СОСТАВЛЕНИЕ ДИНАМИЧЕСКИХ МОДЕЛЕЙ АНТЕННОГО ПАРАБОЛИЧЕСКОГО УСТРОЙСТВА ДЛЯ ПОСЛЕДУЮЩЕГО РАСЧЕТА ЕГО ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК

Богорад М.С.
Магистрант, Политехнический институт Сибирского Федерального Университета
СОСТАВЛЕНИЕ ДИНАМИЧЕСКИХ МОДЕЛЕЙ АНТЕННОГО ПАРАБОЛИЧЕСКОГО УСТРОЙСТВА ДЛЯ ПОСЛЕДУЮЩЕГО РАСЧЕТА ЕГО ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Аннотация
В статье рассмотрено составление динамических моделей, которые представляют механизм антенного устройства в качестве двухмассовой системы.
Ключевые слова: динамика, динамические модели, антенное устройство.
Bogorad M.S.
Master student, Politechnical Institute of the Siberian Federal Univetsity
FORMATION OF THE DYNAMIC MODELS OF THE ANTENNA PARABOLIC UNIT FOR THE CALCULATION OF THE DYNAMIC CHARACTERISTICS
Abstract
Article considerscompilation of dynamic models that represent the mechanism of the antenna device as a two-mass system.
Keywords: dynamics, dynamic models, the antenna device.
Механизм антенного устройства имеет две кинематические степени свободы, одна из которых представляет собой угловые перемещения в плоскости, соотносимой с плоскостью земной поверхности, а вторая – перемещения в плоскости, нормальной к земной поверхности.
Для анализа динамического поведения устройства при внешних возмущающих воздействиях необходимо создать его динамическую модель, определить параметры модели, решить и выполнить анализ системы дифференциальных уравнений движения. В качестве глобальной системы координат берем систему координат, в которой ось Z нормальна к земной поверхности и представляет собой центр вращательного движения антенного устройства при наведении в горизонтальном направлении, плоскость XY располагается параллельно земной поверхности, ось Y параллельна оси вращения антенной головки, а ось X направлена в сторону зеркала антенны (Рисунок 1).
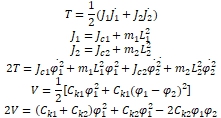
После дифференцирования (метод Вульфсона) замещаем матрицы
![]()
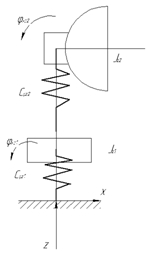
Рис. 1 – динамическая модель крутильных колебаний вокруг оси Z
Для решения данной системы уравнений необходимы входные данные в виде массово-инерционных характеристик отдельных элементов системы и упругих связей между ними. Моменты инерции определяются исследованием модели в программе Solid Works. Для расчета собственных частот необходимо определить жесткости связей системы.
Динамические параметры (моменты инерции) были получены из модели с использованием программы Solid Works.

Крутильная жесткость привода наведения по горизонту относительно оси Z
Для того чтобы найти крутильную жесткость системы вдоль оси Z, создается симуляция нагружения кронштейна в системе COSMOSWorks.
Схема нагружения кронштейна представлена на рисунке 2
Приложение нагрузок
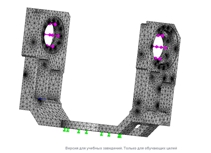
Рис. 2 - нагружение кронштейна при измерении деформаций вокруг оси Z
Перемещения в точке соединения с антенной головкой представлены на рис 3.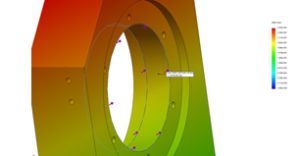
Рис. 3 – Величина перемещений
Находим угол смещения от крутящего момента 100 Н*м:
Зная угол смещения, находим жесткость системы поворота кронштейна вокруг оси Z
![]()
Жесткость вала привода наведения по азимуту
Для нахождения суммарной жесткости трех подшипников, поддерживающих антенную головку, составляется следующая схема (рисунок 4):
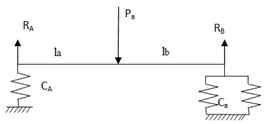
Рис. 4 – Схема нагрузки на подшипники
Необходимо определить величину деформации, возникающей в центре масс при приложенной нагрузке Pв. Расстояние между опорами
В результате исследования конструкции антенного устройства были разработаны две динамические расчетные схемы, позволяющие рассматривать колебания по шести обобщенным координатам. Подобно представленным выше расчетам ведется расчет жесткостей элементов.