Return to article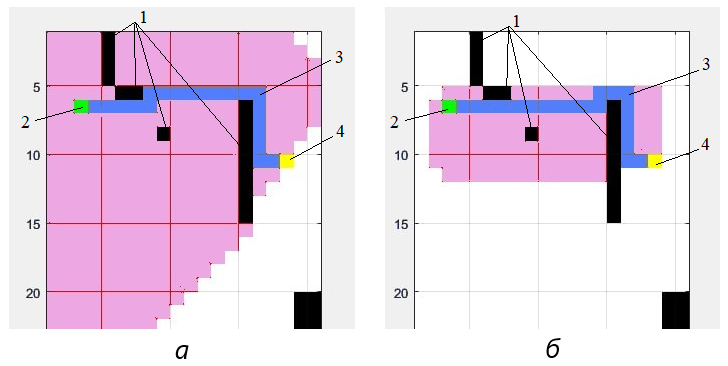
Сравнительный анализ алгоритмов построения оптимального маршрута полета летательного аппарата при наличии зон угроз
Рисунок 1 - Карта маршрутов:
а – метод Дейкстры; б – метод А*; 1 – препятствия; 2 – начальная точка; 3 – путь; 4 – целевая точка