РАЗРАБОТКА СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ КОМПЛЕКСА СПЕЦИАЛЬНОЙ ТЕХНИКИ

РАЗРАБОТКА СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ КОМПЛЕКСА СПЕЦИАЛЬНОЙ ТЕХНИКИ
Научная статья
Омский автобронетанковый инженерный институт, г. Омск, Россия
* Корреспондирующий автор (byxovcev[at]list.ru)
АннотацияРассмотрена иерархическая структура комплекса специальной техники, как сложной динамической системы, на основании которой весь объект представлен шестью уровнями рангов элементов. На основании предложенной иерархической структуры процесс проектирования представлен фазами замкнутых конструкторских работ. В результате выделены основные этапы моделирования процесса проектирования комплекса специальной техники, на основании которых построен алгоритм автоматизации проектирования. Таким образом, использование современных средств моделирования, позволит отказаться от реальных экспериментов, учитывать максимальное количество параметров, что в итоге позволит снизить издержки, сократить время и трудозатраты, добиться оптимальных параметров.
Ключевые слова: комплекс специальной техники, иерархия структуры, алгоритм конструирования, система автоматизации проектирования.
DEVELOPING DESIGN AUTOMATION SYSTEM FOR SPECIAL EQUIPMENT COMPLEX
Research article
Bykhovtsev E. V. *
Omsk Tank-Automotive Institute of Engineering, Omsk, Russia
* Corresponding author (byxovcev[at]list.ru)
AbstractHierarchical organization of special equipment complex is viewed as a complex dynamic system, whereby the six levels of element ranks represent the whole object. Following the suggested hierarchical organization, the design process comes as phases of independent structural designing. Consequently, the main stages of modelling the special equipment complex design process are found, whereby the algorithm for design automation is developed. This way, usage of modern modelling tools can eliminate live tests, enables the consideration of the maximum amount of parameters, and that can result in keeping costs down, decreasing time expenditure and labour effort, and achieving optimum performance.
Keywords: special equipment complex, structure hierarchy, engineering algorithm, design automation system.
Комплекс специальной техники (СТ) - это сложная динамическая система (рис. 1), состоящая из базового и функционального модулей. Базовый модуль комплекса представляет собой типовое унифицированное шасси, включающее в себя корпус (раму), средства подвижности, защиты, вооружения, жизнеобеспечения, электроснабжения и др. Основное предназначение данного модуля – обеспечить размещение, хранение, защиту и доставку технологического оборудования и экипажа к месту проведения функциональных работ. Функциональный модуль включает в себя технологическое оборудование, соответствующее производственному назначению комплекса.
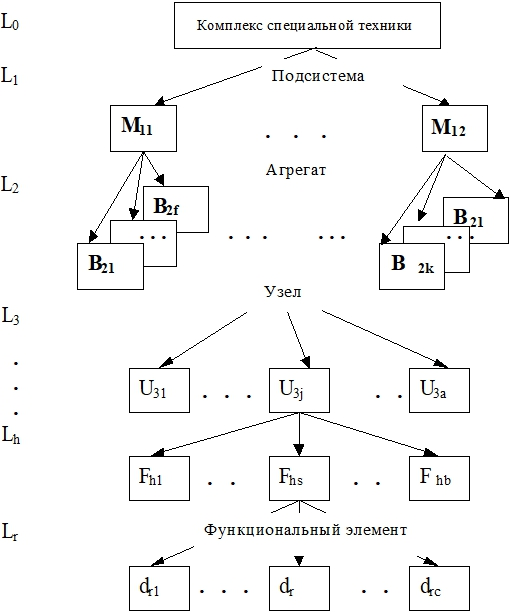
Рис.1 – Иерархическая структура комплекса специальной техники, где М - подсистем первого ранга, В - агрегаты второго ранга, U - узлы третьего ранга, F - элементы h ранга, d - простейшие функциональные элементы, условно r-ранга, L - иерархия рангов элементов
Для подобного класса систем, характерны следующие особенности:
- особые требования к тактико-техническим свойствам (подвижности, защищенности, вооруженности, командной управляемости, эксплуатационно-техническим свойствам) и технологическим характеристикам;
- системный характер структуры комплекса СТ и выполняемого с использованием его оборудования технологического процесса функционирования;
- непосредственная связь проявлений свойств надежности комплекса СТ и качества его оборудования с эффективностью. В соответствии с работами [1], [2], комплекс СТ следует рассматривать, с точки зрения его проектирования, производства и эксплуатации, как сложную многоуровневую, иерархическую структуру, которая может быть представлена, в соответствии с часто используемым общим подходом к моделированию сложных технических систем с помощью теории графов. Графами называются схемы, состоящие из точек и соединяющих их отрезки прямых или кривых [2]. Любая техническая схема может быть представлена графом, промежуточные узлы, которого соответствуют рангам элементов разного уровня детализации. На рисунке 1, представлены разные уровни иерархии: L0 - комплекс специальной техники, представляющий собой, совокупность подсистем, L1 -подсистемы, L1 -агрегаты, L1 -узлы, и L1 -функциональные элементы- первичные объекты конструкции.
Таким образом, процесс проектирования неразрывно связан с созданием технической системы и является одним из ее этапов. Значит, как предлагается в работах [1], [2] процесс проектирования можно представить, как иерархическую структуру, выраженную фазами замкнутых конструкторских работ (рис. 2).
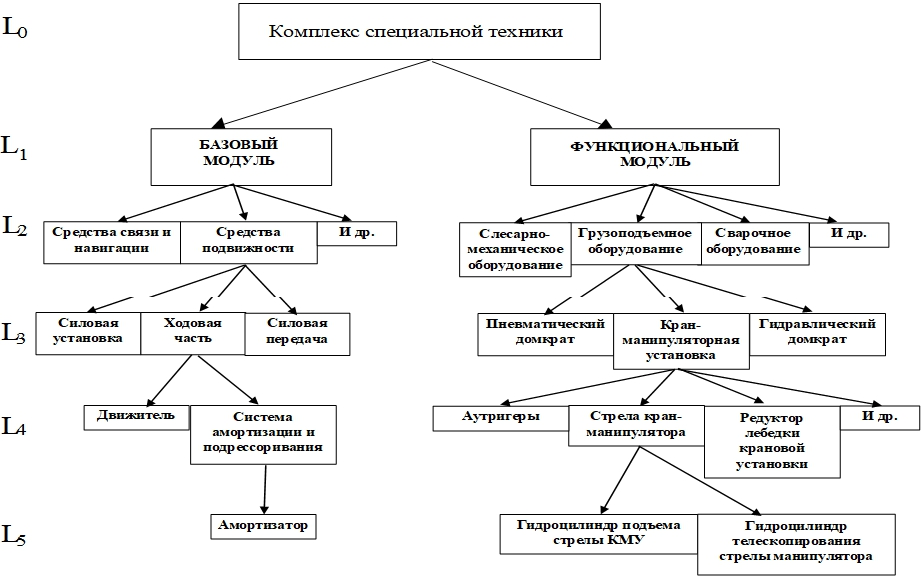
Рис.2 – Иерархическая структура комплекса специальной техники
Построение алгоритма системы автоматизации проектирования (рис. 3) комплекса специальной техники: на начальном этапе перед проектировщиком стоит задача определения потребностей и проблем, а также формулирование возможных решений, после чего создается геометрическая модель объекта, которая анализируется аналитическим моделированием и экспериментальными исследованиями.
При проектировании комплекса специальной техники, необходимо учитывать, что оба модуля объекта являются сложными системами.
На начальном этапе определяется конструкция комплекса СТ: задаются его геометрические размеры, определяется масса, технологическое оснащение и т.д., на этом этапе важно определится с выбором основных компонентов обоих модулей.
Сложность базового модуля комплекса СТ определяется множеством сочлененных конструктивных элементов, обеспечивающих реализацию определенных тактических задач и тактико-технических свойств данного средства. Основными конструктивными составными частями базового модуля комплекса являются средства обеспечения подвижности, защиты, средств связи и навигации и вооружения.
Сложность функционального модуля объекта определяется количеством технологически самостоятельных составных частей (комплектов технологического оборудования), предназначенных для выполнения частных производственных задач [3], [5], [6].
Таким образом, основная производственная задача комплекса специальной техники включает в себя два сложных процесса: выдвижение (доставку технологического оборудования и экипажа) к месту проведения функциональных работ и непосредственное выполнение этих работ. Уместно отметить, что в данном случае комплекс специальной техники представляет собой человеко-машинную систему, состоящую из экипажа и машины. Затем вводятся входные параметры также для обоих модулей, для базового модуля это такие как показатель средней скорости движения по грунтовым дорогам (шоссе), удельное давление на грунт, минимальный радиус поворота, запас хода по топливу и т.д.
Моделирование процесса проектирования комплекса специальной техники может иметь следующие этапы [7], [8]:
- Создание сборочной модели, состоящей из элементов, имеющих параметры реальных. При этом используется библиотека стандартных деталей комплексов СТ данного типа и типоразмерный ряд комплексов СТ из информационного обеспечения САПР (ИО).
- Задание динамических связей, входных параметров системы.
- Расчет с помощью математического обеспечения САПР (МО): идет расчет параметров системы.
- Визуализация результатов моделирования. Пользователь в режиме реального времени, может отслеживать изменение системы и выходные характеристики.
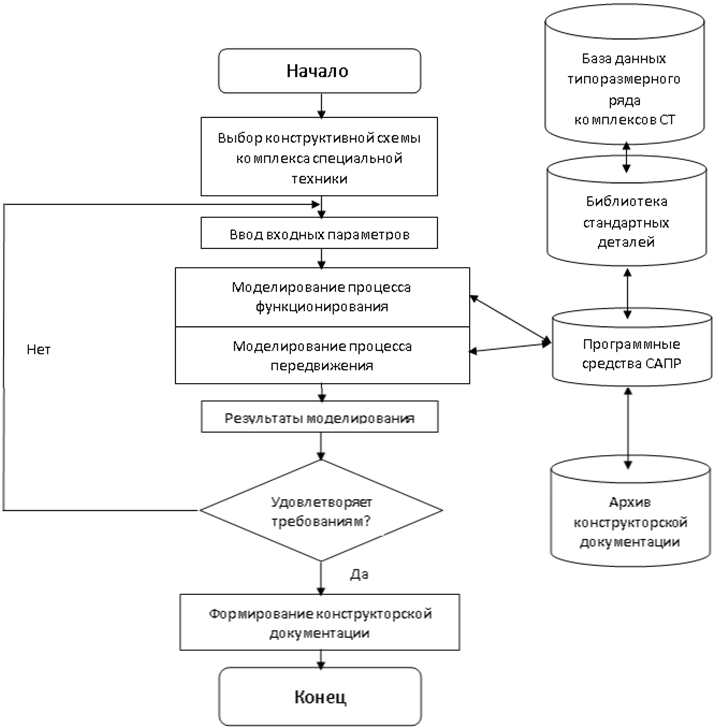
Рис. 3 – Блок-схема алгоритма системы автоматизации проектирования комплекса специальной техники
Далее в зависимости от того, удовлетворяют ли полученные результаты техническим требованиям, идет оформление конструкторской документации, либо корректируются входные параметры, для повторного расчета.
Вывод информации. Получение конструкторской документации (чертежей и тестовых документов) с применением ЭВМ не только удобно для конструктора, но и значительно сокращает сроки проектирования. Исполнение графических документов составляет до 30% трудоемкости конструкторских работ, а производительность чертежных автоматов в 400 раз превышает производительность чертежника [9]. В автоматизированном проектировании выходную информацию целесообразно представлять в виде, не требующем дополнительной обработки и соответствующем ЕСКД, хотя это и требует значительных дополнительных усилий на разработку соответствующего программного обеспечения.
Компоновочный чертеж обладает большой плотностью и наглядностью представления информации, но не дает полного количественного описания отсека. Данные о размерах элементов, координатах и установки, основные характеристики агрегата необходимо выдавать в виде таблиц с соответствующими комментариями.
Вывод графической информации. Математическое обеспечение для получения графических документов должно содержать программы:
- выбора видов, сечений, размеров;
- построения двумерного изображения;
- удаления невидимых линий;
- построения размерных линий и надписей;
- сокращения холостых проходов;
- вычерчивания.
Задача выбора видов заключается в отображении взаимного положения и относительных размеров каждого элемента компоновки при минимальном количестве избыточной информации.
Простейший алгоритм выбора видов для вычерчивания компоновки агрегата с прямоугольными параллелепипедами заключается в следующем:
- конструктор выбирает два основных вида отсека;
- для каждого вида составляется список элементов в порядке возрастания координат размещения по оси, перпендикулярной плоскости проекции;
- из списка удаляются элементы, видимые на основном виде; видимым считается прибор, два ребра которого не закрываются другими элементами;
- координаты первого из оставшихся приборов списка и определяют плоскость сечения отсека;
- список приборов корректируется, и процесс повторяется до тех пор, пока не будут получены параметры плоскостей сечения, полностью раскрывающие внешний вид компоновки. Схема алгоритма приведена на рис. 4.
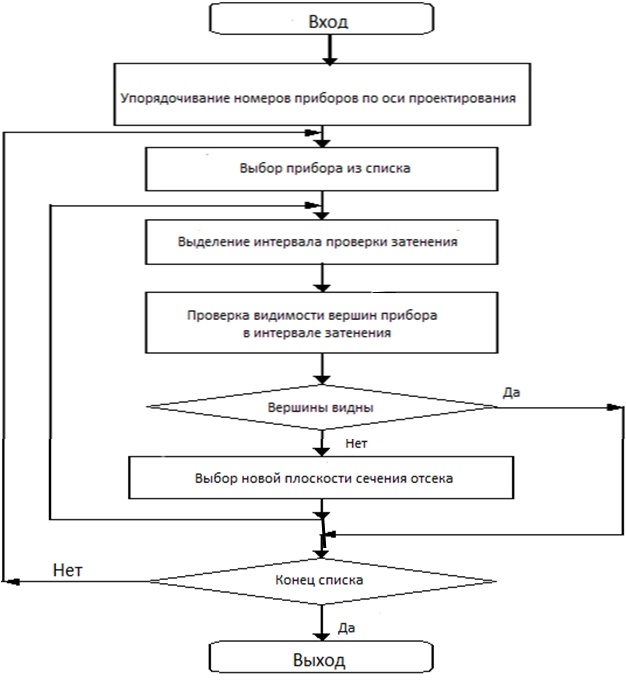
Рис. 4 – Схема алгоритма выбора видов отсека
Основная сложность при построении таких программ заключается в размещении надписей и размерных линий на свободном поле чертежа.
Построение двумерного изображения сводится к проецированию ребер приборов и образующих оболочки на соответствующую координатную плоскость [9]. Выходными параметрами программы построения чертежа являются кортежи координат вершин и признаков вычерчивания ломаной линии, образующей чертеж.
Для удаления невидимых линий в чертеже компоновки, образованной произвольно ориентированными прямоугольными параллелепипедами, использован следующий алгоритм:
- составляются списки вершин, образующих на плоскости ломаные линии, ограничивающие проекции граней параллелепипедов;
- проверяется пересечение ребер для каждой пары проекций граней; для пересекающихся ребер определяются координаты точек пересечения (на плоскости);
- видимость отрезков ребер определяется положением вершин одной грани относительно плоскости другой;
- списки вершин, образующих ломаные линии, дополняются точками пересечения ребер в соответствии с условиями видимости; невидимые вершины исключаются из списков.
Таким образом, выходная информация алгоритма представляет собой списки координат вершин, образующих видимые линии компоновки. Схема алгоритма представлена на рис. 5.
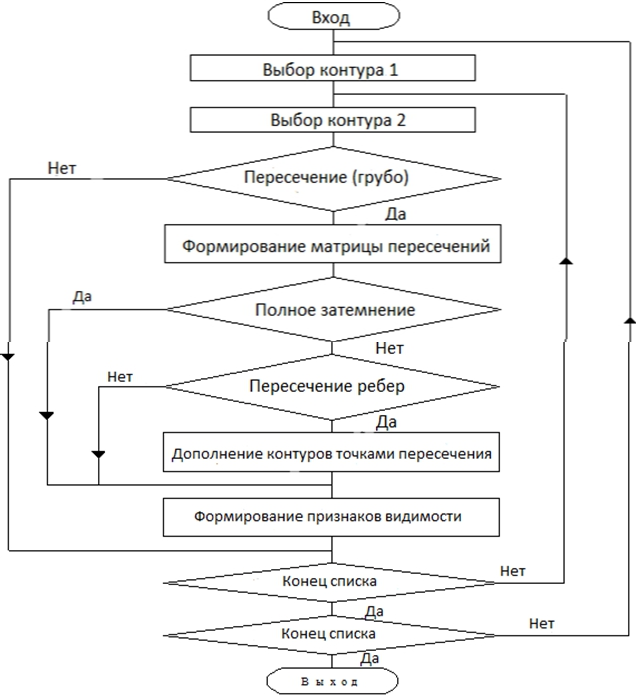
Рис. 5 – Схема алгоритма удаления невидимых линий
Программы построения размерных линий и надписей используют стандартные блоки библиотеки ГРАФОР [10].
Следует отметить, что алгоритм автоматизации проектирования (рис.3), применим для различных программных продуктов САПР, имеющих развитое математическое обеспечение (МО) и графический редактор, позволяющий моделировать объект в 3D режиме. Это такие программы, как Solid Works, ANSYS, Cosmos, АРМ Structur 3D и др. Использование современных средств моделирование, позволит отказаться от реальных экспериментов, учитывать при проектировании, максимальное количество параметров, а в итоге снизить издержки, сократить время и трудозатраты, добиться оптимальных параметров.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Ахтулов, А.Л. Методология построения и практического применения систем автоматизации проектирования транспортных машин [Текст] / А.Л. Ахтулов // Вестник сибирской автомобильно-дорожной академии. 2004. Выпуск 3. С.14-29
- Зыков, А.А. Основы теории графов [Текст] / А.А. Зыков. М.: Наука, 1987. 664 с.
- Методика оценки военно-технического уровня ПСР БТВТ / испол. Е.Г. Соболев [и др.] / НИИЦ БТ 3 ЦНИИ МО РФ. 2018. – 74 с. – Инв. № 4103.
- Концепция развития подвижных средств восстановления вооружения и военной техники до 2025 года: Е.Г. Соболев и [др.].: НИИЦ БТ 3 ЦНИИ МО РФ, 2017. – 202 с.
- Свирин, Р.В. Обоснование состава технологического оборудования в ремонтно-восстановительных органах для ремонта танков в условиях ведения боевых действий: дис. ...канд. техн. наук / Р.В. Свирин. в.ч. 68054, 1998. – 200 с.
- Ильин, А.В. Обоснование требований к бронированным ремонтно-эвакуационным машинам по технологическим свойствам [Текст]: дисс. … канд. техн. наук. 38 НИИИ МО РФ, 2005. – 220 с.
- Ахтулов, А.Л. Обеспечение качества проектирования мостовых кранов с учетом динамических характеристик: монография [Текст] / А.Л. Ахтулов, Л.Н. Ахтулова [и др.]; под общ. ред. А.Л. Ахтулова. Омск: СибАДИ, 2010. 137 с.
- Ахтулов, А.Л. Визуальное моделирование двухбалочного мостового крана как сложной динамической системы [Текст] / А.Л. Ахтулов, Л.Н. Ахтулова [и др.] // Омский научный вестник. 2014. № 1 (127). С. 147-152
- Hakala M.K. Currenttrends in vibration calculation methods // Sеminar on Shiр vibration, 24-th ESPOO. - 1982. - Vol. 24. - рр. 115-134.
- Автоматизированное проектирование. Геометрические и графические задачи / В.С. Полозов, О.А. Буденов, С.И. Ротков, Л.В. Широкова. - М.: Машиностроение, 1983. - 280 с.
Список литературы на английском языке / References in English
- Akhtulov, A.L. Metodologija postroenija i prakticheskogo primenenija sistem avtomatizacii proektirovanija transportnyh mashin [Methodology for the construction and practical application of automation systems for the design of transport vehicles] [Text] / A.L. Akhtulov // Bulletin of the Siberian Automobile and Highway Academy. 2004. Issue 3. P.14-29 [in Russian]
- Zykov, A.A. Osnovy teorii grafov [Fundamentals of graph theory] [Text] / A.A. Zykov. M.: Nauka, 1987.664 s.
- Metodika ocenki voenno-tehnicheskogo urovnja PSR BTVT [Methodology for assessing the military-technical level of the PSR BTVT] / executive. E.G. Sobolev [et al.] / NIIC BT 3 Central Research Institute of the Ministry of Defense of the Russian Federation. 2018.- 74 p. - Inv. No. 4103. [in Russian]
- Koncepcija razvitija podvizhnyh sredstv vosstanovlenija vooruzhenija i voennoj tehniki do 2025 goda [The concept of the development of mobile means of restoring weapons and military equipment until 2025:] E.G. Sobolev and [other].: NIIC BT 3 Central Research Institute of the Ministry of Defense of the Russian Federation, 2017. - 202 p. [in Russian]
- Svirin, R.V. Obosnovanie sostava tehnologicheskogo oborudovanija v remontno-vosstanovitel'nyh organah dlja remonta tankov v uslovijah vedenija boevyh dejstvij: dis. ...kand. tehn. nauk [Justification of the composition of technological equipment in the repair and restoration bodies for the repair of tanks in the conditions of warfare: dis. ... cand. tech. sciences] / R.V. Svirin. h 68054, 1998.- 200 p. [in Russian]
- Ilyin, A.V. Obosnovanie trebovanij k bronirovannym remontno-jevakuacionnym mashinam po tehnologicheskim svojstvam [Justification of requirements for armored repair and recovery vehicles by technological properties] [Text]: diss. ... cand. tech. sciences. 38 NIIII MO RF, 2005. - 220 p. [in Russian]
- Akhtulov, A.L. Obespechenie kachestva proektirovanija mostovyh kranov s uchetom dinamicheskih harakteristik: monografija [Ensuring design quality of bridge cranes taking into account dynamic characteristics: monograph] [Text] / A.L. Akhtulov, L.N. Akhtulova [et al.]; under the general. ed. A.L. Akhtulova. Omsk: SibADI, 2010.137 p. [in Russian]
- Akhtulov, A.L. Vizual'noe modelirovanie dvuhbalochnogo mostovogo krana kak slozhnoj dinamicheskoj sistemy [Visual modeling of a two-girder bridge crane as a complex dynamic system] [Text] / A.L. Akhtulov, L.N. Akhtulova [et al.] // Omsk Scientific Herald. 2014. No. 1 (127). P. 147-152 [in Russian]
- Hakala M.K. Currenttrends in vibration calculation methods // Sеminar on Shiр vibration, 24-th ESPOO. - 1982. - Vol. 24. - рр. 115-134.
- Avtomatizirovannoe proektirovanie. Geometricheskie i graficheskie zadachi [Computer aided design. Geometric and graphical problems] / V.S. Polozov, O.A. Budenov, S.I. Rotkov, L.V. Shirokova. - M.: Mechanical Engineering, 1983. - 280 p. [in Russian]