СИНТЕЗ НЕЛИНЕЙНЫХ ДВУХУРОВНЕВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУШНОГО СУДНА

Сизых В.Н.1, Диль В.Ф.2
1 Доктор технических наук, профессор, Иркутский государственный университет путей сообщения, 2 Аспирант, доцент, Московский государственный технический университет гражданской авиации, Иркутский филиал
СИНТЕЗ НЕЛИНЕЙНЫХ ДВУХУРОВНЕВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУШНОГО СУДНА
Аннотация
В статье рассмотрена методика синтеза нелинейной системы управления траекторным и угловым движениями воздушного судна. Пилотажный контур управления организуется по методу обратных задач динамики, траекторный – по методу прямой задачи динамики. Предложенная методика синтеза позволяет обеспечить построение систем автоматического управления по исходным математическим моделям нелинейных объектов.
Ключевые слова: система автоматического управления, обратная и прямая задачи динамики, нелинейный синтез, воздушное судно.
Sizykh V.N.1, Dil V.F.2
1 PhD in Engineering, Professor, Irkutsk State Transport University, 2 Postgraduate student, Associate professor, Moscow State Technical University of Civil Aviation, Irkutsk Branch
SYNTHESIS OF NONLINEAR AUTOMATIC CONTROL FOR THE AIRCRAFT TWO LEVELS MOVEMENTS
Abstract
In article the synthesis methodology of the aircraft nonlinear control for the trajectory and angular movements is considered. Angular level is realized by methods of the inversed dynamics problems, trajectory ones – by method a direct dynamics problem. Supported synthesis methodology allows to provide creation of control systems by primary nonlinear objects models.
Keywords: control system, direct and inversed problems of dynamics, nonlinear synthesis, aircraft.
Введение
Задача синтеза систем автоматического управления (САУ) воздушного судна (ВС) как нелинейных объектов остается актуальной. Большинство применяемых на практике подходов теории управления опираются на линеаризованные математические модели ВС, что адекватно большинству режимов полета. Однако на некоторых режимах полета такая подмена недопустима ввиду существенного отличия свойств реального объекта от его математического аналога.
Одним из методов, позволяющим выполнить синтез системы управления для нелинейных объектов, является метод, основанный на концепции обратных задач динамики (ОЗД), глубоко проработанный П.Д. Крутько и другими видными учеными нашей страны.
Сущность обратных задач динамики сводится к нахождению управляющих сил и моментов, под действием которых объект будет двигаться по назначенной траектории. Применение методов ОЗД позволяет осуществить синтез САУ как для линейных, так и для нелинейных объектов. При этом синтезированный закон управления является оптимальным в смысле реализации назначенной траектории движения объекта [3, с.207]. Ввиду того, что синтез законов управления САУ методом ОЗД опирается на продувочные характеристики модели ВС, то САУ становится адаптивной к изменяемым свойствам ВС. Эти качества метода ОЗД позволяют утверждать о перспективности синтеза САУ подобным образом.
Для выполнения синтеза нелинейной САУ применяется математическая модель пространственного движения ВС. Основой математической модели (ММ), как и для большинства технических задач, является модель ВС как абсолютно твердого тела. Вид ММ ВС приведен во многих научных и учебных изданиях [1, 2].
ММ ВС включает динамические уравнения поступательного и вращательного движений ВС в связанной СК, кинематические соотношения между параметрами поступательного и вращательного движений, уравнения связей между параметрами ВС, аэродинамические силы и моменты, выраженные через безразмерные аэродинамические коэффициенты [1].
В пространстве состояний уравнение движения ВС как твердого тела описывается дифференциальной системой
![]() ,
,
где x — n-вектор фазовых координат; u — m-вектор управляющих воздействий; A, B — матрицы при векторе состояния и управлении соответственно размеров n×n и n×m.
Для пространственного движения ВС вектор фазовых координат (вектор состояния) x является 18-мерным вектором
![]() ,
,
а управлениями являются относительные моменты и силы
Рассмотрим двухуровневый подход к процессу управления. На верхнем уровне осуществляется траекторное движение, на нижнем - угловое движение ВС. Решение задачи синтеза пилотажного уровня управления ВС организуется методом обратных задач динамики, а траекторный контур непосредственно реализуется путем решения прямой задачи динамики.
- Описание динамики вращательного движения неманевренного ЛА как твёрдого тела
Вращательное движение ЛА описывается в связанной системе координат (СК) динамическими уравнениями Эйлера

где ![]() — главные моменты инерции ЛА.
— главные моменты инерции ЛА.
В общем случае моменты в связанной системе координат представляют собой векторную сумму аэродинамических моментов; моментов, создаваемых тягой авиационных двигателей, и гироскопических моментов, зависящих от кинетического момента вращающихся частей авиадвигателя. Из названных моментов управляющими являются аэродинамические моменты.
Аэродинамические моменты зависят от аэродинамической компоновки ВС, режимов полета, положений органов управления. Они выражаются через параметры ВС и аэродинамические коэффициенты mi (i = x, y, z):
![]()
где ![]() — диагональная матрица характеристических линейных размеров ВС (l — размах крыла, ba — длина среднеквадратической хорды),
— диагональная матрица характеристических линейных размеров ВС (l — размах крыла, ba — длина среднеквадратической хорды),
S — эффективная площадь крыла, ![]() — скоростной напор, V — воздушная скорость,
— скоростной напор, V — воздушная скорость, ![]() — безразмерные коэффициенты аэродинамических моментов, действующих по осям связанной СК.
— безразмерные коэффициенты аэродинамических моментов, действующих по осям связанной СК.
Оставив в выражениях коэффициентов наиболее существенные составляющие, получим следующие их выражения:


![]() .
.
Динамические уравнения Эйлера с учётом замены подстрочных индексов x,y,z на арабские цифры 1,2,3 запишутся в виде

Ms — управляющие моменты; s=1..3.
Алгоритмы управления вращательным движением неманевренного ЛА наиболее просто синтезируются методом обратных задач динамики в сочетании с оптимизацией системы (1.4) по локальным функционалам, характеризующим энергию движения [4, c.54].
Основные этапы построения методики синтеза алгоритмов сводятся к следующему:
1) Динамические характеристики проектируемой системы назначаются с помощью эталонных моделей для каждой степени свободы по реакции на «скачок» рулей. Назначенные траектории определяют требуемый пространственный манёвр ЛА и, главным образом, характеризуются свойствами эталонных моделей вращательного движения.
2) Структура алгоритмов и их параметры выбираются из условия отслеживания с необходимой точностью фазовых траекторий эталонных моделей вращательного движения.
3) Степень близости угловых скоростей объекта и эталона оценивается с помощью квадратичных функционалов энергии ускорения.
Процесс движения к экстремуму – минимуму организуются по схеме градиентного метода или по дифференциальной схеме. Такие алгоритмы управления обладают свойствами естественной адаптивности, позволяют осуществить декомпозицию нелинейной системы (1.4) по степеням свободы за счёт организации обратных связей с большими, но ограниченными коэффициентами усиления [4, c.72].
- Алгоритм управления вращательным движением по ускорениям методом ОЗД
Сформулируем задачу синтеза управления на примере стабилизации угловых скоростей на интервале времени [t0, tk], полагая t0=0, момент времени tk нефиксированной величиной. Пусть в текущий момент времени t=t0=0 состояние управляемого объекта характеризуется значениями угловых скоростей ωs(0)=ωs0, и требуется найти такие управляющие воздействия δi (i=э, н, в), при которых система (1.4) переходит из состояния ω*s(0) в новое состояние ωs0 (в общем случае ωs0=ωs0(t) определяет необходимую фигуру вращения) и находится в этом состоянии бесконечно долго. При этом необходимо, чтобы траектория управляемого движения по каждой степени свободы с требуемой точностью следовала за траекторией, определяемой эталонной моделью
![]()
где ![]() , установившееся движение устойчиво:
, установившееся движение устойчиво: ![]() , при t→∞.
, при t→∞.
Степень приближения управляемого процесса ![]() оценивается функционалом
оценивается функционалом

который характеризует энергию ускорения вращательного движения в окрестности фазовых траекторий эталонной модели.
Задача синтеза решается достаточно просто, если в качестве управляющих функций выбирать не отклонения рулей ![]() ВС, а управляющие моменты
ВС, а управляющие моменты ![]() . На первом этапе синтезируются законы управления
. На первом этапе синтезируются законы управления ![]() , а затем из формул (1.3) и (1.4) через решение системы алгебраических уравнений определяются искомые управляющие воздействия
, а затем из формул (1.3) и (1.4) через решение системы алгебраических уравнений определяются искомые управляющие воздействия ![]() .
.
Законы управления моментами ![]() по каждой степени свободы получаем, применяя схему простого градиентного метода
по каждой степени свободы получаем, применяя схему простого градиентного метода

Согласно (1.4), (2.2) компоненты градиента в (2.3) равны
![]()
Отсюда следует, что

или после интегрирования по времени обеих частей

где требуемые значения угловой скорости ![]() вычисляются из модели эталонного движения (2.1). Структура матрицы
вычисляются из модели эталонного движения (2.1). Структура матрицы ![]() определяется характером перекрестных связей по
определяется характером перекрестных связей по ![]() в (1.4)
в (1.4)
Управляющие воздействия δi определяются из уравнений (1.3), (1.4), (2.7), (2.8).


где ![]()
![]()
![]()
![]()
![]()
![]()
- Алгоритм управления траекторным движением воздушного судна
Синтезированные законы управления рулями di (2.7) позволяют определить управляющие перегрузки (или выражаемые через них аэродинамические силы Fi) через формулы:
![]()
![]()
![]()


Траекторное движение ЛА описывается уравнениями
![]()
![]()
где ![]() - второй столбец матрицы направляющих косинусов
- второй столбец матрицы направляющих косинусов ![]() c начальными условиями, определяемыми балансировочными значениями углов Эйлера:
c начальными условиями, определяемыми балансировочными значениями углов Эйлера:
![]() и положениями рулей
и положениями рулей ![]() ;
;
 - ортогональная, кососимметрическая матрица угловых скоростей
- ортогональная, кососимметрическая матрица угловых скоростей ![]() , которая вычисляется в пилотажном контуре;
, которая вычисляется в пилотажном контуре; ![]() - вектор земной скорости.
- вектор земной скорости.
Полагая, что угловые скорости ![]() (s=1..3) поступают из пилотажного контура, получим разрешимую систему дифференциальных уравнений, решение которой сводится к численному или аналитическому интегрированию этих уравнений.
(s=1..3) поступают из пилотажного контура, получим разрешимую систему дифференциальных уравнений, решение которой сводится к численному или аналитическому интегрированию этих уравнений.
Таким образом, реализуется следующая прямая задача динамики.
Известна математическая модель поступательного движения ВС (3.1, 3.2) и её состояние в начальный момент времени
![]() .
.
Заданы управляющие перегрузки ![]() , tк – конечное время.
, tк – конечное время.
Решение сформулированной прямой задачи сводится к простому интегрированию системы (3.1) – (3.2) с начальными условиями (3.3) и ![]() .
.
Для определения текущих углов Эйлера достаточно вместо интегрирования кинематических уравнений Эйлера использовать 3 уравнения связи из матрицы направляющих косинусов
![]()
Далее по формулам

определяются координаты пространственного движения ВС ![]() в нормальной СК и составляющие вектора воздушной скорости в скоростной СК.
в нормальной СК и составляющие вектора воздушной скорости в скоростной СК.
При отсутствии ветровых возмущений ![]() вектор земной скорости совпадает с вектором воздушной скорости
вектор земной скорости совпадает с вектором воздушной скорости ![]() , и второе слагаемое уравнения (3.5) не учитывается.
, и второе слагаемое уравнения (3.5) не учитывается.
Затем определяем текущие значения углов атаки и скольжения ![]()
![]() . (3.6)
. (3.6)
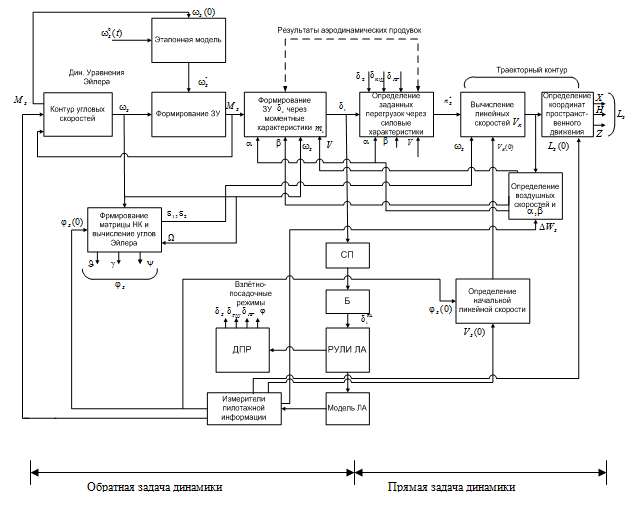
Рис. 3.1 - Структура контуров управления нелинейной САУ
На рисунке 3.1 представлена структурная схема нелинейной САУ, в которой реализованы предложенные алгоритмы. Для контура вращательного движения входными параметрами являются эталонные и текущие значения угловых скоростей и параметры углового положения ВС. Выходными величинами для этого контура являются угловые отклонения рулевых поверхностей. Для контура траекторного управления входными величинами являются выходные параметры контура вращения, начальные значения траекторных параметров. Выходными величинами являются координаты пространственного движения ВС. Для реализации контуров управления требуются измерители угловых скоростей ДУС, измерители координат (акселерометры), измерители углового поля (ГВ, КС), измерители скорости, измерители сдвига ветра.
- Исследование функционирования контуров управления
Исследование осуществлялось путем численного моделирования контура вращательного движения с использованием программы MathCad. При этом была выбрана эталонная модель движения ВС, соответствующая динамическим свойствам маломаневренного ВС. Моделирование проводилось при различных значениях коэффициентов передачи контура управления угловой скорости, что соответствовало различным режимам полета. При всех выбранных значениях коэффициентов система оставалась устойчивой. При больших значениях коэффициента время сходимости было наименьшим. Таким образом, построение САУ по предложенному принципу является перспективным.
Ставилась задача исследования контура управления вращательным движением с подстройкой под эталонную модель. Параметры эталонной модели (2.1) рассчитывались по формулам
Постоянные времени в эталонной модели определялись путем имитационного моделирования на языке Паскаль по реакции нелинейной модели самолёта ИЛ-76М на "скачки" рулей высоты, направления и элеронов в 10 градусов. При этом осуществлялось варьирование коэффициентов усиления в законах управления вращательным движением самолета ИЛ-76М при решении задачи стабилизации угловых скоростей. Исследования показали справедливость разработанных ранее теоретических положений: чем больше значения коэффициентов усиления в законах управления, тем выше близость угловых скоростей вращательного движения к угловым скоростям эталонной модели (![]() при
при ![]() ). Результаты моделирования для случая средних значений коэффициентов усиления rij представлены соответственно на рисунках 4.1.-4.3.
). Результаты моделирования для случая средних значений коэффициентов усиления rij представлены соответственно на рисунках 4.1.-4.3.
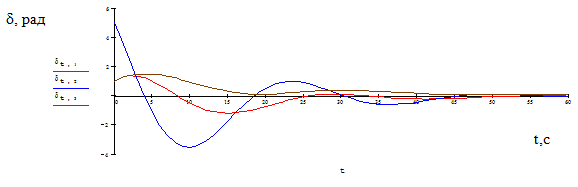
Рис.4.1 - Отклонения рулей
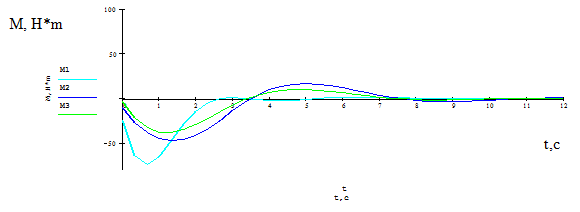
Рис.4.2 - Изменение управляющих моментов
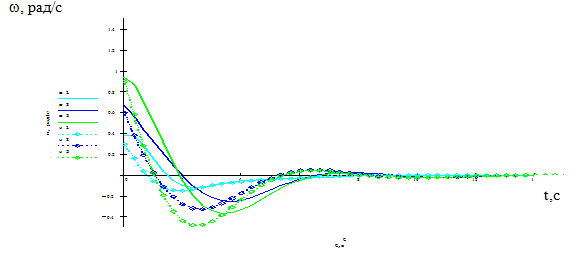
Рис.4.3 - Подстройка угловых скоростей под эталон
Выводы
- Разработано алгоритмическое обеспечение пилотажного уровня управления ВС на основе метода обратных задач динамики.
- Выполнено моделирование вращательного движения самолета ИЛ-76 на основе алгоритмов управления с естественными свойствами адаптации под эталонную модель.
Сравнительный анализ результатов моделирования показывает:
- Отработка рассогласования угловых скоростей вращательного движения ВС в нелинейной САУ происходит за более короткое время и с меньшими амплитудами параметров, то есть интенсивнее, чем при использовании штатных законов управления САУ-1Т-2Б.
- Эффективность управления проявляется в более высоком качестве переходных процессов по высоте и по отклонению руля высоты.
Литература
- Буков В. Н., Сизых В. Н. Метод и алгоритмы решения сингулярно-вырожденных задач аналитического конструирования регуляторов // Изв. АН. Теория и системы управления. М.: 2001, №5. С.43-61.
- Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. М.: Наука, 1973. – 240с.
- Бюшгенс Г.С. Студнев Р.В. Динамика продольного и бокового движения. М: Машиностроение, 1979. – 350c.
- А.В. Ефремов, В.Ф. Захарченко, В.Н. Овчаренко и др.под ред. Г.С. Бюшгенса.Динамика полета. М.: Машиностроение, 2011. –776 с.
- Крутько П.Д. Обратные задачи динамики управляемых систем. Нелинейные модели. – М.: Наука, Гл. ред. физ.–мат. лит., 1988.– 328 с.
- Крутько П. Д. Обратные задачи динамики в теории автоматического управления. М.: Машиностроение, 2004. – 576с.
References
- Bukov V. N., Sizykh V. N. Metod and algorithms of the solution of singular and singular problems of analytical designing of regulators//Izv. AN. Theory and control systems. M.: 2001, No. 5. - Pp. 43-61.
- Krasovsky A.A. Systems of an automatic flight control and their analytical designing. M.: Science, 1973. – 240p.
- Byushgens G. S. Studnev of R. V. Dynamics of longitudinal and lateral motion. М: Mechanical engineering, 1979. – 350p.
- Efremov A.V., Zakharchenko V. F., Ovcharenko V. N. Dynamics of flight. M.: Mechanical engineering, 2011. –776 p.
- Krutko P. D. The return problems of dynamics of the operated systems. Nonlinear models. – M.: Science, 1988. – 328 p.
- Krutko P. D. The inversed problems of dynamics in the theory of automatic control. M.: Mechanical engineering, 2004. – 576p.