Return to article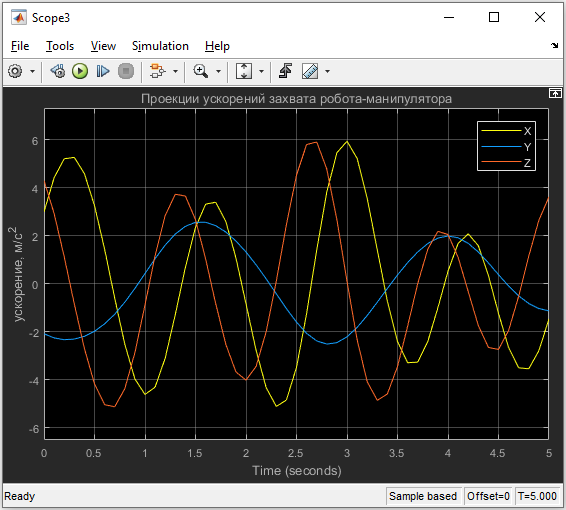
Создание универсальной модели В ПРОГРАММНОМ ПАКЕТЕ SIMULINK для АНАЛИЗа ПАРАМЕТРОВ типовых роботов-манипуляторов
Рисунок 1 - Проекции ускорений захвата манипулятора на оси координат
Рисунок 1 - Проекции ускорений захвата манипулятора на оси координат