КОНСТРУКЦИЯ МНОГООСЕВОГО УСТРОЙСТВА ТРЕХМЕРНОЙ ПЕЧАТИ, РАБОТАЮЩЕГО В ПОЛЯРНОЙ СИСТЕМЕ КООРДИНАТ И ВЫБОР ИНФОРМАЦИОННО УПРАВЛЯЮЩИХ ПРОГРАММ ДЛЯ ЕГО УПРАВЛЕНИЯ

КОНСТРУКЦИЯ МНОГООСЕВОГО УСТРОЙСТВА ТРЕХМЕРНОЙ ПЕЧАТИ, РАБОТАЮЩЕГО В ПОЛЯРНОЙ СИСТЕМЕ КООРДИНАТ И ВЫБОР ИНФОРМАЦИОННО УПРАВЛЯЮЩИХ ПРОГРАММ ДЛЯ ЕГО УПРАВЛЕНИЯ
Научная статья
Наумов И.И.1, Бурякова О.С.2 *, Маков С.В.3
2ORCID: 0000-0002-8798-5783,
1, 2, 3 Институт сферы обслуживания и предпринимательства (филиал) ДГТУ в г. Шахты, Шахты, Россия
*Корреспондирующий автор (buryakovaos[at]yandex.ru)
АннотацияВ данной статье рассматриваются основные моменты при проектировании пяти осевого устройства способного осуществлять послойную трехмерную печать путём наплавления пластика под разными углами наклона. Основной задачей в данной статье является разработка кинематической схемы устройства и его основных механических узлов и элементов. Описание принципов работы устройства и принципов планирования траекторий перемещений верхней подвижной части без учета вертикальной оси. В связи с тем, что в работе предлагается устройство, существенно отличающееся от существующих, то в работе приведены пути решения проблемы, связанные с применение программного продукта необходимого для управления и планирования траектории.
Ключевые слова: трехмерный принтер, пять степеней подвижности, механика устройства, позиционирование печатающей головки.
STRUCTURE OF MULTI-AXIS 3D PRINTING DEVICE WORKING IN POLAR COORDINATE SYSTEM AND SELECTION OF INFORMATION-MANAGING PROGRAMS FOR ITS CONTROLLING
Research Article
Naumov I.I.1, Buryakova O.S.2, Makov S.V.3
1ORCID: 20000-0002-8798-5783,
1, 2, 3 Institute of Service sector and Entrepreneurship (branch) of DSTU in Shakhty, Shakhty, Russia;
* Corresponding author (buryakovaos[at]yandex.ru)
AbstractThis paper discusses the main points in the design of five axial devices capable of layer-by-layer 3D printing by fusing plastic at different angles of inclination. The main goal of this work is to develop a kinematic diagram of such a device and its main mechanical components and elements. The authors describe the device operation principles and the principles of planning the trajectories of movement of the upper movable part without taking into account the vertical axis. Since the work offers the device, which differs significantly from the existing ones, the ways to solve the problems associated with the use of a software product necessary for controlling and planning the trajectory are also presented.
Keywords: 3D printer, five degrees of mobility, device mechanics, positioning of the print head
ВведениеРабочие 5-осевые фрезеры уже существуют. 5-осевые системы существуют трех основных конфигураций: стол/стол, головка/голова и стол/голова. В этом проекте было решено использовать конфигурацию стол/голова, основными причинами которой являются две дополнительные оси, которые будут иметь дополнительный вес. Это необходимо учитывать при выборе двигателей и проектировании силовой конструкции машины [4].
Для правильной работы системы головка/головка или головка/стол компоненты системы должны быть компактными. Это создает сложности при сборке и проектировании. В то время как система стол/стол может быть легко построена большего размера, поскольку вес компенсируется более сильными двигателями.
Одним из преимуществ системы головка/стол над системой стол/стол является то, что она может работать с более тяжелыми деталями. Эта система будет работать с пластиком, поэтому вес деталей при проектировании можно не учитывать.
Одной из проблем системы является крепление заготовки к рабочему столу. Это может быть проблемой при печати, так как адгезия с рабочим столом может быть недостаточная. После тестирования нескольких отпечатков на принтере было установлено, что такой проблемы не возникает. Так как пластик достаточно хорошо прилипал к рабочему столу, и после печати необходимо применять силу для удаления детали с рабочего стола [3].
Другая проблема, которая может возникнуть при конфигурации системы головка/головка и головка/стол, заключается в том, что пластик может не полностью соединяться или начинать стекать вниз по структуре при печати под различными углами, отличными от 90° по отношению к столу на котором производится печать. Хотя нет исследований, которые могут поддержать это утверждение, система стол/стол более подходит для применения в 5 ти осевой печати. В предлагаемом устройстве печатающая головка не изменяет своего наклона относительно поверхности, на которой располагается устройство, благодаря этому избегается стекание пластика мимо детали [7], [8].
Выбор начала координатной системы станка
В конфигурации Голова/Стол две поворотные оси будут часто пересекаться, поэтому наиболее удобным местом начала координат системы станков (MCS) будет в том месте, где вращающиеся оси пересекаются. Иллюстрацию точки пересечения в системе Голова/Стол можно увидеть на рисунке 1, где начало координатной системы находится в пересечении красных линий. Обоснованием того, что нулевая точка координат предлагаемого устройства находится в точке пересечений осей вращений, т.е. в центра рабочего стола является то, что это позволит облегчить как процесс печати так и создание управлявшей программы за счет того что.
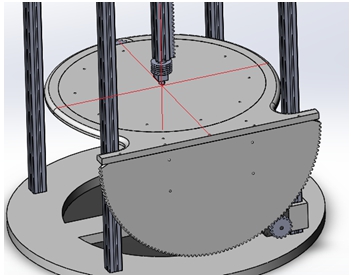
Рис. 1 – Расположение начала системы координат
Моделирование прототипа станка
Механизм устройства состоит из двух частей. В верхней части располагаются оси X, Y и Z, что видно на рисунке 2. В нижней части на стойке располагаются дополнительные поворотные оси A и C, что можно увидеть на рисунке 3. Так как начало координат станка расположено в центре пересечения осей нам необходимо иметь возможность перемещения либо рабочего стола, либо верхней подвижной части для осуществления калибровки печатающего устройства. Для калибровки был выбран метод перемещения верхней подвижной части, это осуществляется с помощью четырех подвижных пластин, изображенных на рисунке 4. Для передачи крутящего момента с двигателя на верхнюю часть используется ременной привод, со временем ремни имеют свойство растягиваться, поэтому предусматривается применение натягивающего ролика. Подробную схему расположения ремня можно рассмотреть на рисунке 5.
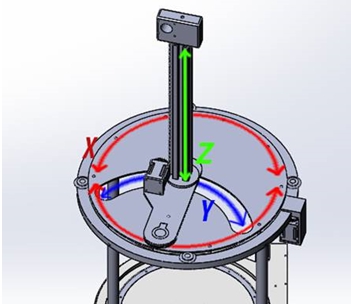
Рис. 2 – оси X, Y и Z станка
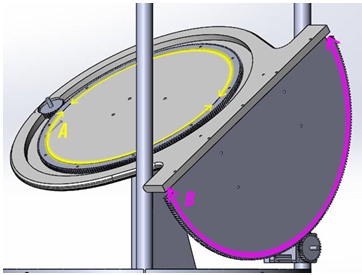
Рис. 3 – Оси A и С
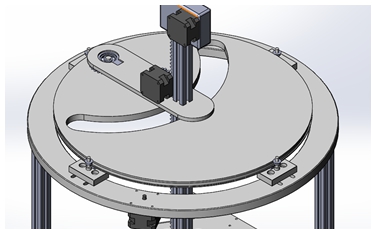
Рис. 4 – Калибровочные пластины
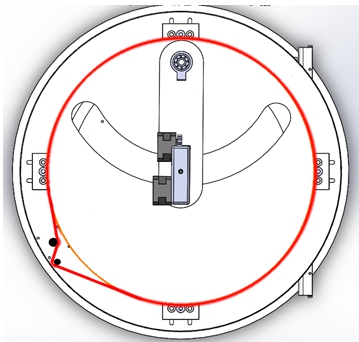
Рис. 5 – Схема ременного привода
Для перемещения верхней подвижной части вокруг своей оси была выбрана ременная передача. Ременная передача позволяет снизить люфт в поворотном механизме и более износоустойчива чем обычная шестеренчатая передача.
Для управления данным устройством предлагается рассмотреть верхний поворотный механизм как отдельный двухзвенный манипулятор, так как все перемещения в этом механизме являются нелинейными, и отделяем ось Z так как ее перемещения определяются одной линией и сложностей в вычислении ее траектории не будет.
Кинематическая схема устройства двухзвенного механизма состоит из двух ведущих звеньев равной длины, образующих открытую кинематическую цепь. На расчетной схеме, представленной на рисунке 6, начало системы координат ХОY совмещено с осью вращения первого звена. Второе звено закреплено на первом с возможностью вращения вокруг точки крепления H, расположенной на конце первого звена. В точке P(t), расположенной на внешнем диаметре второго звена установлен рабочий инструмент. Рабочая зона ограничена кругом радиуса R по конструктивным соображениям.
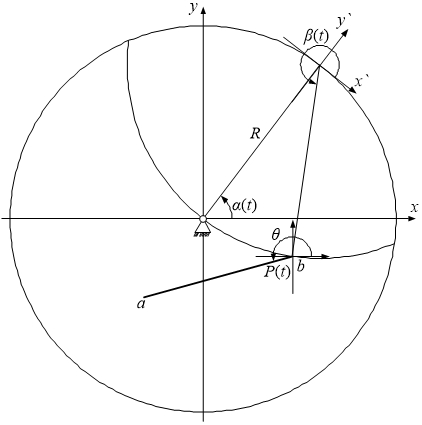
Рис. 6 – Кинематическая схема устройства
На рисунке 6 приняты следующие обозначения:
P(t) - рабочая точка с координатами x(t), y(t) в основной (неподвижной) системе координат xoy и x2(t), y2(t) в дополнительной системе координат x`y`;
α(t) - угол поворота диска относительно основной системы координат;
β(t) - угол поворота штанги относительно дополнительной системы координат;
a,b - концы отрезка ab, который должна проходить точка P(t);
θ - угол наклона отрезка ab;
R – радиус дисков.
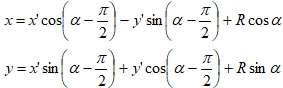
Поскольку исследуется кинематическая модель двухзвенного манипулятора в двумерной системе, то для определения положения звеньев целесообразно найти аналитические выражения, связывающие декартовы координаты рабочей точки с изменением полярных координат каждого звена [1], [6].
Так как звеньев в кинематической схеме два, то вместо матриц перехода от одного звена к другому целесообразнее воспользоваться тригонометрической записью. Запишем координаты рабочей точки P(t) относительно осей x`y`[2]:
![]() (1)
(1)
 (3)
или:
(3)
или:
Проведенный обзор рынка устройств трехмерной печати и исследовательских работ в этой области показал, что применение устройств трехмерной печати работающих в такой системе координат в настоящее время на рынке не представлено [9]. Поэтому применение готовых программных продуктов для управления устройств такого рода не существует. По этой причине для решение данной проблемы можно использовать либо системы управления фрезерными ЧПУ станками, после соответствующей доработки и оптимизации, либо разработать специализированный программный продукт с использованием предложенной в статье математики [5].
Заключение
В статье рассмотрен принцип трехмерной печати, основанный на оригинальной механической конструкции, отличающийся тем, что используется пять степеней свободы при печати. Использование такой конструкции позволяет избежать использования элементов поддержки, которые необходимы для стандартных устройств трехмерной печати и повысить производительность за счет отсутствия необходимости печати подложек. Также в статье рассмотрены основные отличия в управлении от существующих систем, принципы калибровки печатающей головки, которые необходимы в информационных системах, отличающийся от существующих.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Наумов И.И. Разработка переносного комплекса с поворотной платформой для контурной обработки стационарных поверхностей : автореф. дисс. … канд. технич. наук / И.И. Наумов. – ЮРГУЭС, Шахты. – 2011. – 20 с.
- Валюкевич Ю.А. Структура электромеханической части двухзвенного механизма как объекта регулирования следящей САР положения / Ю.А. Валюкевич,И.И. Наумов // Сервис в России и за рубежом – Издательство: Российский государственный университет туризма и сервиса. – 2011. – №5 (24). – С. 4–15.
- Ким В.С. Теория и практика экструзии полимеров / В.С. Ким – М.: КолосС. – 2005. – 568 с.
- Механика самодельного станка ЧПУ // RCdesign URL: http://www.rcdesign.ru/articles/tools/cnc_mechanics (дата обращения: 16.04.2020).
- Сосонкин В.Л. Системы числового программного управления / В.Л. Сосонкин, Г.М Мартинов. – Москва: Логос. – 2005. – 296 с.
- Валюкевич Ю.А. Кинематическая модель двухзвенного механизма на основе цифровых дифференциальных анализаторов и планирование траектории в прямоугольной системе координат / Ю.А. Валюкевич,И.И. Наумов // Электротехнические и информационные комплексы и системы. – 2011. – № 3. – Т. 7. – С. 3-9.
- Шишковский И.В. Основы аддитивных технологий высокого разрешения / И. В. Шишковский // СПб. – 2016 – 400 с.
- Каменев С.В. Технологии аддитивного производства: учебное пособие / С.В. Каменев, К.С. Романенко // Оренбургский государственный университет. – 2017. – 145 с.
- Безруков В.П. Анонсирование технических средств международной выставки потребительской техники / В.П. Безруков, О.С. Бурякова // Научная весна-2019: Экономические науки сборник научных трудов. Институт сферы обслуживания и предпринимательства (филиал) Донского государственного технического университета. – 2019. – С. 12-17.
- Безруков В.П. Возможности искусственного интеллекта при написании текстов / В.П. Безруков, О.С.Бурякова // Наука, технологии, техника: современные парадигмы и практические разработкисборник научных трудов по материалам I Международной научно-практической конференции. – 2019. – С. 36–39.
Список литературы на английском языке / References in English
- Naumov I.I. Razrabotka perenosnogo kompleksa s povorotnoj platformoj dlja konturnoj obrabotki stacionarnyh poverhnostej : avtoref. diss. … kand. tehnich. nauk [Development of a portable complex with a rotary platform for contour processing of stationary surfaces: abstract of the dissertation for the degree of candidate of technical Sciences] / I.I. Naumov. – JuRGUJeS, Shahty. – 2011. – 20 p. [in Russian]
- Valjukevich Ju.A. Struktura jelektromehanicheskoj chasti dvuhzvennogo mehanizma kak ob’ekta regulirovanija sledjashhej SAR polozhenija [Structure of Electromechanical part of the two-link mechanism as an object of regulation ATS servo position] / Ju.A. Valjukevich, I.I. Naumov // Servis v Rossii i za rubezhom [Service in Russia and abroad] – Izdatel'stvo: Rossijskij gosudarstvennyj universitet turizma i servisa. – 2011. – №5 (24). – P. 4–15. [in Russian]
- Kim V.S. Teorija i praktika jekstruzii polimerov [Theory and practice of polymer extrusion] / V.S. Kim – M.: KolosS. – 2005. – 568 p. [in Russian]
- Mehanika samodel'nogo stanka ChPU [Mechanics of a homemade CNC machine] // RCdesign URL: http://shhshhshh.rcdesign.ru/articles/tools/cnc_mechanics (data obrashhenija: 16.04.2020). [in Russian]
- Sosonkin V.L. Sistemy chislovogo programmnogo upravlenija [Systems of numerical software control] / V.L. Sosonkin, G.M Martinov. – Moskva: Logos. – 2005. – 296 p. [in Russian]
- Valjukevich Ju.A. Kinematicheskaja model' dvuhzvennogo mehanizma na osnove cifrovyh differencial'nyh analizatorov i planirovanie traektorii v prjamougol'noj sisteme koordinat [Kinematic model of a two-link mechanism based on digital differential analyzers and trajectory planning in a rectangular coordinate system] / Ju.A. Valjukevich, I.I. Naumov // Jelektrotehnicheskie i informacionnye kompleksy i sistemy [Electrotechnical and information complexes and systems]. – 2011. – № 3. – V. 7. – P. 3–9. [in Russian]
- Shishkovskij I.V. Osnovy additivnyh tehnologij vysokogo razreshenija [Fundamentals of additive technologies of high resolution] / I. V. Shishkovskij // SPb. – 2016 – 400 p. [in Russian]
- Kamenev S.V. Tehnologii additivnogo proizvodstva: uchebnoe posobie [Technologies of additive manufacturing: textbook] / S.V. Kamenev, K.S. Romanenko // Orenburgskij gosudarstvennyj universitet [Orenburg state University]. – 2017. – 145 p. [in Russian]
- Bezrukov V.P. Anonsirovanie tehnicheskih sredstv mezhdunarodnoj vystavki potrebitel'skoj tehniki [Announcing technical means of the international exhibition of consumer equipment] / V.P. Bezrukov, O.S. Burjakova // Nauchnaja vesna-2019: Jekonomicheskie nauki sbornik nauchnyh trudov. Institut sfery obsluzhivanija i predprinimatel'stva (filial) Donskogo gosudarstvennogo tehnicheskogo universiteta [Scientific spring-2019: Economic Sciences collection of scientific papers. Institute of service and entrepreneurship (branch) Don state technical University]. – 2019. – P. 12-17. [in Russian]
- Bezrukov V.P. Vozmozhnosti iskusstvennogo intellekta pri napisanii tekstov [The possibilities of artificial intelligence in writing texts] / V.P. Bezrukov, O.S. Burjakova // Nauka, tehnologii, tehnika: sovremennye paradigmy i prakticheskie razrabotki sbornik nauchnyh trudov po materialam I Mezhdunarodnoj nauchno-prakticheskoj konferencii [Science, technology, engineering: modern paradigms and practical developments collection of scientific papers on the materials of the I International scientific and practical conference]. – 2019. – P. 36–39. [in Russian]