СХЕМНОЕ РЕШЕНИЕ МЕХАНИЗМА ШЕСТИКООРДИНАТНОГО МАНИПУЛЯТОРА

Балакин П.Д.,1 Шамутдинов А.Х. 2
1 Доктор технических наук, профессор, заведующий кафедрой ТММ; 2 старший преподаватель кафедры ТММ.
Омский государственный технический университет
СХЕМНОЕ РЕШЕНИЕ МЕХАНИЗМА ШЕСТИКООРДИНАТНОГО МАНИПУЛЯТОРА
Аннотация
Предложено схемное решение механизма манипулятора с шестью степенями подвижности, включая независимость последовательности их исполнения с целью упрощения системы управления исполнительным движением. При унификации одно поступательное движение достигается сложением двух встречных вращений. Найдены кинематические соотношения унифицированного привода.
Ключевые слова: манипулятор, подвижность, приводы парциальных движений, угол поворота, угловая скорость.
Balakin P.D.,1 A.H. Shamutdinov2
SCHEMATIC OF THE MECHANISM MANIPULATOR OF SIX-DEGREE OF FREEDOM
Abstract
Schematic of the proposed mechanism of the robot arm with six degrees of freedom, including the independence of the sequence of their execution in order to facilitate the movement of the executive management. When unification one forward motion is achieved by adding the two counter-rotating. Found kinematic relations standardized the drive.
Keywords: manipulator, mobility, driving the partial movements, rotation angle, angular rate.
1. Актуальность задачи
Как известно [1−3] для автоматизации отдельных технологических операций, расширению возможностей технологического оборудования, для создания тренажеров и др. широко используют механизмы пространственных манипуляторов с развитой системой приводов, совокупное действие которых позволяет реализовать любое пространственное движение исполнительного органа в пространственной зоне обслуживания. В последнее время подобные манипуляторы имеют цифровую систему управления исполнительныным движением, что позволяет получить любой вид движения и изменять его характеристики. Однако сложность системы управления в значительной мере зависит от схемного решения манипулятора, поскольку парциальные движения от отдельных приводов являются связанными.
В этой связи задача поиска схемного решения пространственного манипулятора общего вида с независимыми парциальными движениями, включая независимость последовательности их исполнения с целью упрощения системы управления исполнительным движением, является актуальной.
2. Пространственный механизм
Предлагается схемное решение механизма в виде шестикоординатного манипулятора (рис. 1). Позиции на рис. 1.: 1-установочное звено (рабочий стол); 2-опорно-поворотное устройство; 3-наклонная платформа; 4, 12, 13- приводы поступательного перемещения, как правило, гидро- и электромеханические двигатели (шарико-винтовая пара); 5, 10, 11- электромеханические двигатели поступательных движений и вращения поворотного стола 6; 7-поперечная каретка; 8-продольная каретка; 9-станина (основание). Подвижность механизма определим по формуле Сомова-Малышева [4]:
W = 6n − 5p5 − 4p4 − 3p3 − 2p2 − p1, (1)
где n-число подвижных звеньев,
pi − число кинематических соответственно i-го класса.
Из рис.1 видно, что n = 6, p5 = 6, p4=p3=p2=p1=0. Тогда подвижность механизма по формуле (1) будет:
W=6∙6 − 5∙6 = 6
Установочное звено 1 способно иметь шесть независимых движений: три поступательных вдоль осей X, Y, Z и три вращения вокруг этих осей.
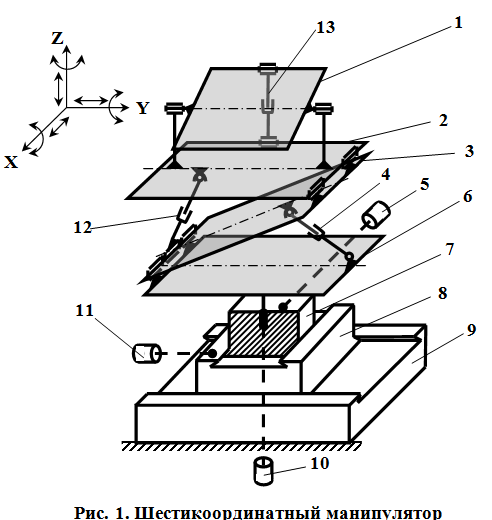
Особенностью схемного решения является достижение поступательного движения по оси Z путем сложения двух встречных вращений звеньев 2 и 3 [5] тогда как раздельное угловое движение этих звеньев приводит к вращению исполнительного органа вокруг оси X.
Реализация других парциальных движений не имеет особенностей и ясна из рис. 1. Отметим, что электромеханические приводы 4, 12, 13 могут иметь различное конструктивное исполнение и преобразование движения в них целиком определяется кинематической схемой привода.
3. Элементы кинематики приводов поступательного перемещения предложенного механизма
При унификации всех приводов поступательного перемещения, расчетная схема кинематических характеристик преобразования движения сводится к моделированию соотношений в изменяемом «треугольнике», одна сторона которого изменяет свой размер и конструктивно исполнена, например, гидроцилиндром со штоком (рис. 2). Интерес представляют две характеристики движения, а именно:
1) Изменение α и  при l=var, причем
при l=var, причем  ;
;
2) изменение z и  при сложении двух встречных вращений при , где α и − соответственно угол поворота, и скорость изменения этого угла во времени рабочего стола 1, l − длина штока 10, z и − соответственно вертикальная координата точки К платформы b и скорость изменения этой точки.
при сложении двух встречных вращений при , где α и − соответственно угол поворота, и скорость изменения этого угла во времени рабочего стола 1, l − длина штока 10, z и − соответственно вертикальная координата точки К платформы b и скорость изменения этой точки.
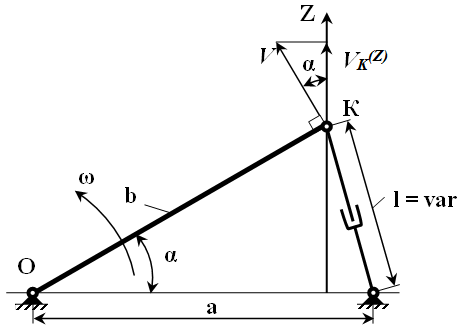
Рис. 2. Расчетная схема изменяемого треугольника механизма при l = var
Из рис. 2 по известной теореме имеем:
l2 = a2 + b2 − 2a∙b∙cosα,
откуда  (2)
(2)
при этом a = const, b = const.
Полагая, что l = V∙t, т.е. изменение суммарной длины l штока с гидроцилиндром происходит с постоянной скоростью, т.е. V = const, выражение (2) запишется: 
или в обобщенной форме α = arcos(m − n∙t2), (3)
где 
Выбирая конструктивно параметры так, что a = b выражение (3) преобразуется:
α(n, t) = arccos(1 - n∙t2) (4)
Обозначим  − угловая скорость движения рабочего сола 1 (рис. 1 или ОК на рис. 2). Тогда VK = ω∙OK = ω∙b − линейная скорость точки К платформы 1 и VK(Z) = ω∙b∙cosα − вертикальная скорость поступательного движения исполнительного звена 1 при одновременном вращении опорно-поворотного устройства 2 и наклонной платформы 3, имеющих совпадающие линейные размеры и одинаковые режимы работ гидродвигателей 4 и 12.
− угловая скорость движения рабочего сола 1 (рис. 1 или ОК на рис. 2). Тогда VK = ω∙OK = ω∙b − линейная скорость точки К платформы 1 и VK(Z) = ω∙b∙cosα − вертикальная скорость поступательного движения исполнительного звена 1 при одновременном вращении опорно-поворотного устройства 2 и наклонной платформы 3, имеющих совпадающие линейные размеры и одинаковые режимы работ гидродвигателей 4 и 12.
Дифференцируя выражение (4) по времени t найдём:
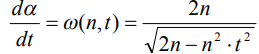 (5)
(5)
Используя пакет программы MathCAD 15, приводим зависимости выражений (4) и (5), которые представлены на рис. 3 и рис. 4.
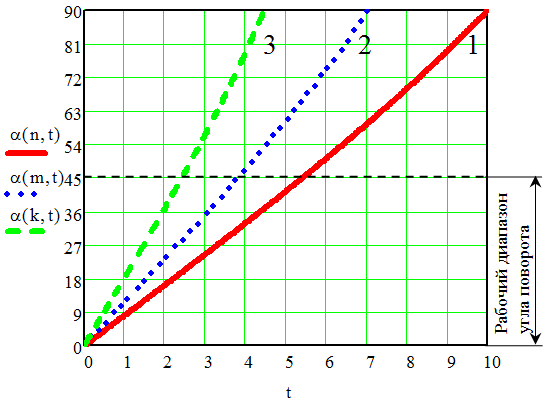
Рис. 3. Зависимость угла поворота платформы от времени: кривая 1 при n=0.01 сек-2, кривая 2 при n=0.02 сек-2, кривая 3 при n=0.05 сек-2
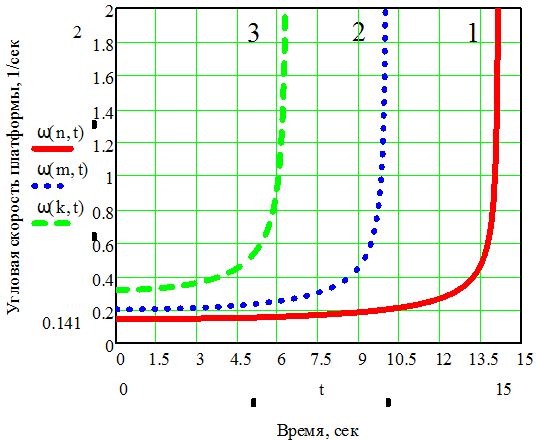
Рис. 4. Зависимость угловой скорости платформы от времени: кривая 1 при n=0.01 сек-2, кривая 2 при n=0.02 сек-2, кривая 3 при n=0.05 сек-2
Анализируя эти графики, в зависимости от параметра n видно, что:
- с увеличением n, а, следовательно, с увеличением скорости V поворот платформы осуществляется быстрее;
- зависимость α(n, t) = arccos(1 - n∙t2) при n = 0,01 − 0,05 сек-2 и t≤5 сек, практически линейна;
- в рабочем диапазоне α = 0° − 45° изменение угла движения рабочего стола 1 изменяется незначительно.
Выводы:
- Предлагаемое схемное решение механизма пространственного манипулятора расширяет функциональные возможности устройства манипулирования в пространстве, за счет обеспечения степени подвижности по шести координатам на базе кинематической развязки;
- Схемное решение обеспечивает независимость исполнительных движений, в том числе независимость последовательности исполнительных парциальных движений.
- При постоянной скорости перемещения штоков гидродвигателей угол поворота рабочего стола, в рабочем диапазоне, изменяется во времени практически линейно, т.е. угловая скорость рабочего стола практически постоянна.
Список литературы
Манипуляционные системы роботов / А. И. Корендясев [и др.] ; под общ. ред. А. И. Корендясева. – М. : Машиностроение, 1989. – С. 472.
Глазунов, В. А. Пространственные механизмы параллельной структуры / В. А. Глазунов, А. Ш. Колискор, А. Ф. Крайнев. − М. : Наука, 1991. − С. 95.
Альван, Х. М. Об управлении движением пространственной платформы с несколькими степенями подвижности / Х. М. Альван, А. В. Слоущ // Теория механизмов и машин. − СПб. : Изд. СПбГУ. 2003. – № 1. − С. 63–69.
Артоболевский, И. И. Теория механизмов и машин / И. И. Артоболевский. − М. : Наука, 1975. – С. 638.
Люкшин, В. С. Теория винтовых поверхностей в проектировании режущих инструментов / В. С. Люкшин. − М. : Машиностроение, 1967. − С. 372.
Список литературы
Манипуляционные системы роботов / А. И. Корендясев [и др.] ; под общ. ред. А. И. Корендясева. – М. : Машиностроение, 1989. – С. 472.
Глазунов, В. А. Пространственные механизмы параллельной структуры / В. А. Глазунов, А. Ш. Колискор, А. Ф. Крайнев. − М. : Наука, 1991. − С. 95.
Альван, Х. М. Об управлении движением пространственной платформы с несколькими степенями подвижности / Х. М. Альван, А. В. Слоущ // Теория механизмов и машин. − СПб. : Изд. СПбГУ. 2003. – № 1. − С. 63–69.
Артоболевский, И. И. Теория механизмов и машин / И. И. Артоболевский. − М. : Наука, 1975. – С. 638.
Люкшин, В. С. Теория винтовых поверхностей в проектировании режущих инструментов / В. С. Люкшин. − М. : Машиностроение, 1967. − С. 372.