Вернуться к статье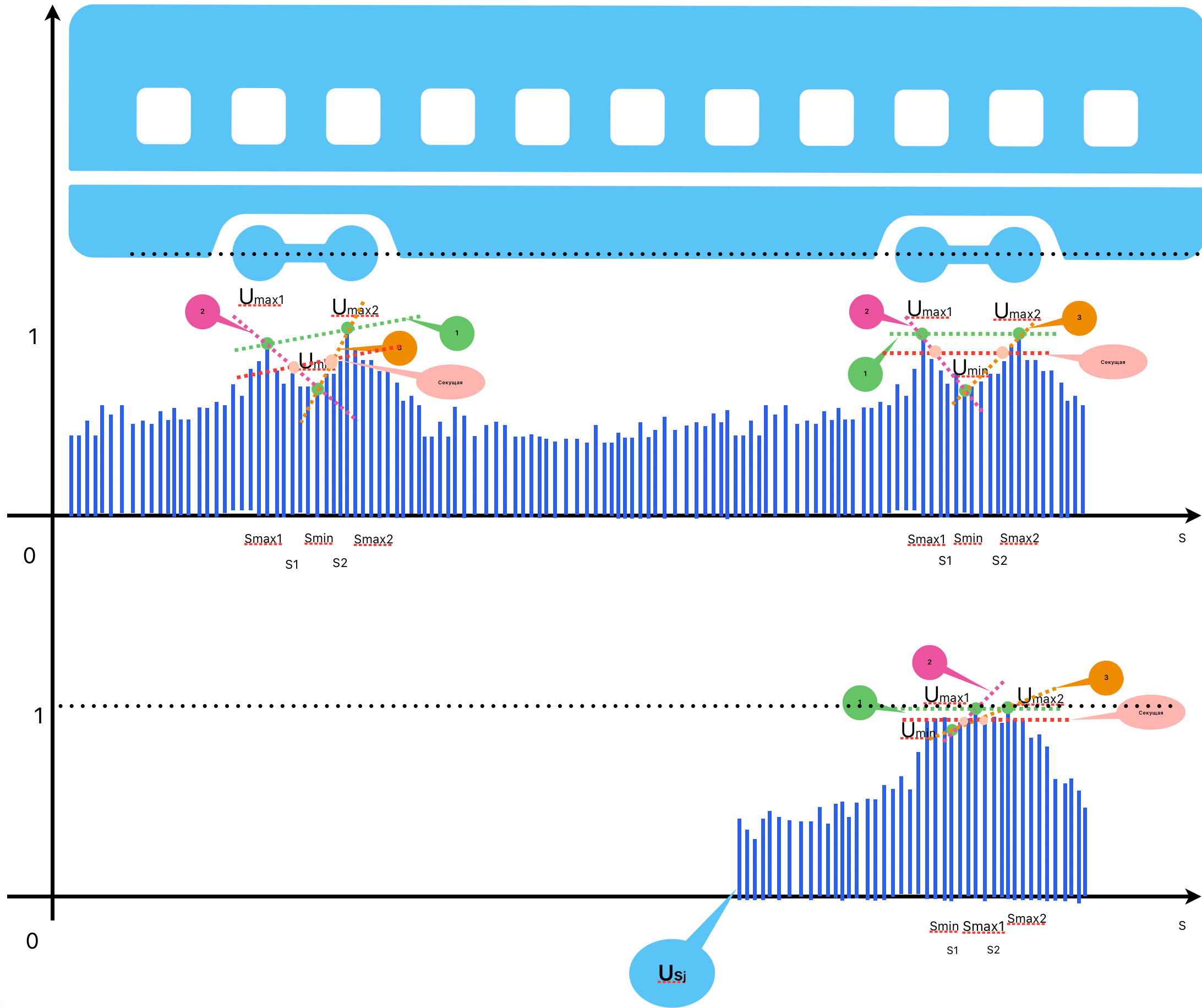
Модель идентификации состояния подвижного состава при его движении на основе оптического сенсора
Рисунок 1 - К модели определение проезда колесных пар
Рисунок 1 - К модели определение проезда колесных пар
Политика конфиденциальности, обработки, хранения персональных данных и сбора статистической информации определяет политику Оператора в отношении обработки Данных Пользователей при использовании ими Ресурса, а также содержит сведения о реализуемых требованиях к защите персональных данных Пользователей и использовании файлов cookie согласно п. 1. ст. 6 № 152-ФЗ "О персональных данных". Подробнее о целях, сведениях и отзыве согласия.