СОЗДАНИЕ РОБОТИЗИРОВАННЫХ УСТРОЙСТВ, МОДЕЛИРУЮЩИХ ФУНКЦИОНИРОВАНИЕ РЕАЛЬНЫХ ОБЪЕКТОВ

DOI: https://doi.org/10.23670/IRJ.2022.120.6.010
СОЗДАНИЕ РОБОТИЗИРОВАННЫХ УСТРОЙСТВ, МОДЕЛИРУЮЩИХ ФУНКЦИОНИРОВАНИЕ РЕАЛЬНЫХ ОБЪЕКТОВ
Научная статья
1 Кузбасский государственный технический университет им. Т.Ф. Горбачева, Кемерово, Россия;
2 Чунцинский университет искусств и наук, Чунцин, Китай
* Корреспондирующий автор (korotkov.a.n.[at]mail.ru)
Аннотация
В представленной работе описаны процессы разработки и изготовления моделей реальных объектов в виде действующей модели шахтного копра и модели искусственной мышцы «McKibben». Создание модели шахтного копра осуществлялось с использованием программ «FUSION 360», «INVENTOR», «POWERMILL», «КОМПАС-3D» и станка с ЧПУ модели DMGMORISEIKINMV 5000 DCG. В качестве инструментов для изготовления деталей шахтного копра использовались твердосплавные концевые фрезы, сверла и метчики. Расчет режимов резания осуществлялся с использованием программы «POWERMILL». Обработка деталей велась с использованием смазочно-охлаждающей жидкости марки «Blasocut 4000 CF» швейцарского производителя «BlaserSwisslubeAG». Роботизированная модель шахтного копра работает в автоматическом цикле с подъемом и опусканием двух шахтных клетей, с находящимися в них фигурками шахтеров, у которых загораются по определенной схеме фонари в их касках. Автоматическое перемещение клетей сопровождается звуковым эффектом в виде гимна университета, в котором спроектирована и изготовлена модель шахтного копра.
Модели тех или иных органов человека в виде роботизированных протезов и их элементов получают все более широкое распространение в медицинской практике. К таким устройствам относится модель искусственной мышцы «McKibben» и вращающийся сустав на ее основе, перспективы разработки и применения которых оцениваются в данной работе.
Общим в представленных моделях шахтного копра и искусственной мышцы «McKibben» является процесс создания роботизированных устройств, моделирующих реальные объекты и имеющих ряд одинаковых технических подходов и решений.
Ключевые слова: модель шахтного копра, пневматическая искусственная мышца, вращающийся сустав, станок с ЧПУ, программы «FUSION 360», «КОМПАС-3D», «PowerMILL».
CREATION OF ROBOTIC DEVICES SIMULATING THE FUNCTIONING OF REAL OBJECTS Research article
Korotkov A.N.1, *, An Chao2
1 T.F. Gorbachev Kuzbass State Technical University, Kemerovo, Russia;
2 Chongqing University of Arts and Sciences, Chongqing, China
* Corresponding author (korotkov.a.n.[at]mail.ru)
Abstract
The presented work describes the processes of development and manufacture of models of real objects in the form of a working model of mining copra and artificial muscle «McKibben». The mining copra model was created with the software of «FUSION 360», «INVENTOR», «POWERMILL», «COMPASS-3D» and CNC machine DMG MORI SEIKI NMV 5000 DCG. Carbide end-milling cutter, twist drills and cutting taps were used as tools for manufacture of mining copra parts. The calculation of cutting modes was made in the «POWERMILL» program. The part processes was carried out with «Blasocut 4000 CF» cutting emulsion of the Swiss manufacturer «Blaser Swisslube AG». The robotic model of a mine copra operates in an automatic cycle with lifting and lowering of two shaft cages, with figurines of miners inside, which light up according to a certain lantern schemes in their helmets. The automatic movement of the cages is accompanied by a sound effect in the form of the university anthem, where the model of mine copra was designed and manufactured.
Models of human organs in the form of robotic prostheses and their components are becoming increasingly common in medical practice. Such devices include a model of artificial muscle «McKibben» and rotating joint on its basis, prospects of development and application of which are estimated in this work.
The presented models of mine copra and artificial muscle «McKibben» have in the common the process of creating robotic devices that simulate real objects and have a number of similar technical approaches and solutions.
Keywords: model of mining copra, pneumatic artificial muscle, rotating joint, CNC processing unit, programs «FUSION 360», «KOMPAS-3D», «PowerMILL».
Введение
В ряде случаев представляется полезным моделировать работу тех или иных объектов для прогнозирования их поведения в различных ситуациях, для реализации демонстрационных задач, а также в медицинских целях для воспроизведения функционирования тех или иных органов. В этом контексте выполнена работа, направленная на создание модели шахтного копра, (наземной части шахтного сооружения [1], [2]) уменьшенная в 150 раз и сделана оценка перспектив разработки и применения вращающегося сустава на основе искусственной пневматической мышцы «McKibben» [8].
Использование подхода, основанного на моделировании объектов, позволяет проводить анализ эффективности использования моделируемых конструкций при их реальной визуализации. В этом случае становится также возможным оптимизировать затраты на изготовление проектируемых объектов еще на этапе технологической подготовки производства.
Основная часть
Модель шахтного копра действующая – в ней поднимаются и опускаются две шахтные клети, в которых располагаются фигурки шахтеров в защитных касках с включенными шахтными фонарями. Копер имеет стандартное освещение для сооружений большой высотности – т.е. красные светодиоды на наиболее высоких элементах копра. Внешний вид модели шахтного копра изображен на рис. 1.
Все детали шахтного копра (кроме стандартных, типа электродвигателей, микросхем и др.) изготавливались из сплава Д16 на станке с ЧПУ [3] модели DMGMORISEIKINMV 5000 DCG.

Рис. 1 – Внешний вид модели шахтного копра
Модель шахтного копра состоит из 27 отдельных деталей, форма и размеры которых проектировалась с помощью программного обеспечения: «FUSION 360» [4], «INVENTOR» [5], «PowerMILL» [6], «КОМПАС-3D» [7].
Программа «FUSION 360» – это удобный твердотельный редактор, который позволяет работать с поверхностями, с сеткой, с листовым металлом. Дает возможность комплектовать сборочные единицы из различных компонентов.
Готовую модель можно графически обработать, чтобы получить реалистичный вид. Можно также сделать анимационный фильм, вывести модель на чертеж и подготовить всю необходимую конструкторскую документацию.
Программное обеспечение «INVENTOR» специально создавалось для решения задач, связанных с машиностроительной отраслью. Имеет возможность работать с трехмерными объектами будущих изделий, позволяет сформировать требуемую деталь и увидеть, как она будет выглядеть в действительности. В этом участвует 3D – графика и визуализация. Программа имеет обширный набор сведений о различных материалах (стали, пластики, дерево, резина и др.) а также может автоматически рассчитать и определять вес, когда важно знать вес готового устройства или механизма. Из отдельных деталей можно собрать механизм, в программе это именуется – «сборка», а в сборке можно назначить порядок соединения деталей, которые будут перемещаться и соединятся друг с другом. Таким образом, можно наблюдать за тем, как будет работать собранный механизм.
Программа также позволяет разрабатывать чертежи и другую документацию.
Программа «PowerMILL» позволяет разрабатывать управляющие программы для многоосевой высокопроизводительной механической обработки сложных изделий на станке с ЧПУ. С помощью программы можно также вести обработку плоских поверхностей, снимать фаски, формировать скругления и осуществлять сверление. Причем, при сверлении отверстий система автоматически определяет диаметр отверстий, глубину и их расположение. При обработке отверстий большего диаметра «PowerMILL» позволяет заменить процесс сверления фрезерованием отверстий по спиральной траектории. Кроме того, программа «PowerMILL» позволяет рассчитывать режимы резания для обработки заготовок.
Программное обеспечение «КОМПАС-3D» позволяет строить трехмерные объёмные твердые тела. Например, для построения 3D-модели такой детали, как цилиндр требуется нарисовать эскиз в одной из 3-х плоскостей. Далее пользуются командой «элемент выдавливания» путем выбора, какой эскиз нужно «выдавить», задать необходимые параметры и завершить операцию. Программа в автоматическом режиме произведет расчеты и построит трехмерный твердый объект в рабочем пространстве.
На рис. 2 изображен внешний вид станка с ЧПУ модели DMGMORISEIKINMV 5000 DCG, на котором изготавливались детали шахтного копра с помощью программного обеспечения, описанного выше.

Рис. 2 – Внешний вид станка с ЧПУ модели DMGMORISEIKINMV 5000 DCG: 1 – магазин инструментов; 2 – инструмент (фреза) в шпинделе станка; 3 – стол с рабочим пространством; 4 – панель управления
Технические характеристики станка включают следующие данные: суппорт станка имеет возможность перемещаться в 3-х плоскостях, а стол с заготовкой – в 2-х плоскостях, что обеспечивает 5-ти координатную обработку. Магазин инструментов (в стандартном варианте) вмещает до 31 позиции; частота вращения шпинделя – 12 тыс. об/мин; мощность главного электродвигателя – 18 кВт; максимальный размер заготовки – 450 мм.
В качестве инструментов для обработки заготовок использовались концевые фрезы, метчики и сверла следующих разновидностей: фреза GM-4EL-D6.0 с покрытием TiAlN; концевая 3-заходная твердосплавная фреза AL-3E-D3.0 с покрытием DLC; концевая фреза 3ALE-050-130-S06; концевая 2-заходная сферическая твердосплавная фреза R1x75x4Dx2F с покрытием AlTiN; концевая фреза P290 EPWD20-2-100-W20-12 с твердосплавными пластинами P290 ACKT 1204PDR-FW; метчик 2620-3787 2, (d=1,8 мм, l=41,0 мм), ГОСТ 3266; метчик 2620-1043 2,5, (d=2,5 мм, l=44,5 мм), ГОСТ 3266; спиральное сверло 2300-0811, (d=1,6 мм, l=43 мм), ГОСТ 19543; спиральное сверло 2300-0818, (d=2,1 мм, l=49 мм), ГОСТ 19543; спиральное сверло 2300-0934, (d=3 мм, l=61 мм), ГОСТ 19543.
Обработка заготовок велась с использованием смазочно-охлаждающей жидкости (СОЖ) марки «Blasocut 4000 CF» швейцарского производителя «BlaserSwisslubeAG».
На рис. 3 изображена конструкция изготовленной модели шахтного копра, а на рис. 4 представлена ее принципиальная электрическая схема.
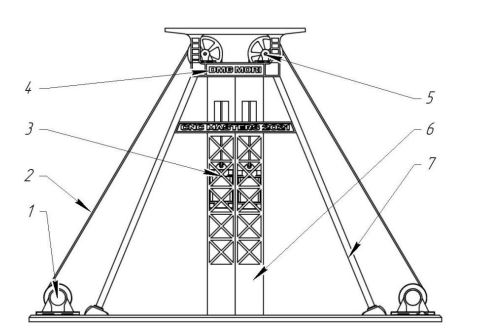
Рис. 3 – Конструкция шахтного копра:
1 – электродвигатель привода лебедки; 2 – трос для перемещения шахтных клетей; 3 – шахтные клети; 4 – площадка для установки шкивов; 5 – шкивы для привода шахтных клетей; 6 – шахтный ствол; 7 – наклонные опоры копра
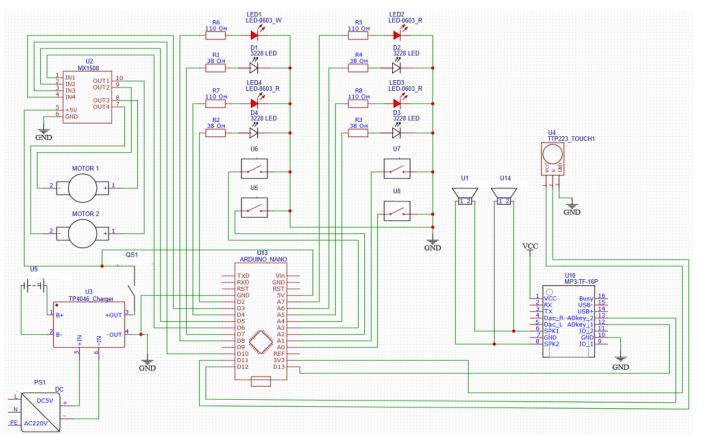
Рис. 4 – Принципиальная электрическая схема модели шахтного копра
Автоматизированный цикл движений модели шахтного копра включает в себя: поочередный подъем и опускание двух шахтных клетей; включение и выключение фонарей в касках фигурок шахтеров; включение четырех красных сигнальных ламп на вершине шахтного копра, как на высотном объекте; включение осветительных ламп в верхней части шахтного копра на период его работы; включение и автоматическое выключение звуковых эффектов в виде проигрывания гимна университета (КузГТУ) на период осуществления движений модели шахтного копра.
В медицинской практике известны следующие разновидности роботизированных устройств, выполняющих роль протезов органов человека: пневматические эластичные элементы (искусственные мышцы) [8]; искусственный мышечный бионический сустав с использованием двух групп пневматических мышц [9]; искусственный мышечный сустав «гепард» [10]; шахматный пневматический искусственный мышечный привод [11]; четырехстержневой шарнирный механизм с двумя пневматическими искусственными мышцами [12], [13]; сферический пневматический гибкий шарнир с переменной жесткостью [14]; компактный бионический манипулятор [15]; складной надувной пневматический мягкий привод [16].
Пневматическая искусственная мышца McKibben состоит из нейлоновой сети управления, эластичной резиновой трубы и двух соединительных патрубков. Когда внутреннее давление воздуха в эластичной резиновой трубе увеличивается, она деформируется и воздействует на нейлоновую сеть. В результате создается радиальное смещение с усилием F и искусственная мышца совершает движение.
Внешний вид такой мышцы показан на рис. 5.

Рис. 5 – Внешний вид пневматической искусственной мышцы «McKibben»
Заключение
При проектировании и последующем производстве сложных изделий и устройств целесообразно осуществлять моделирование их работы с целью прогнозирования поведения в различных ситуациях. Моделирование может оказаться полезным также при реализации демонстрационных задач и в медицинских целях для воспроизведения функционирования тех или иных органов. Такой подход позволяет проводить анализ эффективности использования моделируемых объектов и обеспечивать их визуализацию. Кроме того, становится возможным оптимизировать затраты на изготовление реальных объектов еще на этапе технологической подготовки производства.
Согласно данной концепции спроектирована и изготовлена модель шахтного копра, демонстрирующая функционирование наземной части реальной шахты. Модель символизирует добычу основного вида продукции Кузбасса – каменного угля, в год 300-летия данного региона. Она полностью изготовлена на станке с ЧПУ с использованием программного обеспечения «FUSION 360», «INVENTOR», «КОМПАС-3D», «PowerMILL». Модель участвовала во Всероссийском конкурсе по станкам с ЧПУ (2021 г.) и, по совокупности показателей, заняла второе место среди всех регионов – участников конкурса в России.
Роботизированные модели человеческих органов стали, с недавнего времени, успешно применять в медицинской практике. К таким моделям относятся, в том числе, искусственные мышцы «McKibben» и проектируемые на их основе вращающиеся суставы. Анализ состояния дел в этой сфере говорит о новизне проблематики, ее малой изученности, перспективности и необходимости проведения дальнейших исследований в данном направлении.
Общим в представленных моделях шахтного копра и искусственной мышцы «McKibben» является процесс создания роботизированных устройств, моделирующих реальные объекты и имеющих ряд одинаковых технических подходов и решений.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Сыркин П.С. Шахтное и подземное строительство. Технология строительства горизонтальных и наклонных выработок / П.С. Сыркин, И.А. Мартыненко, М.С. Данилкин. – Новочеркасск : ЮРГТУ, 2002. – 430 с.
- Винарский Е.Н. Копры для проходки шахтных стволов / Е.Н. Винарский, А.В.Линков – Москва : ГОСГОРТЕХИЗДАТ, 1962. – 182 с.
- Ловыгин А.А. Современный станок с ЧПУ и CAD/CAM система / А.А. Ловыгин, А.В.Васильев. – Эльф ИПР, 2006 г. – 288 c.
- Клайн Л.С. Fusion 3D-моделирование для мейкеров / Л.С. Клайн. – БХВ, 2021. – 288 с.
- Гузненков В.Н. Трехмерное моделирование деталей и выполнение электронных чертежей / В.Н.Гузненков, Е.В. Винцулина. – ДМК Пресс, 2017. – 127 с.
- Сурина Е.С. Разработка управляющих программ для системы ЧПУ / Е.С. Сурина. – Лань, 2019. – 268 с.
- Герасимов А.А. Самоучитель КОМПАС-3DV19 / А.А. Герасимов. – БХВ, 2021. – 624 с.
- Li M. Review on Key Technologies of bionic flexible joint / M. Li, Y. Ma, M. Zhang // Mechanical design. – 2018. – № 35(11). – Pp. 1–9.
- Wang B. Modeling and fuzzy control of cascade pneumatic muscle humanoid elbow joint / B. Wang, B. Zhang, G. Shen et al // Robot. – 2017. – № 39(04). – Pp. 474–480.
- Xin W. Development of an antagonistic bionic joint controller for a musculoskeletal quadruped / W. Xin, L. Mantian, G. Wei et al. // 2013 IEEE / RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, 2013. – 4466–4471.
- Lee Hyuk Jin A bundled staggering patterned pneumatic muscle actuator for improved working efficiency / H.J. Lee, K.H. Lee, Y.M. Lee et al. // Journal of Mechanical Science and Technology. – 2019. – № 33(10). – Pp. 1–9.
- Ho Pham Huy Anh Adaptive evolutionary neural control of perturbed nonlinear serial PAM robot / Ho Pham Huy Anh, Nguyen Ngoc Son, Nguyen Thanh Nam // Neurocomputing. – 2017. – № 267. – Pp. 525–544.
- Nguyen Ngoc Son A novel adaptive feed- forward-PID controller of a SCARA parallel robot using pneumatic artificial muscle actuator based on neural network and modified differential evolution algorithm / Nguyen Ngoc Son, Cao Van Kien, Ho Pham Huy Anh. // Robotics and Autonomous Systems. – 2017. – № 96. – 1–30.
- Boehler Q Design and evaluation of a novel variable stiffness spherical joint with application to MR-compatible robot design / Quentin B., Marc V., Salih A. et al. // 2016IEEE International Conference on Robotics and Automation (ICRA), Stockholm , Sweden2016. – Pp. 661–667.
- Inderjeet S. Performance’s evaluation of inverse kinematic: Models of a compact bionic handling assistant / I. Singh, O. Lakhal, Y. Amara et al. // 2017 IEEE International Conference on Robotics and Biomimetics. Macau SAR. China 2017. – Pp. 264–269.
- Nishioka Y. Development of a pneumatic soft actuator with pleated inflatable structures / Y. Nishioka, M. Uesu, H. Tsuboi et al. // Advanced Robotics. – 2017. – № 31(14). – Pp. 753–762.
Список литературы на английском языке / References in English
- Syrkin P.S. Shahtnoe i podzemnoe stroitel'stvo. Tehnologija stroitel'stva gorizontal'nyh i naklonnyh vyrabotok [Mine and underground construction. Technology of construction of horizontal and inclined workings] / P.S. Syrkin, I.A. Martynenko, M.S. Danilkin. – Novocherkassk : JuRGTU, 2002. – 430 p. [in Russian]
- Vinarskij E.N. Kopry dlja prohodki shahtnyh stvolov [Copra for sinking mine shafts] / E.N. Vinarskij, A.V.Linkov – Moscow : GOSGORTEHIZDAT, 1962. – 182 p. [in Russian]
- A. Lovygin Sovremennyj stanok s ChPU i CAD/CAM Sistema [Modern CNC machine and CAD/CAM system] / A.A. Lovygin, A.V. Vasil'ev. – Jel'f IPR, 2006. – 288 p. [in Russian]
- Klajn L.S. Fusion 360. 3D-modelirovanie dlja mejkerov [Fusion 360. 3D modeling for makers] / L.S. Klajn. – BHV, 2021. – 288 p. [in Russian]
- Guznenkov V.N. Trehmernoe modelirovanie detalej i vypolnenie jelektronnyh chertezhej [Three–dimensional modeling of parts and execution of electronic drawings] / V.N. Guznenkov, E.V. Vinculina. – DMK Press, – 127 p. [in Russian]
- Surina E.S. Razrabotka upravljajushhih programm dlja sistemy ChPU [Development of control programs for the CNC system] / E.S. Surina. – Lan', 2019. – 268 p. [in Russian]
- Gerasimov A.A. Samouchitel' KOMPAS-3D V19 [Tutorial COMPASS-3D V19] / A.A. Gerasimov. – BHV, 2021. – 624 p.
- Li M. Review on Key Technologies of bionic flexible joint / M. Li, Y. Ma, M. Zhang // Mechanical design. – 2018. – № 35(11). – Pp. 1–9.
- Wang B. Modeling and fuzzy control of cascade pneumatic muscle humanoid elbow joint / B. Wang, B. Zhang, G. Shen et al // Robot. – 2017. – № 39(04). – Pp. 474–480.
- Xin W. Development of an antagonistic bionic joint controller for a musculoskeletal quadruped / W. Xin, L. Mantian, G. Wei et al. // 2013 IEEE / RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, 2013. – 4466–4471.
- Lee Hyuk Jin A bundled staggering patterned pneumatic muscle actuator for improved working efficiency / H.J. Lee, K.H. Lee, Y.M. Lee et al. // Journal of Mechanical Science and Technology. – 2019. – № 33(10). – Pp. 1–9.
- Ho Pham Huy Anh Adaptive evolutionary neural control of perturbed nonlinear serial PAM robot / Ho Pham Huy Anh, Nguyen Ngoc Son, Nguyen Thanh Nam // Neurocomputing. – 2017. – № 267. – Pp. 525–544.
- Nguyen Ngoc Son A novel adaptive feed- forward-PID controller of a SCARA parallel robot using pneumatic artificial muscle actuator based on neural network and modified differential evolution algorithm / Nguyen Ngoc Son, Cao Van Kien, Ho Pham Huy Anh. // Robotics and Autonomous Systems. – 2017. – № 96. – 1–30.
- Boehler Q Design and evaluation of a novel variable stiffness spherical joint with application to MR-compatible robot design / Quentin B., Marc V., Salih A. et al. // 2016IEEE International Conference on Robotics and Automation (ICRA), Stockholm , Sweden2016. – Pp. 661–667.
- Inderjeet Performance’s evaluation of inverse kinematic: Models of a compact bionic handling assistant / I. Singh, O. Lakhal, Y. Amara et al. // 2017 IEEE International Conference on Robotics and Biomimetics. Macau SAR. China 2017. – Pp. 264–269.
- Nishioka Y. Development of a pneumatic soft actuator with pleated inflatable structures / Y. Nishioka, M. Uesu, H. Tsuboi et al. // Advanced Robotics. – 2017. – № 31(14). – Pp. 753–762.