаимодействия, в том числе космических тел (планет, галактик), атомов… Изыскания продолжаются. Краткое, ретроспективное, описание класса и кинематические схемы прилагается к данному изложению ниже. Современная классическая механика планетарных (в том числе, дифференциальных) передач держится на методе остановки звена (обычно водила). Иной методики расчетов нет. Точнее не было. Пространственная точка опоры, позволяет создавать совершенно новые механизмы, выводить новые формулы определения свойства движения и взаимодействия тел, частиц в любой пространственной точке - без опоры, без закрепления какой либо части тела, звена, частицы за тот или иной фундамент. Представим невесомость, опоры нет, например, к электродвигателю (или другому источнику энергии) подводится мощность, вращается ротор. Казалось бы, для передачи вращения статор должен быть закреплен и без его опоры работа не может совершаться. Оказывается - нет. Закрепление за фундамент не обязательно. Оказывается, существует такой баланс сил, моментов взаимодействия статора и ротора через электромагнитное поле, а в планетарных передачах между звеньями, когда то или иное звено будет изначально неподвижно, как будто оно закреплено за фундамент. НО, оно НЕ закреплено. Действует баланс сил, моментов, заключающийся в действии на звенья, тела с разных сторон потоков разветвления подводимой мощности. Необходимо понимать, что остановив за счет баланса статор, другое звено передачи мы получаем стандартный механизм. А вот при нарушении баланса, от изменения нагрузки на то или иное звено, статор, оно придет в движение. И это еще одно уникальное свойство, расширяющее неограниченно способности взаимодействующей системы тел, в том числе механических передач от получения дополнительной степени свободы, которые могут быть в значениях третьей, четвертой, и более! Кроме того известно, что сбалансирована система взаимодействия тел, частиц, при нарушении баланса взаимодействия всегда стремиться вернуться к своему балансу, если не пройден порог не возврата, если не достигнут порог разрушения. Поэтому система саморегулируема и может восстанавливать сама первоначальные параметры, изначальное положение. Именно баланс взаимодействия моментов, сил, оборотов, в некоторых случаях масс (интересная тема – массы не всегда могут учитываться, предмет изучения) между телами и звеньями является основой пространственной точки опоры. Баланс – существует везде в природе, сама природа – баланс. Нарушите его – вы погибли. В своем организме, во взаимодействии тел – везде баланс. Например, в человеке баланс температуры 36,6 градусов, нарушите его – заболели, превысите порог – погибли. Согните прут и отпустите – он вернется в исходное положение, согните больше – он вернется с остаточной деформацией, согните еще больше - он сломается. Так все, везде и всегда в природе – это ее основа, баланс. Речь не только о шестернях!
Ключевые слова: Новый класс механических передач, ошибка теории планетарных передач, новые формулы, доказательства. Опора,Архимед, Веденеев
Vedeneev S.A.
Eengineer of mechanics
ERRORS OF CLASSICAL MECHANICS. VEDENEEV'S LEG - WHICH ARCHIMED SEARCHED. NEW CLASS OF MECHANICAL TRANSMISSIONS
PART 1. ERRORS OF CLASSICAL MECHANICS.
PART 2. VEDENEYEV'S SPATIAL POINT OF SUPPORT.
PART 3. BALANCE OF FORCES OF SELF-REGULATION, PROPERTY OF RATIO OF PARAMETERS OF PLANETARY DRIVES.
PART 4. THE NEW CLASS OF KINEMATIC CONFIGURATIONS.
Abstract
Miscalculations in the theory of definition of parametres of planetary drives are supposed by authors of this theory of calculations: Kudryavtsev, Reshetovym, Chernavsky and all other their followers, in Russia and abroad. Miscalculations, the erroneous theory all this time lead to errors of definition of parametres of planetary drives. Yes, planetary drives work. But work only in an aspect of that the set of factors of a store and strength and on contact voltages and others are included. Initially theorists theory founders not could to formulate formulas of definition of reduction ratioes correctly. Accordingly, formulas of definition of values of torques, the turnovers, transmitted power on links that carries on to errors of constructional execution are not correct. They could not, as well as till now anybody, except the author of the present paper, to create the theory, to define dependences of the planetary drive without a method of a stopping of a link (spider), and in the theory which is taught practically 60 years, have committed obvious, essential errors which as a matter of fact lie on a surface and are visible not to an aided eye All their followers went under the false theory at projection epicyclic and differential drives, transmitting these errors at tutoring of students. Professionals of mechanics, профессоры Krasnoyarsk Polytechnic University, in 2004 have marked and have fixed that Russian inventor Vedeneev Sergey Arkadevich has opened a new class of mechanical transmissions. The taken place fact. The expert judgement is applied. The inventor has opened not only a new class of mechanical transmissions, but also has opened formulas of a kickoff of the new theory, having justified it experimentally on working models. It has appeared that the theory makes definition and the proof of a spatial point of legs, legs - which were searched by Archimed. The spatial point of support to treat not only to mechanical transmissions, but also to all bodies of the interfaced interaction, including space bodies (planets, galaxies), atoms … Researches proceed. Short, retrospective, the exposition of a class and kinematic configurations is applied on the given account more low. The modern classical mechanics epicyclic (including, differential) transmissions keeps on a method of a stopping of a link (usually spiders). Other technique of calculations is not present. Was not more exact. The spatial point of support, allows to create absolutely new gears, to output new formulas of definition of property of movement and interaction of bodies, particles in any spatial point - without a leg, without fixing what or parts of a body, a link, a particle for this or that foundation. Let's present imponderability, the leg is not present, for example, to the electric motor (or to other power source) is brought power, turns a rotor. It would Seem, for transmission of rotation the stator should be tightened and without its leg operation cannot be made. It appears - is not present. Fixing for the foundation not necessarily. It appears, there is such balance of forces, the moments of interaction of the stator and a rotor through an electromagnetic field, and in planetary drives between links when this or that link will be initially fixed as though it is tightened for the foundation. BUT, it is not tightened. The balance of forces, the moments, consisting in operation on links, bodies from the different sides of flows of a branching of brought power operates. It is necessary to understand that having discontinued at the expense of balance the stator, other link of transmission we receive the ongauge gear. And here at balance violation, from load change on this or that link, the stator, it will start moving. And this one more unique property expanding unrestrictedly abilities of interacting system of bodies, including mechanical transmissions from deriving of an additional degree of freedom which can be in values of the third, the fourth, and more! Besides it is known that the system of interaction of bodies, particles is balanced, at violation of balance of interaction always to aspire to return to the balance if there is not passed a threshold not backstock if will not reach a collapse threshold. Therefore the system the self-regulated also can recover itself initial parametres, initial position. The balance of interaction of the moments, forces, turnovers, in certain cases masses (an interesting theme - masses not always can be considered, a study subject) between bodies and links is the fundamentals of a spatial point of support. The balance - exists everywhere in the nature, the nature - balance. Will disturb they be you were lost. In the organism, in interaction of bodies - everywhere balance. For example, in the person balance of temperature of 36,6 degrees, will disturb they be were ill, will exceed a threshold - were lost. Bend a rod and release - it will return to a home position, bend more - it will return with a residual strain, bend even more - it will break. So everything, everywhere and always in the nature is its fundamentals, balance. Speech not only about pinion gears!
Keywords: the New class of mechanical transmissions, an error of the theory of the planetary drives, new formulas, proofs. Support, Archimed, Vedeneev
ЧАСТЬ 1. ОШИБКИ СОВРЕМЕННОЙ МЕХАНИКИ.
Доказательство не сложно.
Эти ошибки не давали точности расчетов и покоя автору, пока не были обнаружены, долгое время не позволяли найти решение определения баланса. Их значение достигает до 12 - 15 процентов и зависит от передаточного отношения. Поэтому в первую очередь о них, ошибках современной классической теории.
Итак:
На примере простого одноступенчатого планетарного редуктора.
Возьмите его в руки, если он у Вас есть, или анимацию в интерне.
Что мы видим?
Вся классическая механика говорит, что расчет планетарной передачи ведется методом остановки звена, обычно водила. Таким образом расчет передаточного отношения между ведущим звеном и водилом:
I1Н (3)=1+(Z3/Z1), (1)
где:
Z1 – число зубьев центральной шестерни;
Z3 – число зубьев зубчатого венца (по другому эпицикла или по другому, так же называемого, центральной шестерней – так уж заведено в описаниях классической механики, трехзначное наименование одного звена);
(3) – обозначает эпицикл, в скобках говорит о том, что данное звено остановлено;
1Н- индексы говорят о том, что передача момента, мощности, передаточное отношение от звена 1 к звену Н (смотри кинематическую схему Рис. 1).
Отношение
Z3/Z1=I13 (H) (2)
– передаточное отношение между центральными шестернями 1 и 3 (эпицикл).
Передаточное отношение между центральной шестерней 1 и сателлитом 2:
I12=Z2/Z1, (3)
где: Z2 – число зубьев сателлита.
ЭТО ПО КЛАССИЧЕСКОЙ ТЕОРИИ РАСЧЕТА ПЛАНЕТАРНЫХ ПЕРЕДАЧ.
См. литературу – (1), (2).
На практике, в подавляющем большинстве случаев - остановлен венец, он же эпицикл, он же центральная шестерня, а не водило!
Спрашивается, и что? Все же правильно. Ан нет.
Возьмем тот же пример, рис 1, зададимся значениями чисел зубьев звеньев (шестерен):
Z1=21
Z2=63
Z3=147
Допустим модуль зацепления m=1 мм
Тогда по классической механике передаточные отношения будут равны:
I1H (3)=1+(Z3/Z1)=1+(147/21)=8 (4)
I13 (H)=Z3/Z1=147/21=7 (5)
I12=Z2/Z1=63/21=3 (6)
Тогда, соответственно передаточным отношениям углы поворота звеньев, при одном обороте центральной шестерни 1 будут равны:
α1=360 градусов, тогда:
α2=α1/I12=360/3=120 градусов; (7)
α3=α1/I13 (H) =360/7=51,428571 градуса; (8)
αH=α1/I1H (3)=360/8=45градусов. (9)
И не правильно. Посмотрите, на какой угол повернется сателлит?!!!. Ни как не на 120 градусов!!!
Поворот сателлита (в данном случае) составит 102, (857421) градуса !!!
Здесь и кроется первоначальная ошибка классической теории расчета планетарных передач.
Что мы видим в действительности?
Для этого предлагается посмотреть наглядный пример, при возможности.
Возьмите одноступенчатый планетарный редуктор. Закрепите венец, как это на практике. Сделайте метки на одной линии на всех звеньях. Поверните центральную шестерню 1 ровно на один оборот (360 градусов). Посчитайте число зубьев, которые пройдет сателлит по венцу, замерьте углы поворота всех звеньев, а именно сателлита, водила.
И УВИДИТЕ ПОГРЕШНОСТЬ!
Углы поворота звеньев составят следующие значения:
Так как венец 3 заторможен, его угол поворота звена равен: α3=0;
Угол поворота сателлита вокруг своей оси составит α2= 102,857142 градуса, а не 120 градусов;
Сателлит пройдет по венцу и центральной шестерне, за один оборот этой центральной шестерни 1, 18 зубьев, а не 21 зуб. – что составляет его угол поворота сателлита α2= 102,857142 градуса, .
ПОЭТОМУ передаточное отношение при остановленном венце (эпицикле, центральной шестерни 3) не соответствует расчетным значениям классической механики.
Соответственно передаточное отношение между центральной шестерней 1 и сателлитом 2 равно:
I12 (3)=α1/α2=360/102,857142=3,5!!! (10)
Поэтому, в современной механике ошибка и поэтому чаще всего ломаются сателлиты.
В действительности передаточное отношение определяется совершенно по другой формуле, по формуле найденной Веденеевым:
I12 (3) =Z2/((Z1-(Z2/Z1)) (11)
I12 (3)=63/((21-(63/21))=3,5
Это соответствует действительности и является исправлением ошибки Кудрявцева и др., ошибки классической теории расчета планетарных передач.
Угол поворота водила составит αH=44,08163 градуса, а не 45 градусов. Соответственно передаточное отношение между центральной шестерней 1 и водилом Н равно:
I1H (3) =α1/αH=360/44,08163=8,1666666!!! (12)
Отсюда формула определения передаточного отношения между центральной шестерней 1 и водилом:
I1H (3) =Z3/(Z1-(Z2/Z1))!!! (13)
I1H (3)=147/(21-(63/21))=8.1666666 !!!
А передаточное отношение между ведущей шестернею и венцом записывается как удвоенное отношение между ведущей шестернею и сателлитом:
I13=2*I12=2*(Z2/(Z2-Z1)) (14)
I12=2*3,5=2*(63/(21-(63/21))=7
На основе данного примера выполняются проверки по планетарным передачам с любыми числами зубьев.
Таким образом, наличие ошибок расчета планетарных передач в современной классической механике ДОКАЗАНО.
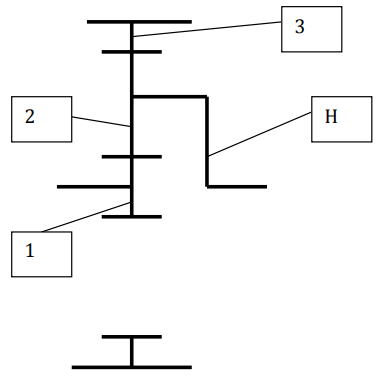
Рис 1.
ЧАСТЬ 2. ПРОСТРАНСТВЕННАЯ ТОЧКА ОПОРЫ ВЕДЕНЕЕВА.
Доказательство определения пространственной точки опоры.
Автор просто приведет формулу. Проверить можно по кинематической схеме из класса передач, раскрытого автором.
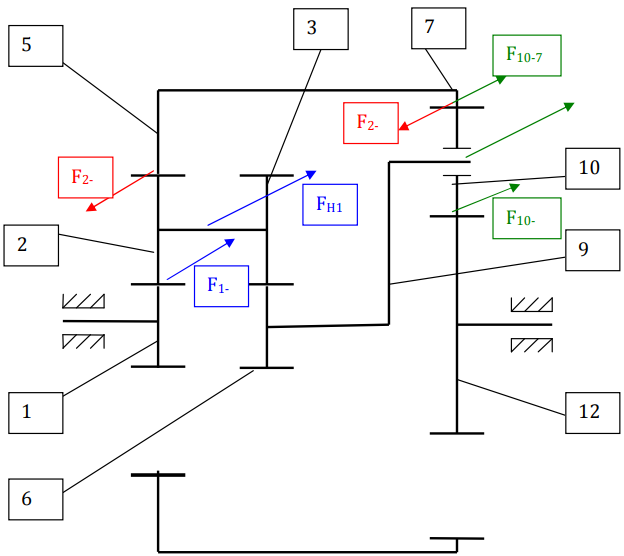
Рис. 2. Определение параметров планетарных передач без остановки звена.
Выявлено, что в отечественных и в зарубежных научных трудах нет методик определения параметров без остановки звена. Расчёты, теоретических обоснований, определение конструктивного исполнения и рабочие характеристики планетарных передач обычно ведут методом остановки водила.
Существует метод графический: Смирнова – Куцбаха, так же с заторможенным звеном – метод позволяет определять значения в статически и не подходит для расчета динамики нового класса, только для одного положения звеньев.
До сих пор не было выдвинуто эмпирической, пространственной методики расчета планетарных редукторов, без остановки какого либо звена.
Проведенные инженером Веденеевым исследования позволили определить теоретические обоснования и методики расчётов новых кинематических схем, а заодно и «старых» кинематических схем планетарных (дифференциальных) передач без остановки звена.
Таким образом, как это ни странно, найдено определение виртуальной пространственной точки опоры, которую искал Архимед. Доказано, что в любой точке пространства взаимодействующие тела (планетарные, атомарные) имеют опору в своем взаимодействии как таковом.
Примером служит формула Веденеева, для определения отношения передаточных чисел, крутящих моментов для кинематической схемы по рис. 2, через которую определяются все остальные параметры кинематической схемы планетарного вариатора:
I16=Z6/((Z1-(Z2/Z1))*((Z6/Z5)+(Z3/Z2)), (15)
где I16 – передаточное отношение между центральными шестернями (звеньями);
Z1 –число зубьев центральной шестерни (ведущей);
Z2 - число зубьев сателлита;
Z3 – число зубьев второго сателлита;
Z5 – число зубьев зубчатого венца;
Z6 – число зубьев центральной шестерни.
Формула включает поправку, указанную выше. Для других кинематических схем зависимости могут быть иными, автор их пока не приводит.
Формула ДОКАЗЫВАЕТ возможность эмпирического (пространственного) расчета параметров передач, взаимодействия тел.
На ее основе выводятся все остальные соотношения по звеньям и в целом, сил, моментов, оборотов и т. д.
ЧАСТЬ 3. СВОЙСТВО СООТНОШЕНИЙ ЗНАЧЕНИЙ ПАРАМЕТРОВ.
Новое свойство соотношения силовых параметров планетарных вариаторов.
До недавнего времени считалось константой, что сила на водиле всегда в два раза больше чем силы на шестернях планетарной передачи, т.е.:
FH=2F1=2F2=2F3
Веденеев доказывает, что эта константа не является таковой и не имеет равенства при изменении нагрузки на ведомых и/или ведущих звеньях планетарного вариатора (ПВ).
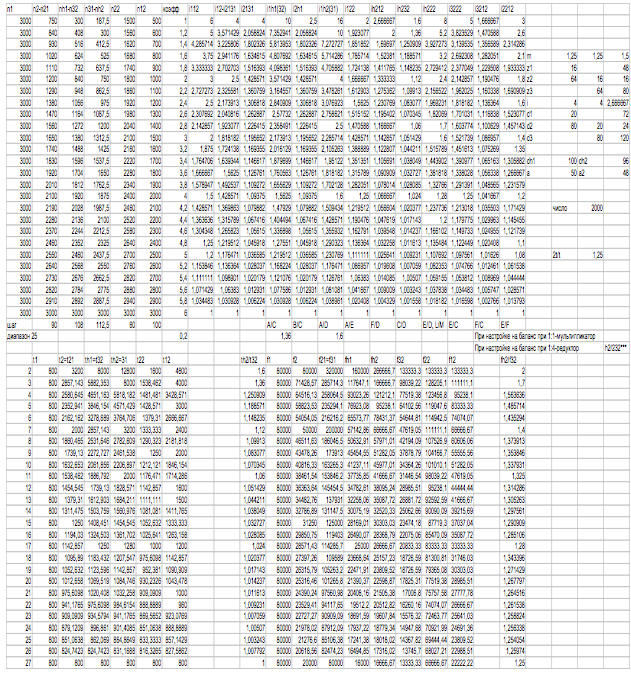
Расчет приведен на примере зубчатого исполнения одной из кинематических схем. С определенными числам зубьев, передаточными отношениями, изменением оборотов и крутящих моментов на звеньях.
В таблице ниже видно и доказывается изменение соотношения сил на звеньях и, что сила на водиле не всегда в два раза больше сил на сопряженных звеньях планетарной передачи и изменяет свое значение в определенных пропорциях и значит, что:
FH≠2F1≠2F2≠2F3
и только в миг начального воздействия нагрузки, в начальном положении, в балансе сил оно соответствует FH=2F1=2F2=2F3.
Таким образом, свойство ДОКАЗАНО.
ЧАСТЬ 4. НОВНЫЕ КИНЕМАТИЧЕСКИЕ СХЕМЫ.
Обозначения на кинематических схемах:
1-центральное звено (например, шестерня);
2-сателлит(ы);
3-сателлит(ы);
4-водило, ось сателлитов
5- центральное звено (венец);
6-центральное звено;
7-центральное звено венец;
8-центральное звено
9-водило, ось сателлитов;
10-сателлит(ы);
11-сателлит(ы);
12-центральное звено.
В соответствии задач, то или иное звено может быть ведущим или ведомым.
САМО ПО СЕБЕ ИХ НАЛИЧИЕ ДОКАЗЫВАЕТ НОВИЗНУ КЛАССА КИНЕМАТИЧЕСКИХ СХЕМ, КОТОРЫЕ НЕ ОТРАЖЕНЫ К КЛАССИЧЕСКОЙ МЕХАНИКЕ, ИХ НЕТ В УЧЕБНИКАХ И СПРАВОЧНИКАХ НИ В РОССИИ НИ ЗА РУБЕЖОМ – механические передачи без остановленного (закрепленного) звена, изменяющие передаточное отношение без вывода шестерней из зацепления и без устройств управления.
Работа и свойства класса основаны на теории и описаниях приведеных в предыдущих главах.
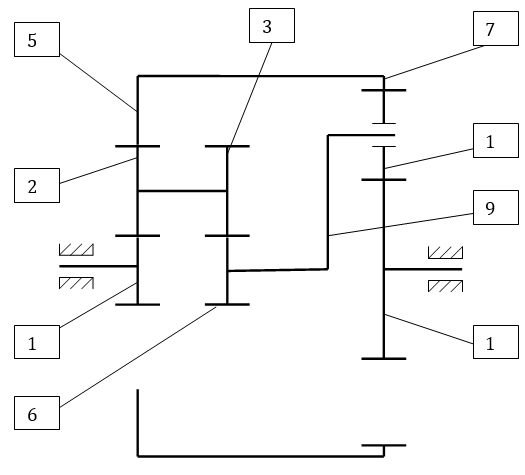
Рис. 1
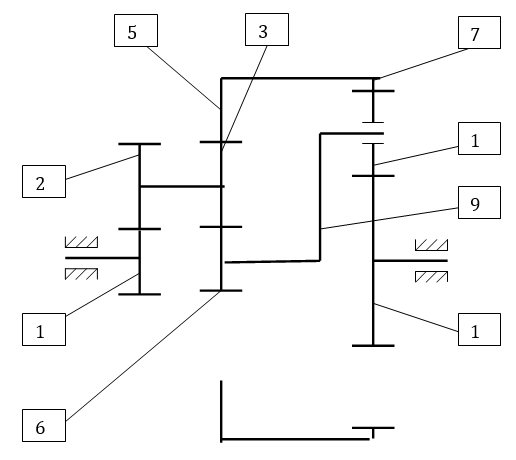
Рис. 2
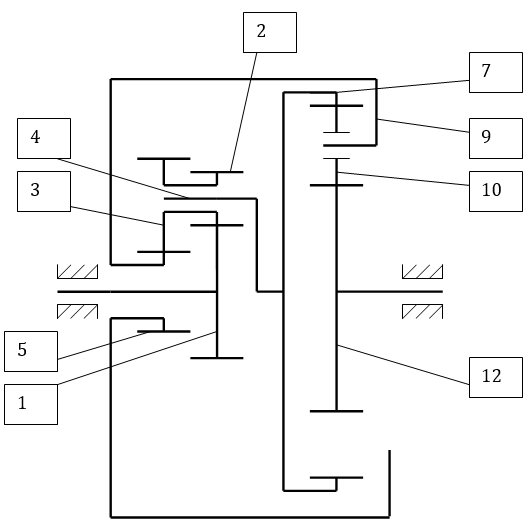
Рис. 3
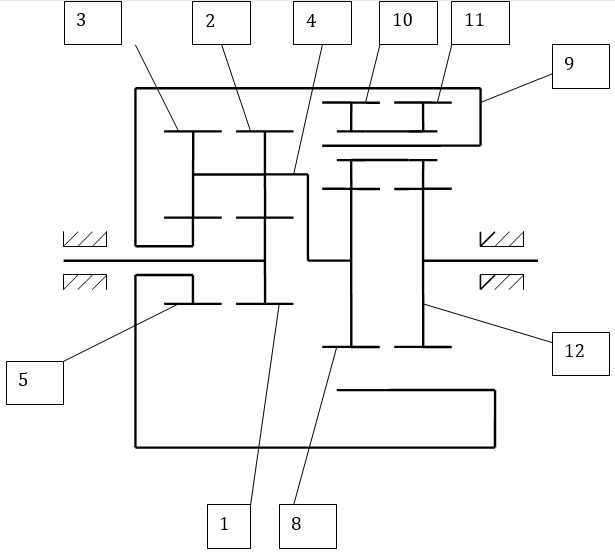
Рис. 4
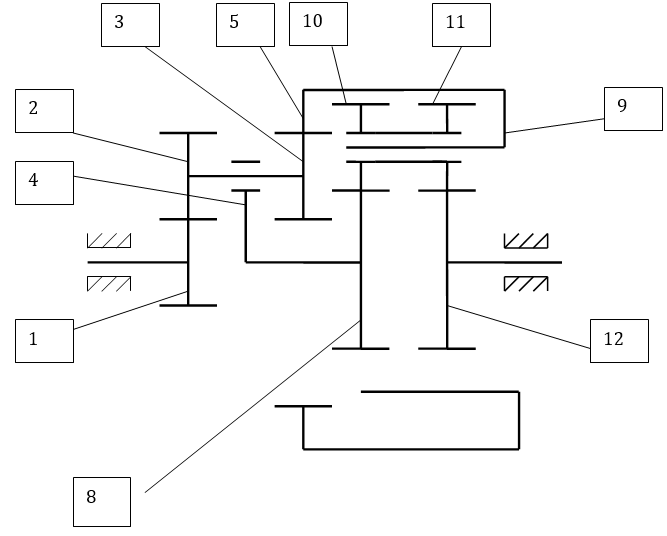
Рис. 5
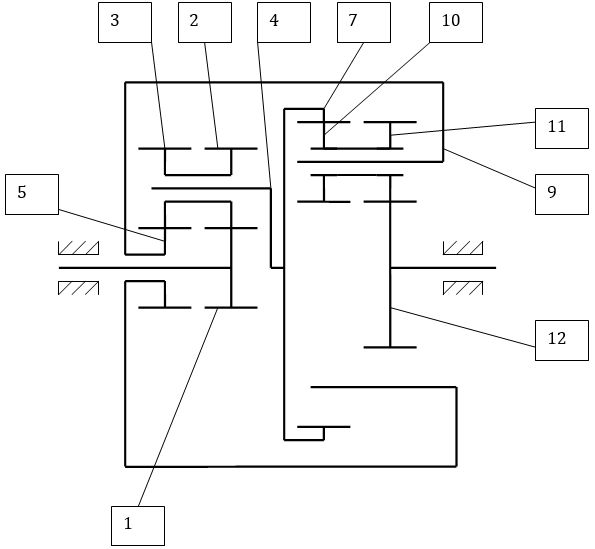
Рис. 6
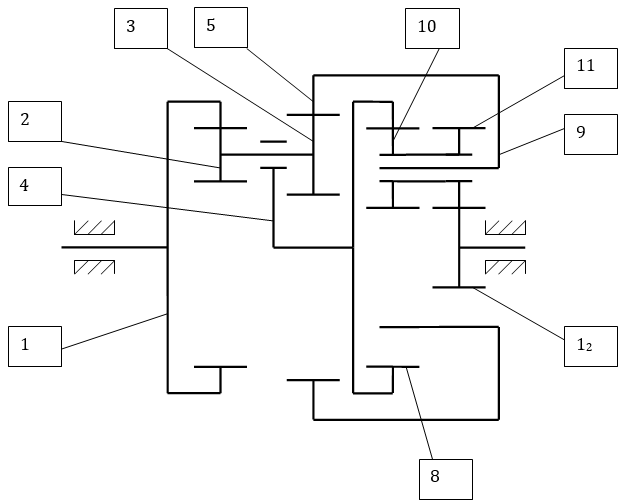
Рис. 7
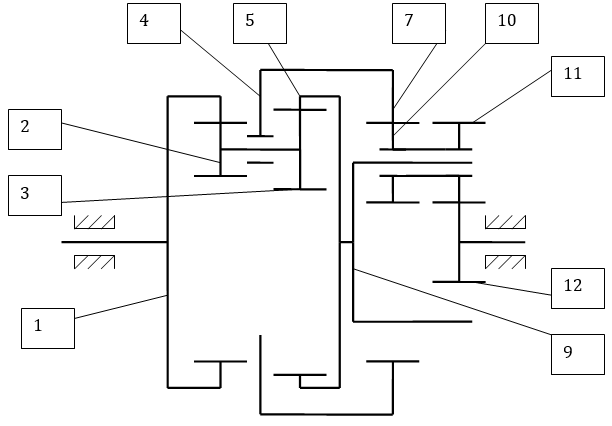
Рис. 8
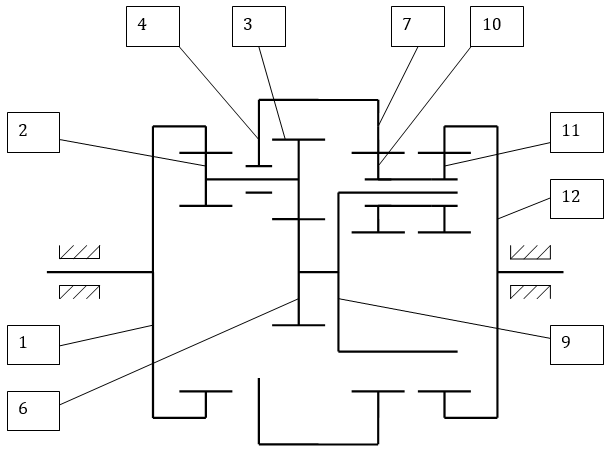
Рис. 9
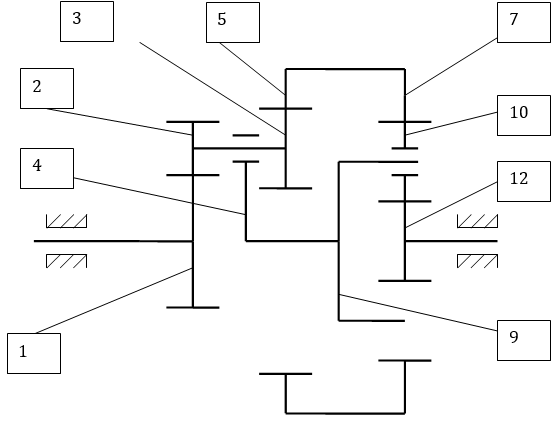
Рис. 10
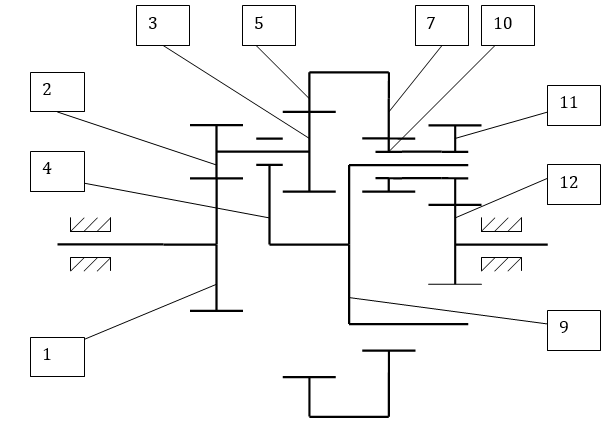
Рис. 11
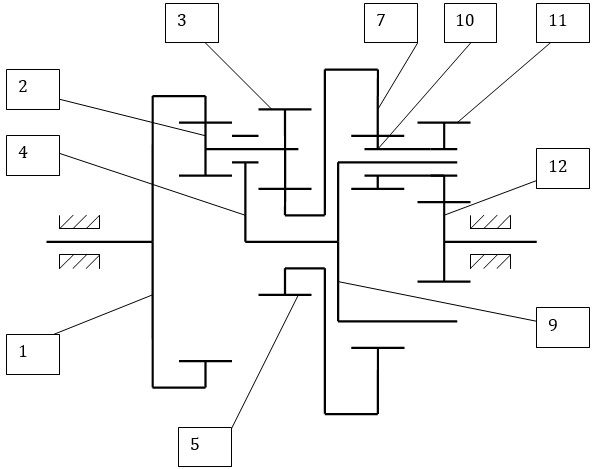
Рис. 12
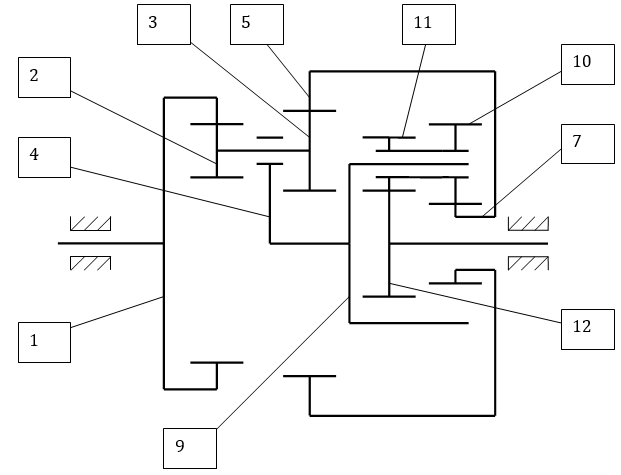
Рис. 13

Рис. 14
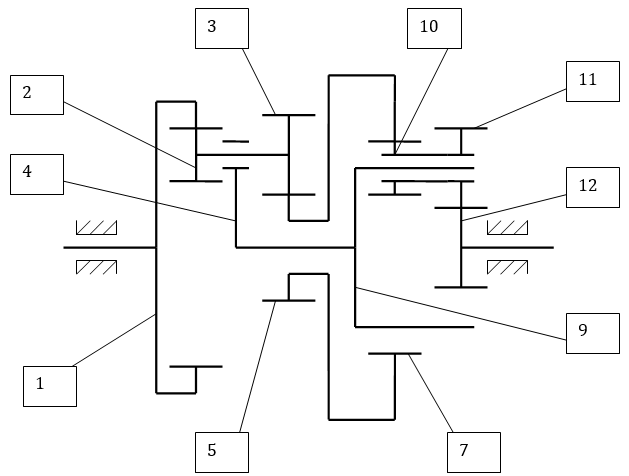
Рис. 15
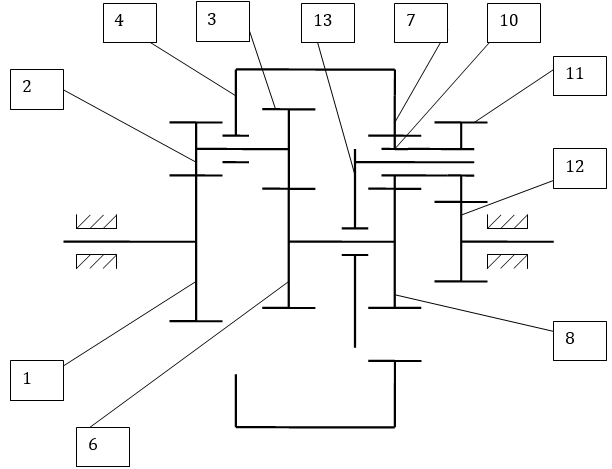
Рис. 16
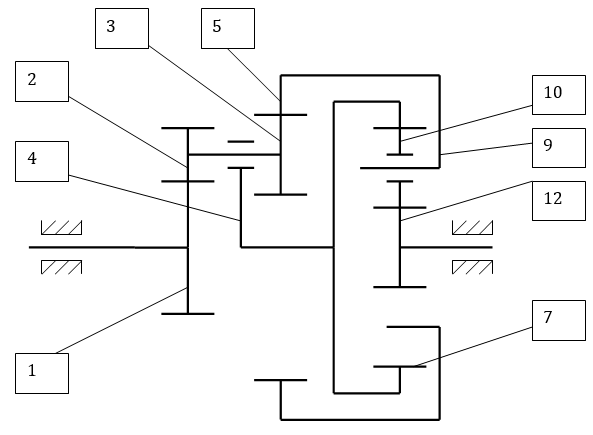
Рис. 17
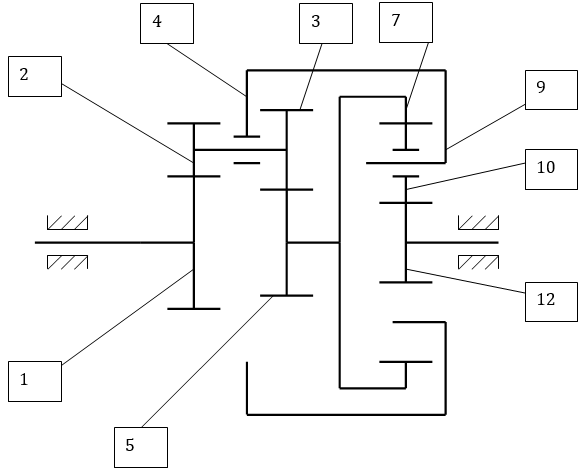
Рис. 18
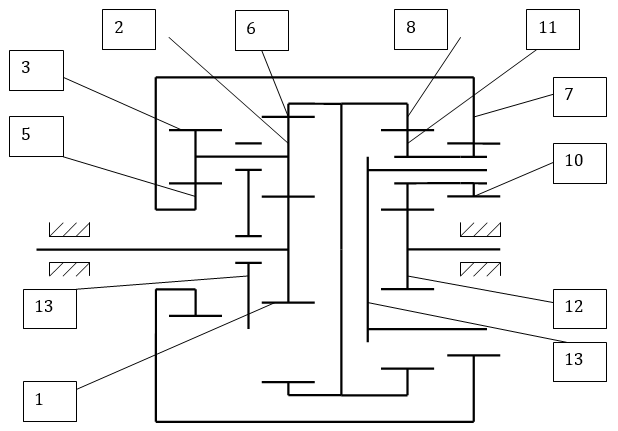
Рис. 19
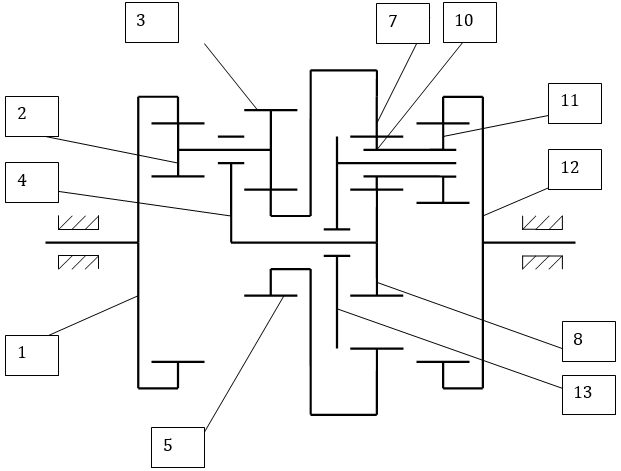
Рис. 20
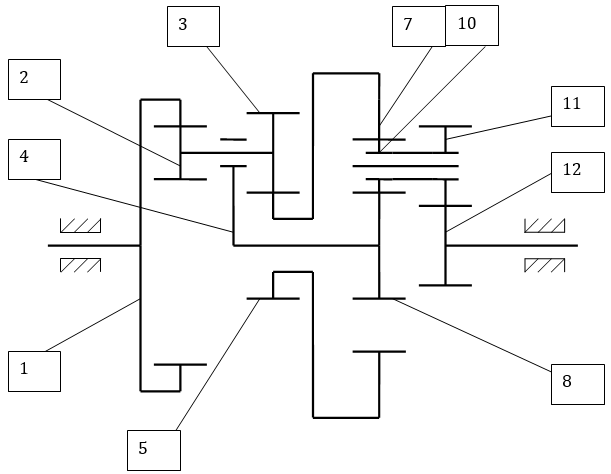
Рис. 21
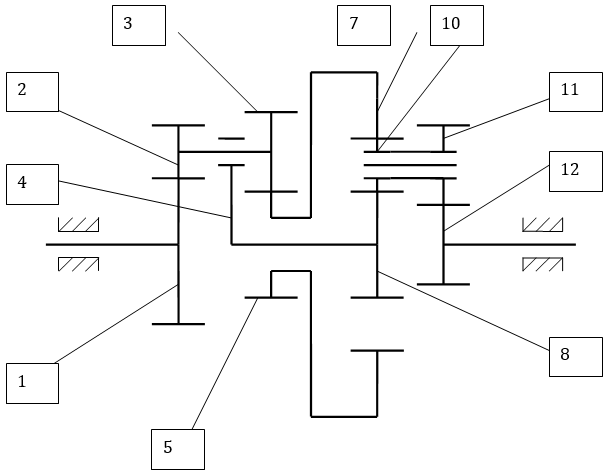
Рис. 22
Список литературы
В.Н. Кудрявцев, Ю.Н. Кирдяшев, Ю.А. Державец, А.Н. Иванов, Е.С. Кисточкин, И.С. Кузьмин, А.Л. Филиппенков: Справочник: «Планетарные передачи», Ленинград, «Машиностроение», 1977 г., 536 с. с. ил.
С.А. Чернавский, К.Н. Боков, И.М. Чернин, Г.М. Ицкович, В.П. Козинцов, «Курсовое проектирование деталей машин», Москва, «Машиностроение», 1988, 416 стр.
Список литературы
В.Н. Кудрявцев, Ю.Н. Кирдяшев, Ю.А. Державец, А.Н. Иванов, Е.С. Кисточкин, И.С. Кузьмин, А.Л. Филиппенков: Справочник: «Планетарные передачи», Ленинград, «Машиностроение», 1977 г., 536 с. с. ил.
С.А. Чернавский, К.Н. Боков, И.М. Чернин, Г.М. Ицкович, В.П. Козинцов, «Курсовое проектирование деталей машин», Москва, «Машиностроение», 1988, 416 стр.