ВОПРОСЫ ПОЗИЦИОНИРОВАНИЯ ПРОЕКТИРУЕМОГО ИЗДЕЛИЯ В СИСТЕМАХ КОНСТРУКТОРСКОЙ ГРАФИКИ

ВОПРОСЫ ПОЗИЦИОНИРОВАНИЯ ПРОЕКТИРУЕМОГО ИЗДЕЛИЯ В СИСТЕМАХ КОНСТРУКТОРСКОЙ ГРАФИКИ
Научная статья
Поликарпов Ю.В.1, *, Семашко М.А.2, Худякова Л.П.3, Яруллин Ч.А.4
1 ORCID: 0000-0002-5297-6983;
2 ORCID: 0000-0002-0699-1445;
3ORCID: 0000-0002-7286-2828;
4ORCID: 0000-0001-7924-4558,
1, 2, 3, 4 Уфимский государственный авиационный технический университет, Уфа, Россия
* Корреспондирующий автор (puv[at]ufanet.ru)
АннотацияВ связи с использованием на машиностроительных предприятиях для создания новых изделий систем автоматизированного проектирования (САПР), которые решают поставленные задачи в трехмерном пространстве, актуальной становится проблема ориентации и перемещения в этом пространстве. В статье рассматриваются вопросы, которые приходится решать студентам младших курсов, приступая к практическому освоению систем конструкторской графики. К таким вопросам относится и вопрос выбора одной из предложенных САПР схем ориентации модели создаваемого изделия в пространстве: метода первого угла (метод Е) и метода третьего угла (метод А) и их разновидностей. Рассматривается также вопрос базирования деталей в пространстве сборки при выполнении твердотельной модели изделия способом восходящего проектирования с учетом числа степеней свободы, связываемых различными видами позиционирующих сопряжений.
Ключевые слова: твердотельная модель сборки, разновидности метода проецирования, базирование деталей, сопряжения, степени свободы компонентов.
ISSUES OF POSITIONING OF DESIGNED PRODUCT IN SYSTEMS OF CONSTRUCTIVE GRAPHICS
Research article
Polikarpov Yu.V.1, *, Semashko M.A.2, Khudyakova L.P.3, Yarullin Ch.A.4
1 ORCID: 0000-0002-5297-6983;
2 ORCID: 0000-0002-0699-1445;
3ORCID: 0000-0002-7286-2828;
4ORCID: 0000-0001-7924-4558,
1, 2, 3, 4 Ufa State Aviation Technical University, Ufa, Russia
* Corresponding author (puv[at]ufanet.ru)
AbstractDue to the use of computer-aided design (CAD) systems for the development of new products in machine-building enterprises, which solve the tasks in three-dimensional space, the problem of orientation and movement in this space becomes topical. The article deals with the problems that students of the junior courses have to solve, starting their practical development of the systems of design graphics. These issues include the choice of the proposed CAD schemes for orienting the model of the developed product in space: the method of the first angle (method E) and the method of the third angle (method A) and their varieties. The question of basing details in the assembly space is also considered when performing the solid model of the product in the form of an ascending design, taking into account the number of degrees of freedom that are connected by different types of positioning interfaces.
Keywords: solid model of the assembly, varieties of projection method, basing of details, conjugation, the degree of freedom of components.
В настоящее время практически на всех машиностроительных предприятиях создание новых изделий осуществляется с помощью современных систем автоматизированного проектирования (САПР). Для выполнения поставленных задач системе необходимо, в первую очередь, создать внешний и внутренний облик изделия. Решение этой сложной проблемы берёт на себя одна из подсистем САПР, входящая в ядро системы автоматизированного проектирования и называемая системой геометрического моделирования [1, С. 115]. Создавая облик нового изделия такие системы оперируют трехмерными алгоритмами решения метрических и позиционных задач, что обеспечивает проектирование изделий в трехмерном пространстве, а не на плоскости, как было до применения САПР. Промежуточные результаты проектирования системы выводят на плоский экран обычного монитора в виде аксонометрического изображения созданного изделия (т.е. на экране создается имитация трехмерного пространства). В связи с этим одной из проблем, с которыми сталкиваются начинающие проектировщики, является проблема уверенной и правильной ориентации в трехмерном пространстве и перемещения в заданном направлении на нужное расстояние. Дисциплины, входящие в учебные планы машиностроительных направлений и специальностей подготовки в технических вузах и отвечающие за формирование у молодых специалистов графических компетенций, по мнению авторов, не уделяют достаточно внимания решению этой проблемы. Поэтому многие студенты, приступая к освоению систем автоматизированного проектирования и выполняя свои первые проекты испытывают определённые трудности в решении стоящих перед ними геометрических задач в трехмерном пространстве или на аксонометрическом изображении этого пространства. Это объясняется тем, что выпускники средней школы имеют лишь опыт решения геометрических задач на плоском чертеже, т.к. дисциплину стереометрию, в которой рассматриваются пространственные алгоритмы решения позиционных и метрических задач, в школе уже более 40 лет не изучают. В связи с этим многие студенты младших курсов на начальных этапах изучения систем конструкторской графики по привычке переводят монитор компьютера в режим плоского чертежа и отображения проекций проектируемого изделия. И это длится до тех пор, пока они на своём опыте не осознают всех преимуществ пространственного проектирования. И лишь после этого пользователи начинают работу в трехмерном пространстве.
В статье рассматриваются вопросы, которые позволят начинающим пользователям систем автоматизированного проектирования быстрее адаптироваться к работе в пространстве и начать решать поставленные задачи, осмысленно выбирая одну из предложенных системой автоматизированного проектирования схем ориентации модели создаваемого изделия в пространстве. Во второй части статьи рассмотрен вопрос базирования деталей в пространстве сборки при выполнении твердотельной модели изделия способом восходящего проектирования.
Как известно в настоящее время при построении изображений какого-либо изделия на чертеже используется метод ортогонального проецирования. При этом применяются две его разновидности [2, С. 2-4]:
1) метод первого угла (метод Е), когда изображаемое изделие располагают между наблюдателем и соответствующей плоскостью проекций (принят в Российской Федерации и большинстве стран Европы) – ГОСТ 2.305-2008 [3, С. 2];
2) метод третьего угла (метод А), когда плоскость проекций располагают между наблюдателем и изображаемым изделием (принят в Англии, США и в некоторых других странах) – стандарт ISO 5456 [4], [5], [6], [7].
Шесть граней куба принимают за основные плоскости проекций, совмещаемые затем с плоскостью чертежа. В обоих методах изображение на фронтальной плоскости проекций является главным (вид спереди или главный вид). Остальные виды располагаются вокруг главного вида так, как показано на рисунках 1 (метод Е) и 2 (метод А).
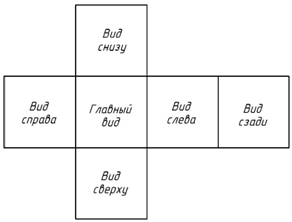
Рис. 1 – Расположение основных видов в методе Е
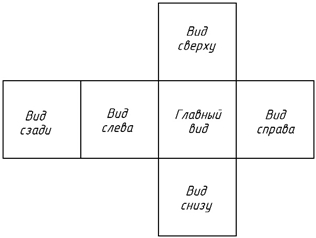
Рис. 2 – Расположение основных видов в методе А
Отличие двух методов друг от друга заключается в том, что меняются местами вид слева и вид справа, вид сверху и вид снизу, а вид сзади располагается слева. Современные системы автоматизированного проектирования (например, КОМПАС версии 17) предоставляют пользователю широкие возможности по использованию как метода Е, так и метода А. В системе КОМПАС можно применить по три разновидности каждого метода, которые отличаются ориентацией осей координат:
метод Е – X-аксонометрия, Y-аксонометрия, Z-аксонометрия;
метод А – X(ISO)-аксонометрия, Y(ISO)-аксонометрия, Z(ISO)-аксонометрия.
Кроме того, системы могут выводить промежуточные результаты проектирования на экран дисплея в изометрической или диметрической проекциях. Ниже показано расположение осей координат в прямоугольной изометрии для разновидностей метода Е (рис. 3) и разновидностей метода А (рис. 4).
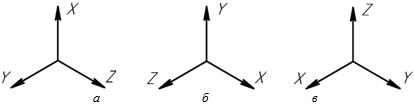
Рис. 3 – Разновидности метода Е
а – X-аксонометрия; б – Y-аксонометрия; в – Z-аксонометрия
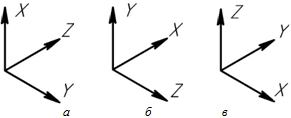
Рис. 4 – Разновидности метода А:
а – X(ISO)-аксонометрия; б – Y(ISO)-аксонометрия; в – Z(ISO)-аксонометрия
В таблице 1 приведено расположение основных видов для указанных разновидностей методов проецирования.
Начиная проектирование нового изделия, проектировщик может воспользоваться двумя существующими технологиями работы с предлагаемыми разновидностями методов изображения.
Таблица 1 – Расположение основных видов для разновидностей методов проецирования
| Метод проецирования | Разновидности метода | Стандартные виды | ||
| Спереди | Сверху | Слева | ||
| Е | X-аксонометрия | XZ | YZ | XY |
| Y-аксонометрия | XY | XZ | YZ | |
| Z-аксонометрия | YZ | XY | XZ | |
| A | X(ISO)-аксонометрия | XY | YZ | XZ |
| Y(ISO)-аксонометрия | YZ | XZ | XY | |
| Z(ISO)-аксонометрия | XZ | XY | YZ | |
Первая технология заключается в следующем. Проектировщик с учётом требований к конструкторской документации на проектируемое изделие, выбирает соответствующую разновидность метода проецирования и начинает моделирование деталей и сборочных единиц, входящих в изделие. При этом, выполняя формообразующие операции, проектировщик выбирает такое положение плоскостей и поверхностей для создания эскизов этих операций, которое обеспечит расположение изображений спроектированного изделия в соответствии с предъявленными требованиями к конструкторской документации.
При использовании второй технологии проектировщик выполняет моделирование деталей и сборочных единиц, входящих в изделие, выбирая ту разновидность метода проецирования, к которой он привык и в которой ему комфортней работать. И лишь оформляя необходимую конструкторскую документацию проектировщик решает вопросы расположения изображений изделия с учетом предъявляемых требований.
Ниже более подробно рассмотрим первую технологию работы и осветим вопросы влияния выбранного метода проецирования на положение плоскостей эскизов формообразующих операций.
Подавляющее большинство изделий машиностроительных предприятий в настоящее время проектируется с помощью систем твердотельного моделирования (solid modeling systems). Такие системы предназначены для работы с объектами, состоящими из замкнутого объема или монолита. Для создания объемных элементов используется либо объемные примитивы, имеющиеся в системе, либо перемещение плоских фигур (называемых эскизами) в пространстве. В процессе перемещения эти фигуры ограничивают часть пространства, которая и определяет форму создаваемого элемента. Процесс реализации функций моделирования объёмного тела называется формообразующей операцией. В современных системах твердотельного моделирования реализовано 10-15 различных формообразующих операций. Основными среди них являются операции «выдавливания» (заметания – sweeping). «вращения» (вращательного заметания – swinging), «кинематическая (по траектории)», «по сечениям» (skinning) [1, С. 119].
При выполнении чертежей спроектированного изделия необходимо, в первую очередь, определиться с главным изображением на рабочем или сборочном чертежах. На положение изделия на главном изображении чертежа влияют несколько факторов, основным из которых является требование обеспечить максимальную наглядность конструкции изделия. Кроме того, нужно учесть специфику изделия, а именно, определить к какой типовой группе относится данное изделие («тело вращения», «литая деталь» и другие) и учесть требования, рекомендованные для этой группы. Например, на главном изображении чертежа детали, относящейся к «телу вращения», ось вращения должна располагаться горизонтально. С учетом сказанного, можно рекомендовать при работе в различных разновидностях методов проецирования располагать плоскость эскиза формообразующих операций «выдавливание» и «вращение» («по сечениям») так, как указано в таблицах для деталей, имеющих форму «тело вращения» – таблица 2; призматическую – таблица 3.
Таблица 2 – Положение плоскости эскиза формообразующей операции для детали «тело вращения»
| Метод проецирования | Разновидности метода | Плоскость эскиза операций | |
| Выдавливание | Вращения | ||
| Е | X-аксонометрия | XY | XZ |
| Y-аксонометрия | YZ | XY | |
| Z-аксонометрия | XZ | YZ | |
| A | X(ISO)-аксонометрия | XZ | XY |
| Y(ISO)-аксонометрия | XY | YZ | |
| Z(ISO)-аксонометрия | YZ | XZ | |
Таблица 3 – Положение плоскости эскиза формообразующей операции для призматической детали
| Метод проецирования | Разновидности метода | Плоскость эскиза операций | |
| Выдавливание | По сечениям | ||
| Е | X-аксонометрия | YZ | XY |
| Y-аксонометрия | XZ | YZ | |
| Z-аксонометрия | XY | XZ | |
| A | X(ISO)-аксонометрия | YZ | XZ |
| Y(ISO)-аксонометрия | XZ | XY | |
| Z(ISO)-аксонометрия | XY | YZ | |
При следовании приведенным рекомендациям, после завершения моделирования изделия главное изображение будет являться видом спереди для всех указанных разновидностей метода проецирования.
Как известно [8, С. 614], в процессе твердотельного моделирования сборочных единиц способом восходящего проектирования в пространство сборки последовательно друг за другом добавляются твердотельные модели ранее созданных компонентов сборки. Местоположение добавляемых изделий определяется проектировщиком, а точное базирование присоединяемых компонентов обеспечивается системой геометрического моделирования за счет использования, так называемых, позиционирующих сопряжений объектов, накладывающих связи на компоненты сборки. Любое твердое тело в свободном состоянии обладает шестью степенями свободы (три координаты центра масс и три угла Эйлера, описывающих ориентацию тела) [9, С. 389], [10, С. 47]. Наложение связей приводит к уменьшению числа степеней свободы добавляемого компонента сборки. В системе КОМПАС реализованы следующие виды позиционирующих сопряжений: «совпадение», «соосность», «параллельность», «перпендикулярность», «на расстоянии», «под углом», «касание», «симметрия», «зависимое положение». Каждый вид сопряжения связывает различное число степеней свободы. В таблице 4 приведено число степеней свободы, которое связывается при выполнении основных видов сопряжений для различных геометрических элементов компонентов сборки.
Накладывать сопряжения на присоединяемые компоненты изделия необходимо с учетом структуры изделия и логики процесса сборки. Выбирая виды позиционирующих сопряжений нужно также учитывать число связываемых степеней свободы этими сопряжениями (см. таблицу 4), поскольку в итоге компонент считается собранным, если все его степени свободы окажутся связанными (принцип связанности степеней свободы соединяемых компонентов). Это утверждение справедливо для всех типов деталей, присоединяемых к собираемому изделию, но особенно наглядно оно проявляется для сложных криволинейных деталей, например, изготовленных из листового материала. На рисунке 5 показано аксонометрическое изображение твердотельной модели изделия «Корпус», состоящего из 13 листовых деталей. Эта модель была создана авторами статьи. Применение указанного принципа связности позволило оптимизировать построенную модель за счет использования наименьшего числа наложенных сопряжений.
Таблица 4 – Связываемое число степеней свободы различными видами сопряжений

Если в таких сложных случаях проектировщик будет назначать виды позиционирующих сопряжений без учета числа связываемых степеней свободы соединяемых компонентов, можно очень легко попасть в ситуацию, когда вновь устанавливаемые связи будут противоречить уже установленным (т.е. придут в рассогласование). И как следствие этого система проектирования выдаст ошибку без объяснения причин, которые привели к этой ошибке.
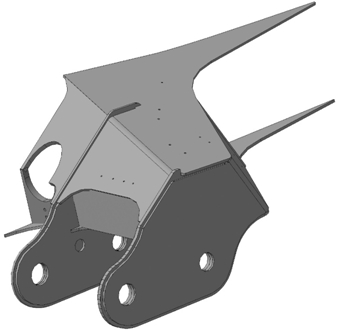
Рис. 5 – Твердотельная модель изделия «Корпус»
В тех случаях, когда сборка осуществляется из призматических деталей, конструкторские размерные базы которых совпадают (или параллельны) плоскостям систем координат сборки и компонента, вопросы рационального базирования компонентов сборки, как правило, решаются проектировщиком интуитивно. При этом бывает достаточно с помощью позиционирующих сопряжений наложить связи на 3-4 степени свободы присоединяемого компонента сборки и компонент может занять нужное положение. Чтобы оставшиеся степени свободы компонента при дальнейшей работе не привели к нарушению конструкции модели изделия, необходимо их зафиксировать в том состоянии, которое занимает компонент. В любой системе конструкторской графики есть команды, которые позволяют это сделать. Так в системе КОМПАС (17 версии) команда, выполняющая фиксацию компонентов, называется «Включить фиксацию».
Иногда в процессе сборки проектировщику бывает необходимо повторно применить вид позиционирующего сопряжения, которое уже использовалось. В таких случаях нужно иметь в виду, что общее число связываемых степеней свободы соединяемых компонентов не всегда является арифметической суммой чисел, указанных в таблице 4 для выбранного вида сопряжения, а может быть меньше. Это объясняется тем, что при повторном использовании сопряжения некоторые степени свободы также связываются повторно. Поясним сказанное на примере. Пусть необходимо собрать две детали – «Основание» (рис. 6) и «Планка» (рис. 7), расположив последнюю на верхней грани первой детали с обеспечением соосности двух отверстий.
Если применить сопряжение соосность для левых отверстий деталей (рис. 8), будет связано 4 степени свободы детали «Планка» (два угла и две координаты). Повторное применение сопряжения соосность для второй пары отверстий (рис. 9) позволит дополнительно связать лишь одну степень свободы – координату, т.к. три степени свободы (два угла и одна координата) связываются повторно (что объясняется параллельностью осей вращения пар отверстий). Поэтому для завершения сборки двух деталей нужно связать оставшуюся несвязанной одну координату. Для этого можно воспользоваться сопряжением «совпадение» (точка-плоскость или плоскость-плоскость). Результат показан на рисунке 10.
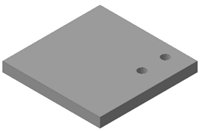
Рис. 6 – Твердотельная модель детали «Основание»

Рис. 7 – Твердотельная модель детали «Планка»
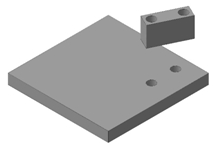
Рис.8 – Результат применения сопряжения «соосность»
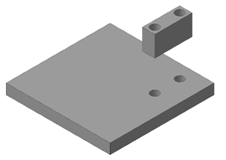
Рис. 9 – Повторное применение сопряжения «соосность»
Рис. 10 – Результат сборки
В завершение необходимо отметить, что решение вопросов точного базирования соединяемых компонентов сборки изделия способом восходящего проектирования можно упростить, если в сложных случаях выполнять указанную работу с учетом степеней свободы компонентов, которые связываются при наложении различных видов позиционирующих сопряжений. Рассмотренные в статье вопросы и предлагаемые пути их решения были апробированы авторами при выполнении лабораторного практикума по инженерной и компьютерной графике для бакалавров, обучающихся по направлениям укрупненной группы 150000 «Машиностроение».
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Ли К. Основы САПР (CAD/CAM/CAE).: Пер. с англ. / К. Ли. – СПб.: Питер. 2004. – 560 с.
- Стандарт СЭВ 362-76. Единая система конструкторской документации СЭВ. Проекция. Прямоугольное проецирование на несколько плоскостей проекций. – Введ. 1979–01–01. – М.: Издательство стандартов. 1976. – 6 с.
- ГОСТ 2.305-2008. Единая система конструкторской документации. Изображения – виды, разрезы, сечения. – М.: Стандартинформ. 2009. – 24 с. [Unified system of design documentation. Images – views, sections, sections, (in Rus-sian), Federal standard 2.305-2008, Moscow, Standatrinform, 2009.]
- ISO 5456-1:1996. Technical drawings Projection methods Part 1: Synopsis [Электронный ресурс]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-1:ed-1:v1:en
- ISO 5456-2:1996, Technical drawings — Projection methods — Part 2: Ortho-graphic representations [Электронный ресурс]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-2:ed-1:v1:en
- ISO 5456-3:1996, Technical drawings — Projection methods — Part 3: Axonometric representations [Электронный ресурс]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-3:ed-1:v1:en
- ISO 5456-4:1996, Technical drawings — Projection methods — Part 4: Central projection [Электронный ресурс]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-4:ed-1:v1:en
- Жарков Н. В. КОМПАС-3D. Полное руководство. От новичка до профессионала / Н.В.Жарков, М.А.Минеев, М.В.Финков и др. – СПб.: Наука и Техника, 2016. – 672 с. [N. V. Zharkov, M. A. Mineev, M. V. Tinkov, R. G. Prodi, KOMPAS-3D. Complete guide. From beginner to professional, (in Russian). Saint-Petersburg: Nauka i Tehnika, 2016.]
- Бать М. И. Теоретическая механика в примерах и задачах. Том 2: Динамика [Электронный ресурс]: учебное пособие / М.И. Бать, Г.Ю. Джанелидзе, А.С. Кельзон. — Санкт-Петербург: Лань, 2013. — 640 с. — URL: https://e.lanbook.com/book/4552.
- Никитин Н. Н. Курс теоретической механики [Электронный ресурс]: учебник / Н.Н. Никитин — Санкт-Петербург: Лань, 2011. — 720 с. — URL: https://e.lanbook.com/book/1807.
Список литературы на английском языке / References in English
- Lee K. Osnovyi SAPR (CAD/CAM/CAE). [Principles of CAD/CAM/CAE Systems] / K. Lee. – Saint-Petersburg: Peter, 2004. – 560 p. [in Russian]
- Standart SEV 362-76. Edinaya sistema konstruktorskoy dokumentatsii SEV. Proektsiya. Pryamougolnoe proetsirovanie na neskolko ploskostey proektsiy. [Unified system of design documentation of CMEA. Projection. A rectangular projection on multiple planes of projections], – Vved. 1979–01–01. M., Izd-vo Standartov, 1976. – 6 p. [in Russian]
- GOST 2.305-2008. Edinaya sistema konstruktorskoy dokumentatsii. Izobrazheniya – vidyi, razrezyi, secheniya. [Unified system of design documentation. Images – views, sections, sections], – Vved. 2009–07–01. M., Standartinform. 2009. – 24 p. [in Russian]
- ISO 5456-1:1996. Technical drawings Projection methods Part 1: Synopsis [Online]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-1:ed-1:v1:en
- ISO 5456-2:1996, Technical drawings — Projection methods — Part 2: Ortho-graphic representations [Online]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-2:ed-1:v1:en
- ISO 5456-3:1996, Technical drawings — Projection methods — Part 3: Axonometric representations [Online]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-3:ed-1:v1:en
- ISO 5456-4:1996, Technical drawings — Projection methods — Part 4: Central projection [Online]. URL: https://www.iso.org/obp/ui/#iso:std:iso:5456:-4:ed-1:v1:en
- Zharkov N. V. KOMPAS-3D. Polnoe rukovodstvo. Ot novichka do professionala. [KOMPAS-3D. Complete guide. From beginner to professional] / N. V. Zharkov, M. A. Mineev, M. V. Tinkov and others. – SPb.: Nauka i Tehnika, 2016. – 672 р.
- Bat M. I. Teoreticheskaya mehanika v primerah i zadachah. Tom 2: Dinamika [Theoretical mechanics in examples and problems: textbook: Vol. 2: Dynamics] [Elektronnyiy resurs] / M.I. Bat, G.Yu. Dzhanelidze, A.S. Kelzon. — Sankt-Peterburg: Lan, 2013. — 640 p. [in Russian] — URL: https://e.lanbook.com/book/4552.
- Nikitin N. N. Kurs teoreticheskoy mehaniki. [The course of theoretical mechanics] [Electronic resource] / N.N. Nikitin. — Sankt-Peterburg: Lan, 2011. — 720 p. — URL: https://e.lanbook.com/book/1807.