ИМИТАЦИОННАЯ МОДЕЛЬ ПРОЦЕССА ЭКСПЛУАТАЦИИ РОБОТИЗИРОВАННОГО АГРОТЕХНИЧЕСКОГО АВТОМОБИЛЯ

ИМИТАЦИОННАЯ МОДЕЛЬ ПРОЦЕССА ЭКСПЛУАТАЦИИ РОБОТИЗИРОВАННОГО АГРОТЕХНИЧЕСКОГО АВТОМОБИЛЯ
Научная статья
Понкратова А.С.1, Орлов С.П.2, *
2 ORCID: 0000-0002-0009-9456;
1, 2 Самарский государственный технический университет, Самара, Россия
* Корреспондирующий автор (orlovsp1946[at]gmail.com)
АннотацияВ статье рассмотрена задача исследования эффективности организации технического обслуживания роботизированного автомобиля в зависимости от информации о вероятностных характеристиках событий отказов и дефектов оборудования. Предложена имитационная модель на основе стохастической раскрашенной сети Петри. Приведена общая структура модели и пример реализации модуля имитации процесса выполнения производственного задания, в котором задаются функции распределения вероятности отказов и запросов на прогнозное техническое обслуживание роботизированного автомобиля. Показано, что предлагаемый подход позволяет получить информацию для оценки параметров: остаточного ресурса автомобиля, времени до технического обслуживания, коэффициент простоя.
Ключевые слова: роботизированные автомобили, техническое обслуживание, имитационное моделирование, сети Петри.
SIMULATION MODEL OF THE OPERATION PROCESS OF AN AUTONOMOUS VEHICLE USED FOR AGRICULTURE
Research article
Ponkratova A.S.1, Orlov S.P.2, *
2 ORCID: 0000-0002-0009-9456;
1, 2 Samara State Technical University, Samara, Russia
* Corresponding author (orlovsp1946[at]gmail.com)
AbstractThe article examines the effectiveness of the organization of maintenance of an autonomous vehicle depending on the information about the probabilistic characteristics of equipment failure events and defects and proposes a simulation model based on a stochastic colored Petri net. The authors provide a general structure of the model and an example of the implementation of the module for simulating the process of performing a production task, in which the functions of the probability distribution of failures and requests for predictive maintenance of an autonomous vehicle are set. It is shown that the proposed approach allows for obtaining information for evaluating the parameters: the remaining resource of the vehicle, the time before maintenance, the downtime coefficient.
Keywords: autonomous vehicles, maintenance, simulation modeling, petri nets.
Введение
Создание роботизированных транспортных средств в настоящее время охватывает новые отрасли, в частности, сельскохозяйственное производство [1]. В Самарском государственном техническом университете в рамках федерального проекта по созданию роботизированной системы сельскохозяйственных автомобилей на базе семейства автомобилей КАМАЗ с автономным и дистанционным режимом управления были разработаны информационная система и цифровые двойники роботизированного автомобиля [2], [3].
Построение цифровых двойников агрегатов автомобиля базируется на использовании, как аналитических моделей, так и имитационных моделей, которые позволяют проверить различные сценарии выполнения производственных задач. Техническое обслуживание и ремонт роботизированного автомобиля – сложная организационная и техническая задача в силу большого числа узлов и компонентов, в том числе, и электронных приборов для системы технического зрения, измерительной системы и системы автономного управления движением. Существует ряд подходов к имитационному моделированию состояния автономных автомобилей [4], [5], [6]. Анализ существующих разработок показал, что использование стохастических раскрашенных сетей Петри обеспечивает ряд преимуществ, в первую очередь, возможность проведения статистических испытаний на модели [7], [8], [9].
В данной статье рассматривается имитационная модель на сети Петри, в которой учитываются следующие параметры роботизированного автомобиля (RA):
- остаточный ресурс,
- время до планового технического обслуживания,
- пробег автомобиля,
- вероятностные законы старения и износа деталей и узлов автомобиля,
- вероятностные законы появления отказов оборудования.
Модель производственной задачи для роботизированного агротехнического автомобиля
Временная раскрашенная сеть Петри PN описывается как [10]:
| PN = (P, T, A, C, W, M0), | (1) |
где P и T - множество позиций и множество переходов сети, ![]() - множество направленных дуг, C – конечное множество цветов, W – выражения на дугах, позициях и переходах, M0 – начальная разметка сети Петри.
- множество направленных дуг, C – конечное множество цветов, W – выражения на дугах, позициях и переходах, M0 – начальная разметка сети Петри.
Сети Петри вида (1) дают возможность строить иерархическую имитационную модель по технологии «Сверху вниз». Это значит, что вначале проектируется укрупненная структура модели, в которой каждый модуль представляет собой некоторый набор операций. Такой модуль называется подстановочным переходом, и его детальное содержание раскрывается при реализации сети Петри нижнего уровня.
В нашем случае на верхнем уровне общей имитационной модели рассматривается модель производственной задачи, представленная на рисунке 1. На рисунке 1 условные изображения для сети Петри имеют следующий смысл:
- вертикальные черные полоски обозначают элементарные переходы сети, имитирующие действия;
- прямоугольник RA – подстановочный переход, имеющий сложную внутреннюю структуру;
- кружки обозначают позиции сети Петри, содержащие условия для срабатывания переходов, а черные кружки в позициях соответствуют маркерам, перемещающимся по сети.
В начальный момент времени маркеры находятся в стартовой позиции PStart и в позиции PN, определяющей число циклов.
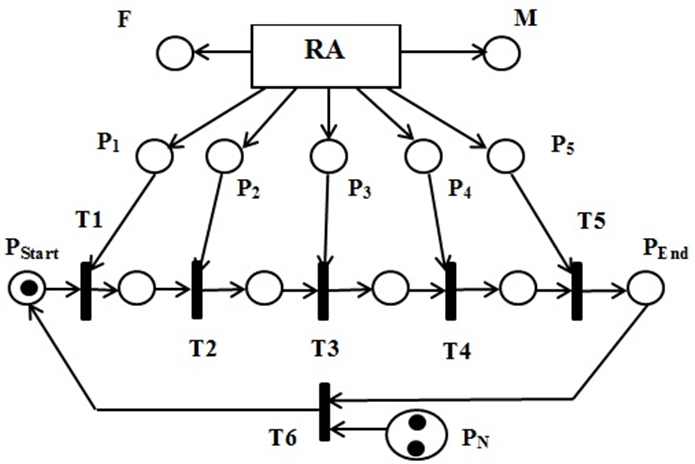
Рис. 1 – Имитационная модель производственной задачи для роботизированного автомобиля RA
Задача состоит из пяти основных операций, которые в сети Петри моделируются переходами: Т1 и Т5 – перемещение автомобиля по асфальтовым дорогам по направлению к точке выполнения технологической сельскохозяйственной операции, Т2 и Т4 – движение в полевых условиях при подходе и отходе от точки операции, Т3 - непосредственное выполнение технологической операции, Т6 – возврат на точку базирования роботизированного автомобиля. Позиции сети Петри PStart и PEnd обозначают начало и окончание производственной задачи; позиция PN содержит N маркеров, число которых определяет количество повторений производственного цикла.
Основной переход RA в данной сети Петри является подстановочным переходом [10] и, в свою очередь, представляет собой сложную сеть Петри, которая контролирует временные параметры работы роботизированного автомобиля. Позиции Р1 – Р5 разрешают выполнение соответствующих операций в случае готовности RA. Если произошел отказ оборудования автомобиля, требующий ремонта (позиция F) или автомобиль выводится на техническое обслуживание (позиция M), то соответствующий переход для операции не срабатывает, и операция приостанавливается.
Имитационная модель временных параметров автомобиля и процессов износа и старения компонентов
Роботизированный автомобиль описывается набором цветов, каждый из которых соответствует определенному параметру, задаваемому в векторе U:
| U= {id, md, rt, rl, mt, ti, ta), | (2) |
где id – номер автомобиля, md – модель автомобиля, rt – время наработки после последнего технического обслуживания, rl – остаточный ресурс, mt - период до планового технического обслуживания, ti – начало периода эксплуатации, ta – суммарное время наработки автомобиля.
На рисунке 2 приведена стохастическая раскрашенная сеть Петри, которая соответствует подстановочному переходу RA на рисунке 1. Эта сеть включает следующие компоненты.
- Позиция RU с набором цветов U, сформированным в соответствии с выражением (2), имитирует роботизированный автомобиль в процессе эксплуатации.
- Внутренний таймер модельного времени образован переходом Т1 и позициями Time1, Time2 и time. Позиция Lock обозначает условие остановки работы RA. В нашем случае принято, что в данной сети Петри единица модельного времени равна 2 часам.
- Переходы Т2 и Т3 служат для анализа модельного времени n таймера и сравнения его с параметрами в векторе U автомобиля.
Если n≥rl, то остаточный ресурс роботизированного автомобиля исчерпан и он должен выводиться на капитальный ремонт.
Если n≥mt, то наступил момент планового технического обслуживания.
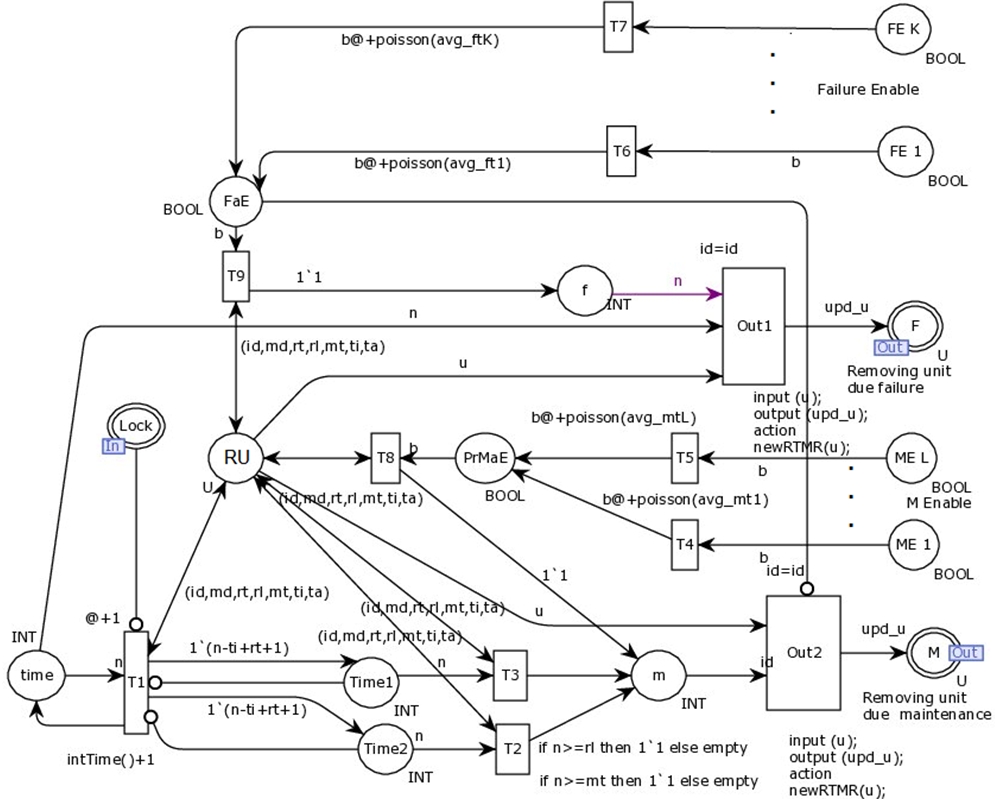
Рис. 2 – Имитационная модель роботизированного автомобиля, реализованная в программе CPN Tools
- Блок переходов и позиций, имитирующих появление отказов и запросов на прогнозное техническое обслуживание. Для этого на выходных дугах переходов Т4 и Т5 генерируются события запросов на обслуживание, что приводит к выводу роботизированного автомобиля в позицию М. Аналогично, на выходных дугах переходов Т6 и Т7 имитируются моменты отказов в RA, что приводит к выводу их на ремонт в позицию F. Количество одновременно генерируемых случайных событий отказов или обслуживания принималось не больше 5. В модели использованы пуассоновские законы с заданными значениями интенсивностей для имитации случайных событий.
Эксперименты на имитационной модели
Имитационное моделирование проводилось с использованием пакета программ CPN Tools [11], в котором есть средства для построения достаточно сложных временных раскрашенных сетей Петри. Достоинством данного пакета является также возможность имитации различных случайных величин, имеющих функции распределения по законам Пуассона, Вейбулла, Стьюдента, Гамма, нормальному закону и др.
Определение параметров вероятностных распределений отказов или пред аварийных состояний выполнялось с использованием матриц пред отказных состояний для шасси КАМАЗ 65111 [12]. Данные о старении и износе компонентов автомобиля были получены в процессе полевых испытаний опытных образцов роботизированных автомобилей.
На имитационной модели проверялись различные сценарии при разных длительностях операций, интенсивностях отказов и запросов на прогнозное обслуживание и времени перемещения автомобилей. Статистический эксперимент проводился для 1000 реализаций с периодом эксплуатации до 100 000 часов.
Основные характеристики, которые формировались в ходе имитационного эксперимента:
- время превышения планового срока выполнения производственной задачи;
- коэффициент простоя роботизированного автомобиля;
- снижение или увеличение остаточного ресурса роботизированного автомобиля при различных сценариях;
- эффективность технического обслуживания, выраженная в коэффициенте простоя роботизированного автомобиля.
Заключение
В результате исследований разработана методика имитационного моделирования процесса эксплуатации роботизированного автомобиля, цель которой заключается в определении эффективной организации сервисного обслуживания системы сельскохозяйственных автономных транспортных средств. Основной акцент сделан на управление остаточным ресурсом автомобиля при учете процессов старения и износа его компонентов и узлов.
Имитационная модель построена на основе стохастической временной раскрашенной сети Петри, что дает возможность исследовать влияние различных факторов на характеристики ремонтопригодности и надежности автомобиля. Модель имеет иерархическую структуру и может развиваться при дополнении подмоделями, выполненными также в виде сетей Петри соответствующих классов.
Проведение статистического эксперимента по имитации процесса выполнения производственных задач обеспечивает разработчиков роботизированных автомобилей информацией о перспективных технических и организационных решениях в области технического обслуживания и ремонта.
| Финансирование Работа выполнена при финансовой поддержке Министерства науки и высшего образования в рамках соглашения № 075-15-2019-1364. Проект RFMEFI57718X0286. | Funding The Ministry of Science and Higher Education of the Russian Federation supported this research in the framework of the financial agreement № 075-15-2019-1364. Project unique identifier - RFMEFI57718X0286. | |||
| Конфликт интересов Не указан. | Conflict of Interest None declared. | |||
Список литературы / References
- Emmi L. New Trends in Robotics for Agriculture: Integration and Assessment of a Real Fleet of Robots / L. Emmi L., Gonzalez-de-Soto, G. Pajares et al. // The Scientific World Journal. - 2014. - Vol. 2014. -Article ID 404059. 21 p.
- Orlov S.P. Intelligent Diagnostic System of Ro-botic KAMAZ Vehicle’s Units / S.P. Orlov, S.V. Susarev, A.I. Pugachev // Proc. of the 2019 XXI Interna-tional Conference Complex Systems: Control and Modeling Problems (CSCMP). Samara,3-6 Sept. 2019, Russia). - IEEE Xplore, 2020. - P. 307-310.
- Susarev S.V. Digital tests of the robotic chassis’ cyber-physical system for agricultural unmanned vehicle / S.V. Susarev, S.P. Orlov, A.S. Morevet al. // J. Physics: Conf. Ser. - 2019. - Vol.1399, 044032.
- Schulte P. Z. On-Board model-based fault diagnosis for autonomous proximity operations / P.Z. Schulte, A. Spenser // Proceedings of the 69th International Astronautically Congress (IAC), Bremen, Germany, 1-5 October 2018). IAC-18-C1.5.11x45016. - 2018. - P. 1-15.
- Шмелев А. В. Основы методики виртуального моделирования испытаний кабин грузовых автомобилей по требованиям пассивной безопасности / А.В. Шмелев, Э.В. Лисовский, В.С. Короткий // Механика машин, механизмов и материалов. - 2015. - № 3 (32). -C.64–72.
- Рыбаков В.Н. Концепция построения виртуальной лаборатории испытаний ГТД / В.Н. Рыбаков, В.С. Кузьмичев, А.Ю. Ткаченко // Вестник Самарского государственного аэрокосмического университета. - 2011. - № 3(27). - С. 326-331.
- Baruwa, O.T. A coloured Petri net-based hybrid heuristic search approach to simultaneous scheduling of machines and automated guided vehicles / O.T. Baruwa, M.A. Piera // Int. J. Prod. Res. – 2016. – Vol. 54. – P. 4773–4792.
- Hamroun A. Modelling and Performance Analysis of Electric Car-Sharing Systems Using Petri Nets / A. Hamroun, Labadi, M. Lazri // E3S Web Conf. - 2020. - Vol. 170, 03001.
- Orlov S.P. Application of Hierarchical Colored Petri Nets for Technological Facilities’ Maintenance Process Evaluation / S.P. Orlov, S.V. Susarev, R.A. Uchaikin //Applied Sciences. - 2021. - Vol. 11. - No. 11. - 5100.
- Jensen K. Coloured Petri Nets: Modelling and Validation of Concurrent Systems / K. Jensen, M. Kristensen. - Springer: Berlin/Heidelberg, Germany, 2009.
- CPN Tools. – [Electronic resource]. – URL: http://cpntools.org/2018/01/15/windows/ (accessed 20.05. 2021).
- Susarev S. V. Use of Previous Conditions Matrixes for the Vehicle on the Basis of Operational Information and Dynamic Models of Systems, Nodes and Units / S.V. Susarev, S.P. Orlov, A.S. Morev et al. // Proc. of the 2019 International Multi-Conference on Engineering, Computer and Information Sciences (SIBIRCON). - IEEE, 2019. – P. 0514-0519.
Список литературы на английском языке / References in English
- Emmi L. New Trends in Robotics for Agriculture: Integration and Assessment of a Real Fleet of Robots / L. Emmi L., M. Gonzalez-de-Soto, G. Pajares et al. // The Scientific World Journal. - 2014. - Vol. 2014. -Article ID 404059. 21 p.
- Orlov S.P. Intelligent Diagnostic System of Ro-botic KAMAZ Vehicle’s Units / S.P. Orlov, S.V. Susarev, A.I. Pugachev // Proc. of the 2019 XXI Interna-tional Conference Complex Systems: Control and Modeling Problems (CSCMP). Samara,3-6 Sept. 2019, Russia). - IEEE Xplore, 2020. - P. 307-310.
- Susarev S.V. Digital tests of the robotic chassis’ cyber-physical system for agricultural unmanned vehicle / S.V. Susarev, S.P. Orlov, A.S. Morev et al. // J. Physics: Conf. Ser. - 2019. - Vol.1399, 044032.
- Schulte P. Z. On-Board model-based fault diagnosis for autonomous proximity operations / P.Z. Schulte, D.A. Spenser // Proceedings of the 69th International Astronautically Congress (IAC), Bremen, Germany, 1-5 October 2018). IAC-18-C1.5.11x45016. - 2018. - P. 1-15.
- Shmelev A.V. Osnovy metodiki virtualnogo modelirovaniia ispytanii kabin gruzovykh avtomobilei po trebovaniiam passivnoi bezopasnosti [Fundamentals of the methodology for virtual simulation of testing cabins of trucks according to passive safety requirements ] / A.V. Shmelev, E.V. Lisovskii, V S Korotkii // Mekhanika mashin mekhanizmov i materialov [Mechanics of machines, mechanisms and materials]. - 2015. - № 3 (32). - P. 64–72. [in Russian].
- Rybakov V.N. Kontseptsiia postroeniia virtualnoi laboratorii ispytanii GTD [The concept of building a virtual laboratory for testing a gas turbine engine]/V.N. Rybakov, V. S. Kuzmichev, A. Iu. Tkachenko // Vestnik Samarskogo gosudarstvennogo aerokosmicheskogo universiteta [Samara State Aerospace University Bulletin]. - 2011. - № 3(27). - P. 326-331. [in Russian].
- Baruwa, O.T. A coloured Petri net-based hybrid heuristic search approach to simultaneous scheduling of machines and automated guided vehicles / O.T. Baruwa, M.A. Piera // Int. J. Prod. Res. – 2016. – Vol. 54. – P. 4773–4792.
- Hamroun A. Modelling and Performance Analysis of Electric Car-Sharing Systems Using Petri Nets / A. Hamroun, K. Labadi, M. Lazri // E3S Web Conf. - 2020. - Vol. 170, 03001.
- Orlov S.P. Application of Hierarchical Colored Petri Nets for Technological Facilities’ Maintenance Process Evaluation / S.P. Orlov, S.V. Susarev, R.A. Uchaikin //Applied Sciences. - 2021. - Vol. 11. - No. 11. - 5100.
- Jensen K. Coloured Petri Nets: Modelling and Validation of Concurrent Systems / K. Jensen, M. Kristensen. - Springer: Berlin/Heidelberg, Germany, 2009.
- CPN Tools. – [Electronic resource]. – URL: http://cpntools.org/2018/01/15/windows/ (accessed 20.05. 2021).
- Susarev S. V. Use of Previous Conditions Matrixes for the Vehicle on the Basis of Operational Information and Dynamic Models of Systems, Nodes and Units / S.V. Susarev, S.P. Orlov, A.S. Morev et al. // Proc. of the 2019 International Multi-Conference on Engineering, Computer and Information Sciences (SIBIRCON). - IEEE, 2019. – P. 0514-0519.