Создание универсальной модели В ПРОГРАММНОМ ПАКЕТЕ SIMULINK для АНАЛИЗа ПАРАМЕТРОВ типовых роботов-манипуляторов
Создание универсальной модели В ПРОГРАММНОМ ПАКЕТЕ SIMULINK для АНАЛИЗа ПАРАМЕТРОВ типовых роботов-манипуляторов
Аннотация
Смоделирован эксперимент с простейшим захватным механизмом робота-манипулятора в программном пакете Simulink. В ходе проведения эксперимента были получены графики с изменением координат положения захвата робота, проекций скоростей захвата робота на оси координат, угловых скоростей захвата манипулятора по осям координат, проекций ускорений захвата манипулятора на оси координат, угловых ускорений захвата манипулятора по осям координат. Получены данные по работе захвата манипулятора, проведен анализ графиков. Описаны изменения параметров робота-манипулятора с течением времени по трем осям координат. Была собрана блок-схема модели робота-манипулятора с захватом в программном пакете Simulink, а также описана задача каждого из блоков.
1. Введение
На протяжении веков человек создавал механизмы и машины, способные упростить нашу жизнь, и современному человеку без них трудно представить свою жизнь. Новые устройства будут появляться каждый день, а существующие будут становиться лучше. Уже существует огромное количество подобных устройств, но роботы, несомненно, являются самым важным достижением человеческих идей.
С формированием робототехники было выделено 3 типа роботов: использующие строгую программу действий; манипуляторы, управляемые оператором; с искусственным интеллектом (также известными как интегральные) они работают преднамеренно («разумно») без вмешательства человека. Самые современные роботы (абсолютно все 3 типа) – это роботы-манипуляторы.
Промышленные роботизированные манипуляторы включают в себя «механическую руку» (одну или несколько) и устройства дистанционного управления или интегрированного программного управления, менее часто используются электронные вычислительные машины (ЭВМ).
Манипулятор предназначен для замены человека, он представляет собой программируемое автоматическое устройство с рычажным механизмом и приводами, позволяет выполнять задачи, аналогичные работе человеческих рук, под управлением человека-оператора. При этом решаются важные социальные цели – отстранить человека от работы, в том числе физического труда и тяжелой работы, опасной для здоровья, от простых и монотонных действий, так или иначе не требующих материальной квалификации . Эластичное автоматическое производство, сформированное на базе промышленных роботов, может решить проблемы автоматизации предприятий с широким спектром продукции мелкого и частичного производства. Компьютерное моделирование концепций роботов играет очень важную роль в области науки и техники. Сегодня трудоемкий ручной труд человека был заменен многочисленными роботами, вычислительными устройствами и компьютерными математическими системами, которые значительно облегчают и сводят к минимуму вычисления и крупномасштабные преобразования , .
Важно отметить, что динамические характеристики манипулятора влияют на технические параметры, такие как: вес звеньев, мощность приводных двигателей, грузоподъемность захватного устройства и самого манипулятора в целом. Поэтому необходим их анализ и учет при дальнейших расчетах и выборе приводных устройств.
Данная тема весьма актуальна в наше время, так как автоматизация производств позволяет сократить непосредственное участие человека в технологическом процессе, тем самым уменьшить количество брака продуктов и травм сотрудников.
Цель работы – смоделировать эксперимент в программном пакете Simulink с получением данных по работе робота-манипулятора, для анализа данных и дальнейшего применения их на реальной модели.
2. Описание блок-схемы модели робота-манипулятора
В данной работе проводится моделирование робота-манипулятора с простейшим захватным механизмом.
Алгоритм проведения эксперимента следующий:
1. Соберем блок-схему модели робота-манипулятора с захватом;
2. Выполним настройку каждого блока;
3. Запустим симуляцию;
4. Откроем результаты в виртуальных осциллографах;
5. Проведем анализ полученных данных.
В программном пакете КОМПАС-3D разработана исследуемая модель робота-манипулятора (рис. 1).
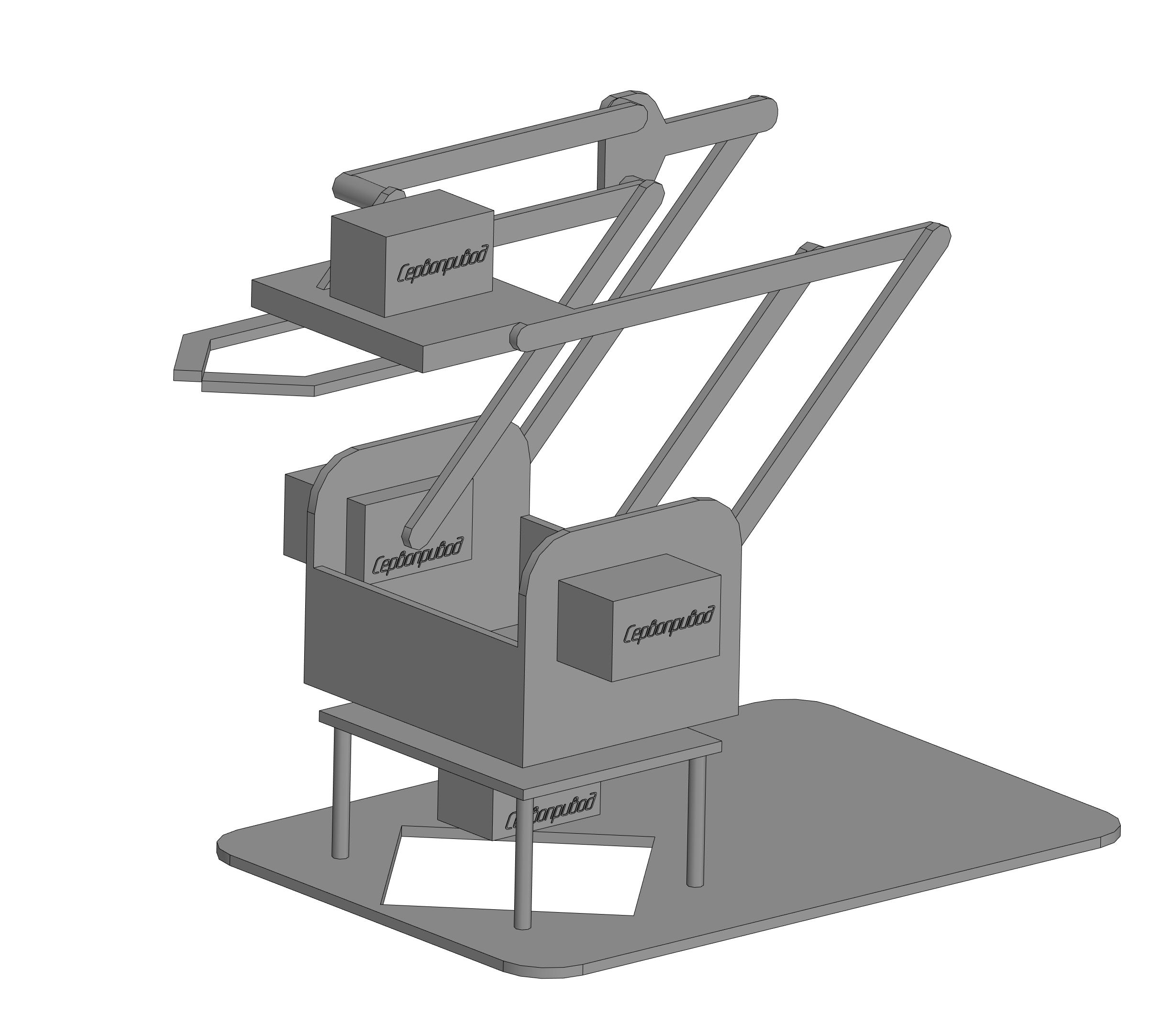
Рисунок 1 - 3D модель робота-манипулятора
Указанные параметры и характеристики являются исходными данными для моделирования в программном пакете Simulink.
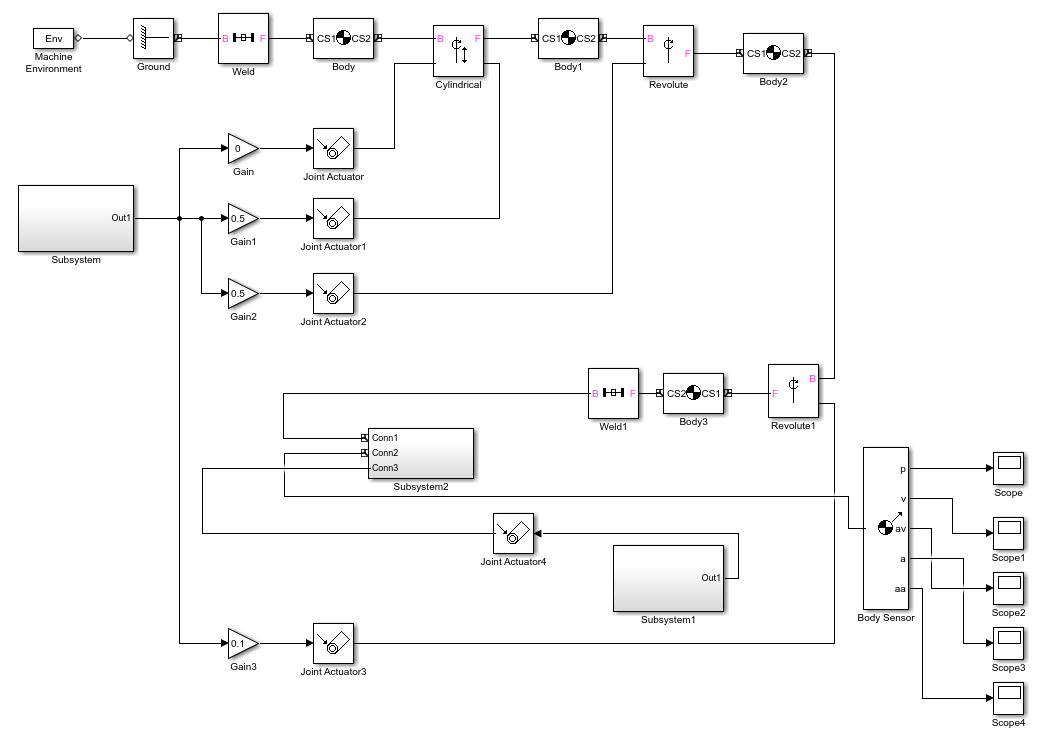
Рисунок 2 - Блок-схема модели робота-манипулятора с захватом
- блоки «Subsystem» и «Subsystem1» представляют собой систему, состоящую из блоков «Sine Wave» и «integrator», данные системы в совокупности с блоками «Gain» и «Joint Actuator» имитируют работу идеального двигателя;
- блок «Subsystem2» представляет собой систему, состоящую из блоков «Body», «Revolute» и «Gear Constraint», связанные между собой, они представляют захват робота-манипулятора;
- блок «MachineEnvironment» задает гравитационные силы и стойку;
- блоки «Body 0-3» определяют геометрию звеньев робота;
- блок «Weld» задает неразъемное соединение направляющей со стойкой;
- блок «Cylindrical» моделирует цилиндрическую кинематическую пару 4-го класса с поступательным и вращательным движением;
- блоки «Revolute 0-1» – вращательные кинематические пары 5-го класса, соединяющие звенья робота между собой;
- блоки «Body 4-6» моделируют звенья захвата;
- блоки «Revolute 2-3» определяют вращательные шарниры 5-го класса;
- блок «Gear Constraint» – дополнительная передача между губками захвата;
- блоки «Sine Wave 0-1» – синусоидальные законы движения;
- блоки «Joint Actuator 0-4» – двигатели с разными коэффициентами;
- блоки «Gain 0-3» – приводы губок захвата;
- блоки «Scope 0-1» – виртуальные осциллографы.
3. Анализ данных с виртуальных осциллографов
В ходе проведения эксперимента были получены графики с изменением координат положения захвата робота, проекций скоростей захвата робота на оси координат, угловых скоростей захвата манипулятора по осям координат, проекций ускорений захвата манипулятора на оси координат, угловых ускорений захвата манипулятора по осям координат (рис. 3, рис. 4, рис. 5, рис. 6 и рис. 7 соответственно) , .
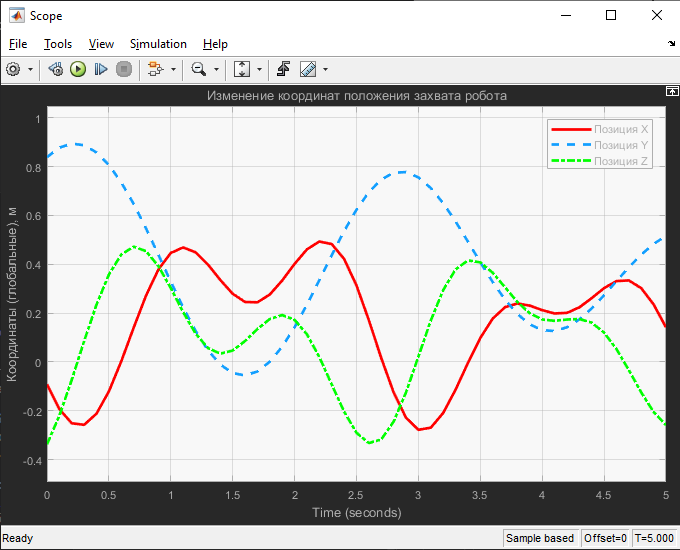
Рисунок 3 - Изменение координат положения захвата манипулятора
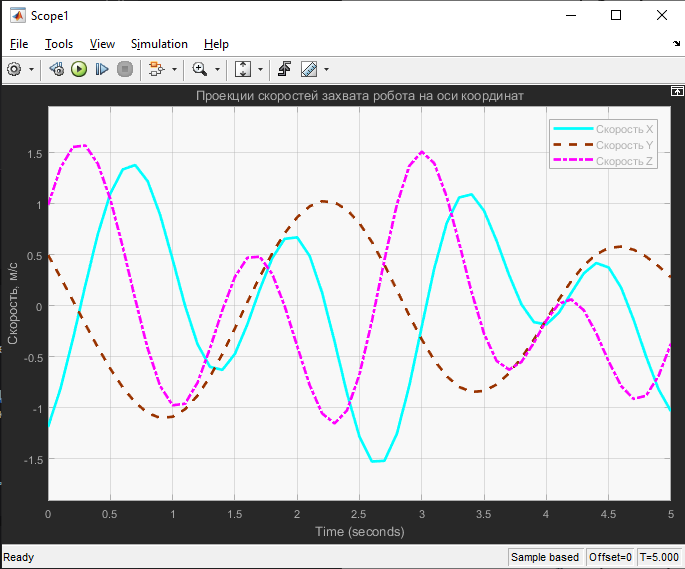
Рисунок 4 - Проекции скоростей захвата манипулятора на оси координат
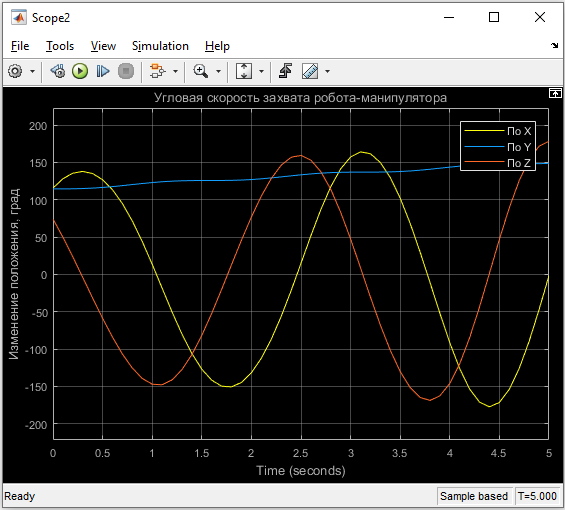
Рисунок 5 - Угловая скорость захвата манипулятора по осям координат
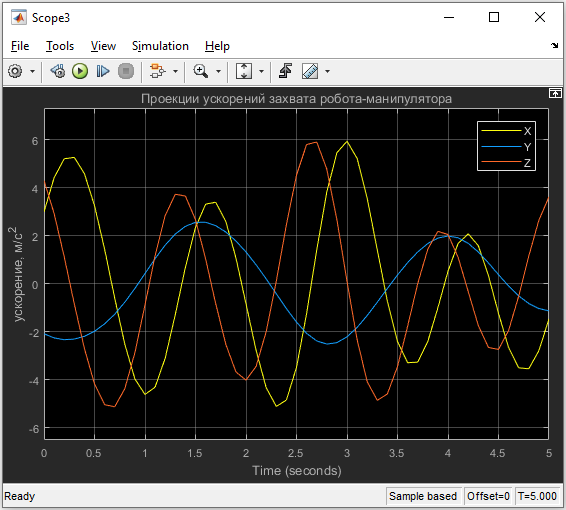
Рисунок 6 - Проекции ускорений захвата манипулятора на оси координат
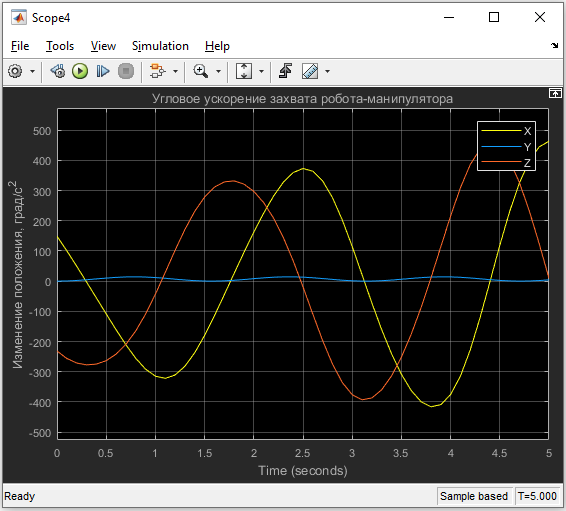
Рисунок 7 - Угловое ускорение захвата манипулятора по осям координат
Важной задачей является анализ и контроль характеристик функционирования робота-манипулятора, связанных с его динамикой. Изучение динамических процессов в приводных узлах манипулятора дает возможность определить динамические нагрузки, которые при перемещении звеньев кинематической цепи воздействуют на них. Все эти параметры при реализации движений робота-манипулятора позволяют выявить усилия в приводах, а также выполнить расчеты и выбрать нужные приводы.
4. Заключение
В соответствии с предполагаемым применением робота-манипулятора на производстве определено, что объем рабочего пространства для операций, выполняемых мобильными роботами составляет 10,00 м3 и выше. Вертикальные перемещения руки при использовании сферической системы координат находятся в пределах от 20° до 70°, что соответствует линейному смещению кисти от 45 до 1300 мм при самом большом вылете руки; горизонтальные перемещения руки обычно находятся в пределах от 50 до 1300 мм, а иногда доходят до 1700 мм или 2500 мм; поворотные перемещения в горизонтальной плоскости обычно находятся в пределах от 60° до 360°.
В результате работы была разработана блок-схема модели робота-манипулятора с захватом, она отражает все основные динамические свойства реального объекта, а также позволяет определять оптимальные значения для наилучшего режима работы робота-манипулятора. Помимо этого, получены данные по работе захвата манипулятора, проведен анализ графиков.
Полученная модель может быть усложнена для изучения и оценки динамических параметров подобных моделей, а результаты моделирования использованы при проектировании системы в части, касающейся габаритно-весовых параметров.
Конкретные характеристики двигателей и размеры звеньев для удовлетворения нуждам производства проектировщик может подбирать сам с учетом предложенной модели. Такой анализ в работе не проводился, это есть направление дальнейших исследований. В дальнейшей работе планируется также оценить грузоподъёмность, быстродействие, время реакции манипулятора на модели, макете и рекомендовать их для реальной модели.