ПОДАВЛЕНИЕ ХАОТИЧЕСКИХ КОЛЕБАНИЙ В НЕЛИНЕЙНЫХ СИСТЕМАХ С АФФИННОЙ СТРУКТУРОЙ

ПОДАВЛЕНИЕ ХАОТИЧЕСКИХ КОЛЕБАНИЙ В НЕЛИНЕЙНЫХ СИСТЕМАХ С АФФИННОЙ СТРУКТУРОЙ
Научная статья
Шашихин В.Н.1, *, Будник С.В.2
1 ORCID: 0000-0002-3718-9623;
1, 2 Санкт Петербургский политехнический университет Петра Великого, Санкт-Петербург, Россия
* Корреспондирующий автор (shashihin[at]bk.ru)
АннотацияРассматривается задача приведения хаотических режимов нелинейных систем к регулярным режимам. Стабилизация особых точек и предельных циклов достигается введением обратной связи по фазовым координатам и формированием соответствующего спектра характеристических показателей Ляпунова нелинейных систем с аффинной структурой управления. Коэффициенты обратной связи вычисляются с использованием метода модального управления, обобщенного на нелинейные системы, на основе приведения системы к канонической форме Фробениуса. Предлагаемая методика синтеза управления рассмотрена на примере нелинейной модели цепи Чуа. Результаты вычислительного эксперимента по определению спектра характеристических показателей Ляпунова и построению фазового портрета нелинейной системы подтверждают работоспособность предложенного метода подавления хаотической динамики.
Ключевые слова: системы управления, стабилизация, колебания.
SUPPRESSION OF CHAOTIC FLUCTUATIONS IN NONLINEAR SYSTEMS WITH AFFINE STRUCTURE
Research article
Shashikhin V.N.1, *, Budnik S.V.2
1 ORCID: 0000-0002-3718-9623;
1, 2 Peter the Great St. Petersburg Polytechnic University, Saint Petersburg, Russia
* Corresponding author (shashihin[at]bk.ru)
AbstractThe current article examines the problem of reducing chaotic modes of nonlinear systems to regular modes. The stabilization of singular points and limit cycles is achieved by introducing feedback on phase coordinates and forming the corresponding spectrum of Lyapunov characteristic indicators of nonlinear systems with an affine control structure. The feedback coefficients are calculated using the modal control method generalized to nonlinear systems, based on the reduction of the system to the canonical Frobenius form. The proposed method of control synthesis is examined using a nonlinear Chua chain model as an example. The results of a computational experiment to determine the spectrum of Lyapunov characteristic indicators and construct a phase portrait of a nonlinear system confirm the operability of the proposed method for suppressing chaotic dynamics.
Keywords: control systems, stabilization, fluctuations.
ВведениеОсновная часть технических объектов и процессов окружающего нас мира имеет нелинейный характер поведения. Хорошо известно, что в нелинейных системах при определённых условиях возможно возникновение детерминированного хаоса, который может играть как положительную роль, так и отрицательную. В этой ситуации проблема управления хаосом приобретает большое теоретическое и прикладное значение [1].
Среди различных задач управления хаосом можно выделить задачу подавления, имеющую важную практическую роль при нейтрализации шумов в электронных системах и вибраций в различных конструкциях [2], [3]. Задача подавления хаоса заключается в формировании управляющего воздействия, при котором вместо хаотической динамики замкнутая нелинейная система будет иметь устойчивые особые точки или периодические решения [4], [5], [6], [7].
Для стабилизации хаотических систем исторически первыми и наиболее активно развиваемыми в настоящее время являются следующие методы: метод Отта–Гребоджи–Йорке (OGY-метод) [8], метод Пирагаса [9], метод Магницкого [10]. Также для управления хаотической динамикой используются традиционные подходы и методы автоматического управления. Например, в работе [11] стабилизация хаотической системы осуществляется с помощью обратной связи по отклонению, а для выбора коэффициентов регулятора используется критерий Рауса-Гурвица. Развивается подход и на основе аналитического конструирования агрегированных регуляторов [12], основанный на идеи введения совокупности инвариантных многообразий и поэтапной декомпозиции исходной динамической системы [13].
Настоящая работа посвящена синтезу управления нелинейной системой путем введения обратной связи. Искомое управление позволяет решать задачи, как подавления хаоса, так и его усиления за счет формирования требуемого спектра характеристических показателей Ляпунова.
Постановка задачи Пусть возмущенные движения нелинейного динамического объекта описываются векторным дифференциальным уравнениемгде ![]() ‑ вектор состояния;
‑ вектор состояния; ![]() ‑ вектор управления;
‑ вектор управления; ![]() ‑ векторная функция,
‑ векторная функция, ![]() ‑ вещественные функции, определенные и непрерывные в области
‑ вещественные функции, определенные и непрерывные в области ![]() и имеющие в ней непрерывные частные производные, которые ограничены в замкнутой области
и имеющие в ней непрерывные частные производные, которые ограничены в замкнутой области ![]() .
.
Вид траекторий системы (1) определяется характеристическими показателями Ляпунова. Одна из особенностей нерегулярных режимов –неустойчивость траекторий, принадлежащих хаотическому (странному) аттрактору. Количественной мерой этой неустойчивости являются характеристический показатель Ляпунова. Среди всего набора характеристических показателей Ляпунова наиболее важен наибольший (старший) показатель ![]() . Характеристические показатели, упорядоченные по убыванию
. Характеристические показатели, упорядоченные по убыванию ![]() , задают спектр Ляпунова нелинейной динамической системы.
, задают спектр Ляпунова нелинейной динамической системы.
В нелинейных системах, помимо устойчивых особых точек и предельных циклов, аттракторами могут быть странные аттракторы. В n‑мерных нелинейных системах сигнатура спектра Ляпунова может принимать следующий вид:
| (2а) | |
| |
(2б) |
| |
(2в) |
Задача подавления хаоса состоит в преобразовании хаотического режима системы (1), который характеризуется спектром (2в), в регулярный режим со спектром (2а) или (2б), то есть обеспечить аттрактор в виде особой точки или предельного цикла.
Для решения этой задачи необходимо найти управление в виде обратной связи по фазовому вектору нелинейной системы (1)
Желаемый спектр (6) определяется требуемым характером регулярного движения системы (4).
Синтез обратной связи для линеаризованной системы
Пусть уравнение (1) описывает отклонения фазовых координат нелинейного объекта от некоторой траектории ![]() , на которой он удерживается с помощью управляющего воздействия
, на которой он удерживается с помощью управляющего воздействия ![]() . Используя формулу Тейлора в предположении дифференцируемости компонент функции
. Используя формулу Тейлора в предположении дифференцируемости компонент функции ![]() в окрестности заданной траектории
в окрестности заданной траектории ![]() , преобразуем уравнение (1) к квазилинейному виду
, преобразуем уравнение (1) к квазилинейному виду
![]()
с коэффициентом ![]()
 (7)
(7)
Здесь ![]() - матрица Якоби нелинейной системы (1). Если матрица Якоби (7) не имеет собственных чисел на мнимой оси, тогда для синтеза управления, стабилизирующего нелинейную систему (1), в силу теоремы Гробмана-Хартмана [14], может быть использовано линеаризованное уравнение
- матрица Якоби нелинейной системы (1). Если матрица Якоби (7) не имеет собственных чисел на мнимой оси, тогда для синтеза управления, стабилизирующего нелинейную систему (1), в силу теоремы Гробмана-Хартмана [14], может быть использовано линеаризованное уравнение
![]() (8)
(8)
Желаемые собственные числа матрицы Якоби (7) можно задать с помощью методики синтеза модального регулятора (3) [15]. Модальный регулятор позволяет задать желаемый характер поведения линеаризованной системы за счет выбора требуемых собственных значений матрицы Якоби замкнутой системы. Пусть линеаризованная система (8) имеет вид
где ![]() – вектор фазовых координат;
– вектор фазовых координат; ![]() – управляющее воздействие;
– управляющее воздействие; ![]() - матрица (столбец) входа.
- матрица (столбец) входа.
Требуется определить параметры ![]() линейного закона управления с обратной связью
линейного закона управления с обратной связью ![]() обеспечивающего заданные собственные числа
обеспечивающего заданные собственные числа ![]() матрицы замкнутой системы
матрицы замкнутой системы ![]() Из выражения для матрицы замкнутой системы
Из выражения для матрицы замкнутой системы ![]() нельзя непосредственно получить значения коэффициента обратной связи l, так как сама матрица
нельзя непосредственно получить значения коэффициента обратной связи l, так как сама матрица ![]() неизвестна. Поэтому используется замена переменных
неизвестна. Поэтому используется замена переменных ![]() такая, чтобы математическая модель преобразованной системы (9), замкнутой синтезируемым управлением,
такая, чтобы математическая модель преобразованной системы (9), замкнутой синтезируемым управлением,
![]() (10)
(10)
имела каноническую форму Фробениуса:
где ![]() – коэффициенты характеристического полинома матриц
– коэффициенты характеристического полинома матриц ![]() .
.
Для того чтобы привести матрицу системы к канонической форме, используется матрица T образованная из коэффициентов характеристического полинома матрицы объекта управления A следующим образом:
Для преобразования ![]() используется матрица где
используется матрица где ![]() – матрица управляемости системы. Рассмотрим подробно такое преобразование:
– матрица управляемости системы. Рассмотрим подробно такое преобразование:
![]()
Если ввести обозначения
![]()
тогда модель системы примет вид, определяемый выражением (10). Учитывая особенности построения матрицы Q, матрица системы имеет каноническую форму Фробениуса, а вектор b будет приведён к простейшему виду:
![]()
где ![]() – матрица размера , имеющая на p-й «наддиагонали» единицы, а остальные нули;
– матрица размера , имеющая на p-й «наддиагонали» единицы, а остальные нули; ![]() – единичный вектор размера n, n-я координата которого равна единице, а остальные – нулю;
– единичный вектор размера n, n-я координата которого равна единице, а остальные – нулю; ![]() – вектор коэффициентов характеристического полинома матрицы A. После выполненных преобразований матрица замкнутой системы примет вид:
– вектор коэффициентов характеристического полинома матрицы A. После выполненных преобразований матрица замкнутой системы примет вид:
![]()
Для того чтобы эта матрица имела требуемые собственные значения необходимо, чтобы коэффициенты ее характеристического уравнения соответствовали вектору ![]() – коэффициенты характеристического полинома матриц
– коэффициенты характеристического полинома матриц ![]() . Тогда
. Тогда
![]()
а коэффициенты регулятора определяются соотношением
и обеспечивают желаемые собственные значения в замкнутой системы [16].
Синтез обратной связи для нелинейной системы
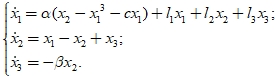
Рассмотрим методику синтеза регулятора для модели, которая в безразмерных переменных и коэффициентах имеет вид [17]:
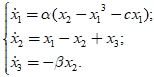 (12)
(12)
Будем использовать следующие значения параметров системы ![]() , при которых характеристические показатели Ляпунова системы Чуа (12) равны
, при которых характеристические показатели Ляпунова системы Чуа (12) равны ![]() и соответствуют спектру (2в), что свидетельствует о наличии хаоса и, следовательно, аттрактор системы - странный.
и соответствуют спектру (2в), что свидетельствует о наличии хаоса и, следовательно, аттрактор системы - странный.
Матрица Якоби (7) нелинейной системы зависит от значений фазовых координат точки, в которой она вычисляется
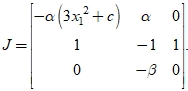 (13)
(13)
Матрица Якоби (13) при заданных параметрах системы зависит только от фазовой координаты ![]() . Выберем точку
. Выберем точку ![]() на траектории неуправляемой системы (12), в которой необходимо изменить собственные числа матрицы Якоби. Для этого рассмотрим зависимость собственного числа матрицы Якоби
на траектории неуправляемой системы (12), в которой необходимо изменить собственные числа матрицы Якоби. Для этого рассмотрим зависимость собственного числа матрицы Якоби ![]() на траектории системы (12), начинающейся в точке
на траектории системы (12), начинающейся в точке ![]() (см. рисунок 1). Из графика видно, что значение собственного числа симметрично относительно точки
(см. рисунок 1). Из графика видно, что значение собственного числа симметрично относительно точки ![]() и эта точка является точкой локального экстремума функций
и эта точка является точкой локального экстремума функций ![]() . В качестве точки
. В качестве точки ![]() выбираем точку, в которой
выбираем точку, в которой ![]() – особая точка системы (12). В точке
– особая точка системы (12). В точке ![]() матрица Якоби равна
матрица Якоби равна ![]() , а вектор её собственных значений равен.
, а вектор её собственных значений равен.
![]()
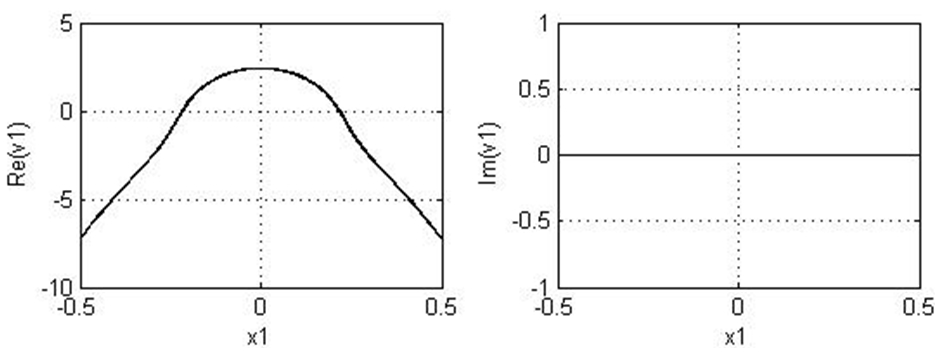
Рис. 1 – Зависимость действительной и мнимой части ![]()
Исходную систему (12) необходимо изменть так, чтобы в точке ![]() матрица Якоби
матрица Якоби ![]() замкнутой системы имела заданные собственные значения:
замкнутой системы имела заданные собственные значения: ![]() (a – параметр, близкий к единице)
(a – параметр, близкий к единице)
![]()
где ![]() – коэффициент обратной связи, который находится по формуле (11).
– коэффициент обратной связи, который находится по формуле (11).
При управлении первой компонентой фазового вектора система (12), замкнутая модальным регулятором, принимает вид
 (14)
(14)
Зависимость показателя Ляпунова ![]() имеет вид (см. рисунок 2). Из графика зависимости
имеет вид (см. рисунок 2). Из графика зависимости ![]() выбирается
выбирается ![]() так, чтобы либо сформировать предельный цикл, либо подавить хаос. Для формирования предельного цикла необходимо выбрать
так, чтобы либо сформировать предельный цикл, либо подавить хаос. Для формирования предельного цикла необходимо выбрать ![]() такой, что
такой, что ![]() . Тогда аттрактором замкнутой системы будет предельный цикл. Возьмем
. Тогда аттрактором замкнутой системы будет предельный цикл. Возьмем ![]() , так как при нём второй показатель Ляпунова минимальный. Величине
, так как при нём второй показатель Ляпунова минимальный. Величине ![]() соответствует коэффициент обратной связи
соответствует коэффициент обратной связи ![]() и спектр характеристических показателей Ляпунова (5)
и спектр характеристических показателей Ляпунова (5) ![]() . Последнее свидетельствует об устойчивости нелинейной системы (14) с синтезированным управлением.
. Последнее свидетельствует об устойчивости нелинейной системы (14) с синтезированным управлением.
График проекции траектории замкнутой системы с начальным условием ![]() на фазовую плоскость
на фазовую плоскость ![]() имеет вид (см. рисунок 3).
имеет вид (см. рисунок 3).
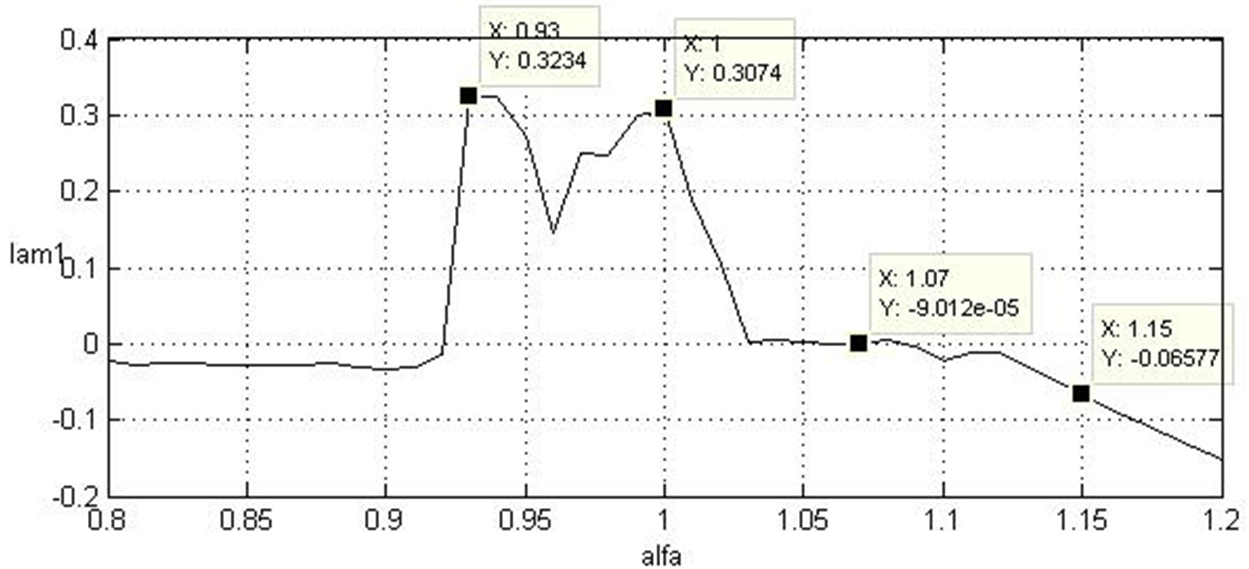
Рис. 2 – Зависимость от ![]()
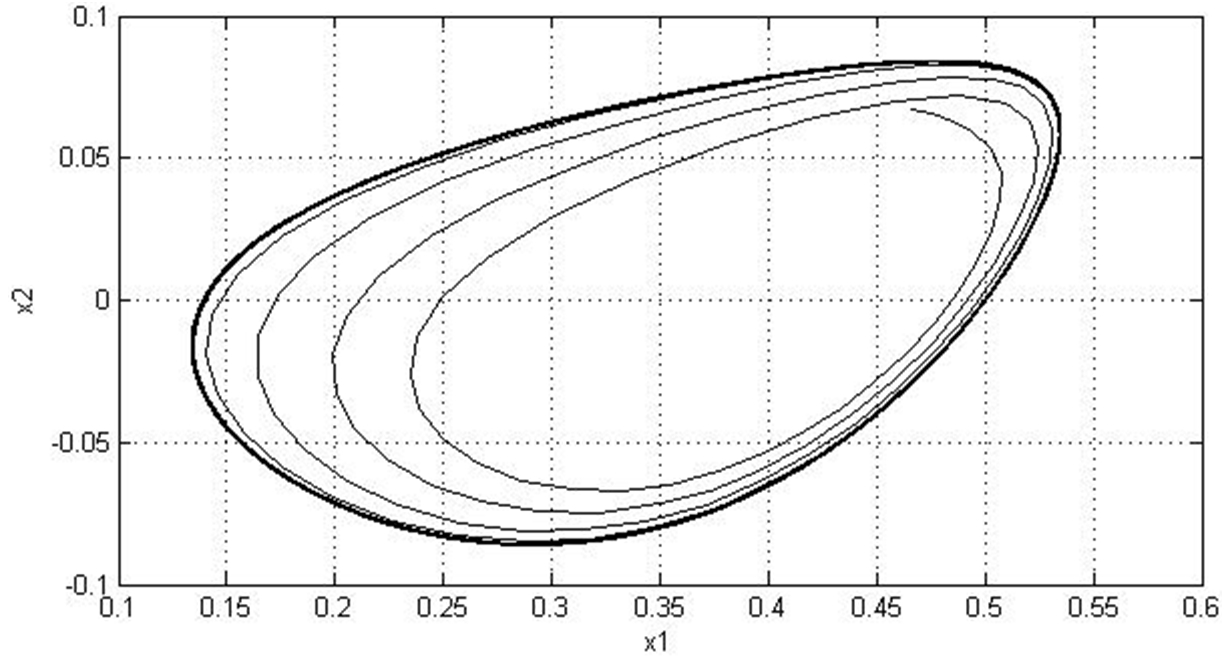
Рис. 3 – Предельный цикл системы с обратной связью
Возьмём коэффициент ![]() такой, что
такой, что ![]() , тогда аттрактором замкнутой системы будет особая точка. Выберем параметр
, тогда аттрактором замкнутой системы будет особая точка. Выберем параметр ![]() . Ему соответствуют коэффициент обратной связи
. Ему соответствуют коэффициент обратной связи ![]() и спектр отрицательных характеристических показателей Ляпунова
и спектр отрицательных характеристических показателей Ляпунова ![]() что свидетельствует об устойчивости нелинейной системы с обратной связью. График проекции траектории замкнутой системы с начальными условиями на фазовую плоскость
что свидетельствует об устойчивости нелинейной системы с обратной связью. График проекции траектории замкнутой системы с начальными условиями на фазовую плоскость ![]() имеет вид (см. рисунок 4).
имеет вид (см. рисунок 4).
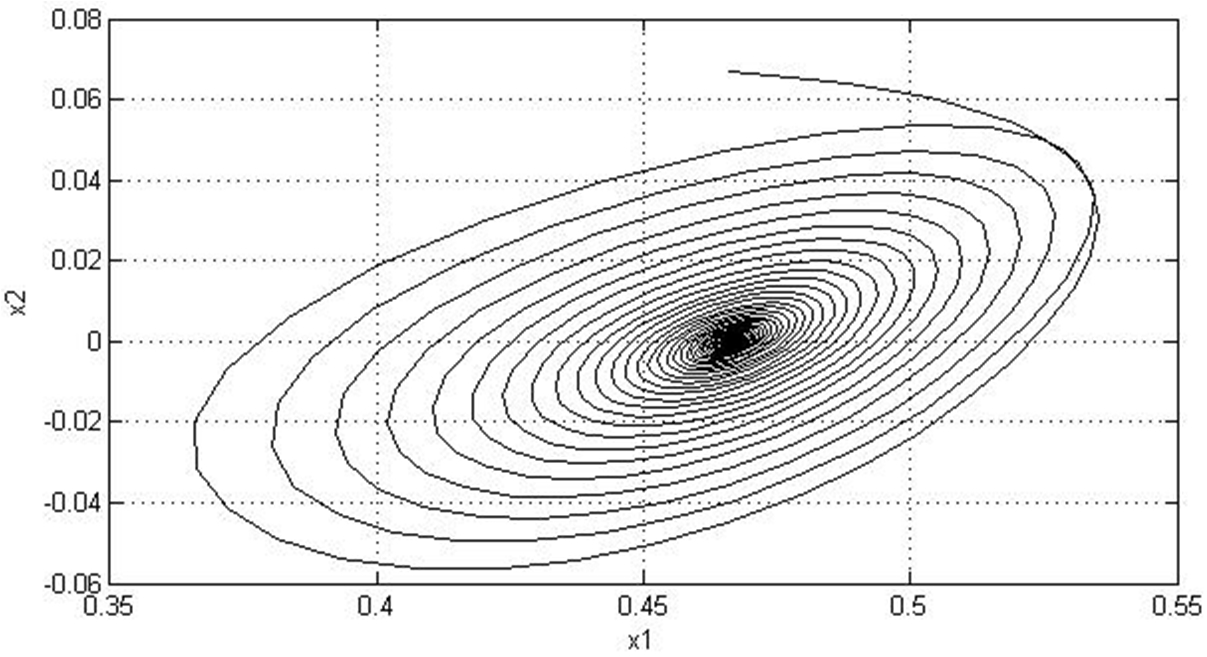
Рис. 4 – Стационарная точка системы с обратной связью
ЗаключениеПредложена методика синтеза управления, обеспечивающего подавление детерминированного хаоса в нелинейных системах с аффинной структурой. Стабилизация особых точек и предельного цикла в исходной системе с хаотической динамикой достигается формированием соответствующего спектра характеристических показателей Ляпунова. Регулятор строится в виде обратной связи по фазовым координатам с использованием метода модального управления на основе приведения системы к форме Фробениуса. Рассмотрен пример применения предлагаемой методики для синтеза управления осциллятором Чуа.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Андриевский Б.Р. Управление хаосом: Методы и приложения. Часть 1. Методы / Б.Р. Андриевский, А.Л. Фрадков // Автоматика и телемеханика. - 2003. - № 5. - С. 3-45.
- Анищенко В.С. Лекции по нелинейной динамики / В.С. Анищенко, Т.Е. Вадивасова // Известия вузов. Прикладная нелинейная динамика. - 2010. - Т. 18. - № 3. - С. 186-191.
- Малиницкий Г.Г. Структуры. Вычислительный эксперимент: введение в нелинейную динамику / Г.Г. Малиницкий // М.: Эдиториал УРСС, 2002. - 255 с.
- Лоскутов А.Ю. Основы теории сложных систем / А.Ю. Лоскутов, А.С. Михайлов // М.: Ижевск: Институт компьютерных исследований, 2007. - 272 с.
- Крищенко А.П. Подавление хаотической динамики / А.П. Крищенко, А.В. Кавинов // Дифференциальные уравнения. - 2004. - Т. 40. - № 12. - С. 1629-1635.
- Талагаев Ю.В. Стабилизация осциллятора Диффинга-Ван дер Поля оптимальной коррекцией управляющих параметров / Талагаев Ю.В., Тараканов А.Ф. // Письма в ЖТФ. - 2006. - Т. 36. - Вып. 24. - С. 1-9.
- Grebogi C. Controlling chaotic dynamical systems / C. Grebogi, Y.C. Lai // Syst. Contr. Lett. -1997. Vol. 31. N 3. P. 307-312.
- Ott E. Controlling chaos / E. Ott, C. Grebogi, G. Yorke // Phys. Rev. Lett. - 1990. - Vol. 64. - N 11. - P. - 1196-1199.
- Pyragas K. Continuous control of chaos by self-controlling feedback / K. Pyragas // Phys. Lett. A. - 1992. - Vol. 170. - N 6. - P. - 421-428.
- Магницкий Н.А. Новые методы хаотической динамики / Н.А. Магницкий, С. В. Сидоров // М.: Едиториал УРСС, 2004. - 320 с.
- Yamapi R. Harmonic oscillations, stability and chaos control in a non-linear electromechanical system / R. Yamapi, J.B. Chabi Orou // Journal of Sound and Vibration. - 2003. - Vol. 259. - N 5. - P. - 1253– 1264.
- Колесников А.А. Прикладная синергетика: основы системного синтеза / А.А. Колесников // Таганрог: Изд-во ТТИ ЮФУ, 2007. - 384 с.
- Кучерова В.Ю. Стабилизация состояний равновесия базовых нелинейных моделей с хаотической динамикой / В.Ю. Кучерова, Л.К. Кильчукова // Вестник АГТУ. Серия: Управление, вычислительная техника и информатика. - 2015. - № 3. - С. - 96-103.
- Гробман Д. Гомеоморфизм систем дифференциальных уравнений / Д. Гробман // ДАН СССР. - 1959. - Т. - № 5. - С. 880–881.
- Будник С.В. Управление крупномасштабными динамическими системами / С.В. Будник, В.Н. Шашихин //. СПб.: Изд-во Политехпресс, 2020. - 308 с.
- Козлов В.Н. Управление энергетическими системами. Ч.1. Теория автоматического управления / В.Н. Козлов, В.Е. Куприянов, В.Н. Шашихин // СПБ.: Изд-во Политехн. ун-та, 2006. - 316 c.
- Matsumoto T. Chaotic Attractor from Chua’s Circuit / T.А. Matsumoto // IEEE Transactions on Circuits & Systems. - 1984. - Vol. CAS-31. - N 12. - P. - 1055–1058.
Список литературы на английском языке / References in English
- Andrievsky B. R.Upravlenie khaosom: Metody i prilozhenija. Chast' 1. Metody [Managing Chaos: Methods and Applications. Part 1. Methods] / B. R. Andrievsky, A. L. Fradkov // Avtomatika i telemekhanika [Automation and telemechanics]. - 2003. - No. 5. - pp. 3-45 [in Russian]
- Anishchenko V. S.Lekcii po nelinejjnojj dinamiki [Lectures on nonlinear dynamics] / V. S. Anishchenko , T. E. Vadivasova // Izvestiya vysshikh uchebnykh zavedenii. Fizika’ [Higher Education Institutions Bulletin. Applied nonlinear dynamics]. - 2010. - Vol. 18. - No. 3. - pp. 186-191 [in Russian]
- Malinitsky G. G. Struktury. Vychislitel'nyjj ehksperiment: vvedenie v nelinejjnuju dinamiku [Structures. Computational experiment: an introduction to nonlinear dynamics] / G. G. Malinitsky // Moscow: Editorial URSS, 2002. - 255 p. [in Russian]
- Loskutov A. Yu. Osnovy teorii slozhnykh sistem [Fundamentals of the theory of complex systems] / Loskutov A. Yu., Mikhailov A. S. // Moscow: Izhevsk: Institute of Computer Research, 2007. - 272 p. [in Russian]
- Krishchenko A. P. Podavlenie khaoticheskojj dinamiki [Suppression of chaotic dynamics] / Krishchenko A. P., Kavinov A.V. // Differencial'nye uravnenija [Differential equations]. - 2004. - Vol. 40. - No. 12. - pp. 1629-1635 [in Russian]
- Talagaev Yu. V. Stabilizacija oscilljatora Diffinga-Van der Polja optimal'nojj korrekciejj upravljajushhikh parametrov [Stabilization of the Diffing-Van der Pol oscillator by optimal correction of control parameters] / Yu. V. Talagaev, F. Tarakanov // Pisma v ZhTF [Applied Physics Letters]. - 2006. - Vol. 36. - Issue. 24. - p. 1-9 [in Russian]
- Grebogi C. Controlling chaotic dynamical systems / C. Grebogi, Y.C. Lai // Syst. Contr. Lett. -1997. Vol. 31. N 3. P. 307-312.
- Ott E. Controlling chaos / E. Ott, C. Grebogi, G. Yorke // Phys. Rev. Lett. - 1990. - Vol. 64. - N 11. - P. - 1196-1199.
- Pyragas K. Continuous control of chaos by self-controlling feedback / K. Pyragas // Phys. Lett. A. - 1992. - Vol. 170. - N 6. - P. - 421-428.
- Magnitsky N. A. Novye metody khaoticheskojj dinamiki [New methods of chaotic dynamics] / N. A. Magnitsky, V. Sidorov // Moscow: Editorial URSS, 2004. - 320 p. [in Russian]
- Yamapi R. Harmonic oscillations, stability and chaos control in a non-linear electromechanical system / R. Yamapi, B. Chabi Orou // Journal of Sound and Vibration. - 2003. - Vol. 259. - N 5. - P. - 1253–1264.
- Kolesnikov A. A. Prikladnaja sinergetika: osnovy sistemnogo sinteza [Applied synergetics: fundamentals of system synthesis] / Kolesnikov A. A. // Taganrog: Publishing house of Taganrog Technological Institute SFU, 2007. - 384 p. [in Russian]
- Kucherova V. Yu. Stabilizacija sostojanijj ravnovesija bazovykh nelinejjnykh modelejj s khaoticheskojj dinamikojj [Stabilization of equilibrium states of basic nonlinear models with chaotic dynamics] / V. Yu. Kucherova, L. K. Kilchukova // Vestnik AGTU. Serija: Upravlenie, vychislitel'naja tekhnika i informatika [Bulletin of ASTU. Series: Management, Computer Engineering and Computer Science]. - 2015. - No. 3. - pp. - 96-103 [in Russian]
- Grobman D.Gomeomorfizm sistem differencial'nykh uravnenijj [Homeomorphism of systems of differential equations] / D. Grobman // DAN USSR. - 1959. - Vol. 128. - No. 5. - pp. 880-881 [in Russian]
- Budnik S. V. Upravlenie krupnomasshtabnymi dinamicheskimi sistemami [Management of large-scale dynamic systems] / S. V. Budnik, V. N. Shashikhin // Saint Petersburg: Izd-vo Politekhpress, 2020. - 308 p. [in Russian]
- Kozlov V. N. Upravlenie ehnergeticheskimi sistemami. Ch.1. Teorija avtomaticheskogo upravlenija [Management of energy systems. Vol.1. Automatic control theory] / Kozlov V. N., Kupriyanov V. E., Shashikhin V. N. // St. Petersburg: Publishing House of the Polytechnic University, 2006. - 316 p. [in Russian]
- Matsumoto T. Chaotic Attractor from Chua’s Circuit / T.А. Matsumoto // IEEE Transactions on Circuits & Systems. - 1984. - Vol. CAS-31. - N 12. - P. - 1055–1058.