ОБ АКТУАЛЬНОСТИ ЗАДАЧИ ПОСТРОЕНИЯ МОДЕЛИ ПОВЕДЕНИЯ ОБЪЕКТА СО СВОБОДНЫМ ВЫБОРОМ ПОВЕДЕНИЯ

Залесков А.С.1, Андрашитов Д.С.2
1Адъюнкт, 2Кандидат технических наук, Военная академия ракетных войск стратегического назначения им. Петра Великого
ОБ АКТУАЛЬНОСТИ ЗАДАЧИ ПОСТРОЕНИЯ МОДЕЛИ ПОВЕДЕНИЯ ОБЪЕКТА СО СВОБОДНЫМ ВЫБОРОМ ПОВЕДЕНИЯ
Аннотация
В статье рассматривается актуальность задачи построения модели движения объекта со свободным выбором поведения. Выбор поведения объекта осуществляется на основе определения его технического состояния, закона управления и максимального числа факторов, учитываемых при принятии решения на управление.
Ключевые слова: терминальное управление, объект испытаний, критерий качества, признаковое пространство.
Zaleskov A.S.1, Andrahitov D.S.2
1Adyunkt, 2Kandidat Technical Sciences, Military Academy of Strategic Missile Forces them Peter the Great
ON THE VITAL TASKS OF CONSTRUCTING THE MODEL THE BEHAVIOR OF OBJECTS WITH FREE ELECTIONS CONDUCT
Abstract
The article discusses the relevance of the problem of constructing models of the movement of the object with a free choice of behavior. Choice behavior of an object is based on the definition of its technical condition, the control law and the maximum number of factors to consider when deciding on management.
Keywords: terminal control, to test the quality criterion, the feature space.
Современные условия ведения войны предъявляют высокие требования к качеству ракетных и космических систем. При этом особый интерес вызывают системы с терминальным управлением. Выбор поведения таких систем является актуальной научной задачей. Это объясняется тем, что методы наведения таких систем не используют заранее рассчитанные программы полета, а вырабатывают команды наведения в процессе движения [1]. Однако, отсутствие взаимодействия между измерительным, управляющим и исполнительным элементом бортовой системы управления, отсутствие законов управления в зависимости от неучтенного возмущающего фактора или невозможность его отработать исполнительным элементом и др. причины приводят к тому, что выбор поведения объектом далеко не всегда является наилучшим. Это в свою очередь может привести к не выполнению функционала отдельной системой, и к срыву боевой задачи в целом.
Для решения данной задачи разработан широкий спектр методов и алгоритмов, однако эффективность их функционирования во многих практически важных случаях не позволяет построить оптимальную математическую модель для конкретного исследуемого объекта.
К наиболее распространенным методам выбора поведения объекта относятся статистические методы, позволяющие выработать правила управления объектом за счет многократного проведения опытов. Что делает такие методы экономически не целесообразными.
Широкая группа методов при построении модели поведения объекта априори учитывает влияние тех или иных факторов на объект исследования. Однако число неучтенных влияющих факторов в любой момент может привести к неправильной работе управляющих элементов.
Таким образом, избавиться от указанных недостатков, влияющих на выбор поведения объекта с терминальным управлением за счет существующих методов не возможно.
Цель: Определить техническое состояние объекта испытания и уточнить на основании этого модель его поведения.
Постановка задачи
- Задана модель функционирования объекта испытаний со свободным выбором поведения:
 (1) где
(1) где  – параметры состояния объекта, учитываемые при выборе модели его поведения,
– параметры состояния объекта, учитываемые при выборе модели его поведения,  – параметры состояния объекта, не учитываемые при выборе модели его поведения, N – действительное число,
– параметры состояния объекта, не учитываемые при выборе модели его поведения, N – действительное число,  – начальное и конечное время испытаний.
– начальное и конечное время испытаний.
- Известна модель наблюдения объекта испытаний:
 (2)
(2)
где  - шумы наблюдения с известными характеристиками.
- шумы наблюдения с известными характеристиками.
Выбор поведения объекта при реальных условиях испытаний зависит от параметров состояния объекта X, а при построении модели наблюдения Y, как правило, учитываются только те параметры, которые можно измерить в процессе испытаний объекта .
Требуется: по результатам измерений определить текущие состояние объекта и уточнить модель его поведения согласно критерию
 (3)
(3)
Данная задача относится к задаче идентификации. Одним из возможных путей решения поставленной задачи является формирование признаков выбора правила поведения объекта испытания. Таким образом, математическая постановка (1) – (3) может быть представлена в виде следующей блок-схемы на рис. 1.
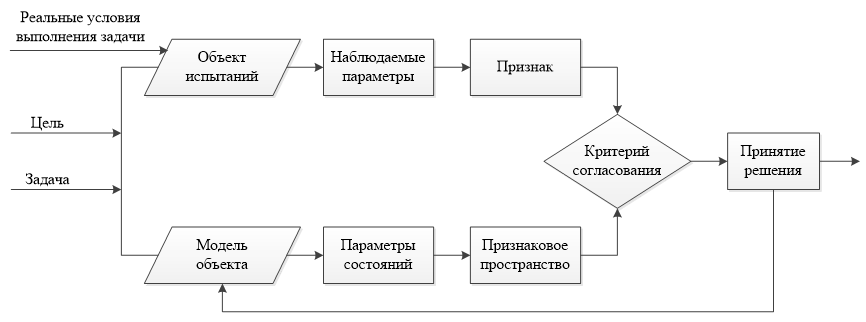
Рис.1 - Задача построения модели поведения объекта со свободным выбором поведения
Решение такой задачи может быть основано на принципах имитационного моделирования и построения нечетких выводов [2]. Для этого следует сформулировать признак идентификации в виде правила поведения объекта в форме нечетких условных суждений типа
IF A THEN B (ЕСЛИ X ТО Y). (4)
Переменные данного правила (4) могут принимать как лингвистические переменные, так и числовые значения. Условные суждения определяются на основе обработки информации, полученной при испытании объекта.
Таким образом, наблюдаемые и имитируемые параметры необходимо представить в виде лингвистических переменных вида
<β,T,X,G,M >, (5)
где β - наименование лингвистической переменной,
Т - множество ее значений (терм-множество), представляющих собой наименования нечетких переменных, областью определения каждой из которых является множество X. Множество T называется базовым терм-множеством лингвистической переменной,
G - синтаксическая процедура, позволяющая оперировать элементами терм-множества T, в частности, генерировать новые термы (значения). Множество , где G(T) - множество сгенерированных термов, называется расширенным терм-множеством лингвистической переменной,
М - семантическая процедура, позволяющая превратить каждое новое значение лингвистической переменной, образуемое процедурой G, в нечеткую переменную, т.е. сформировать соответствующее нечеткое множество.
Пример преобразования значений параметра в лингвистическую переменную
Определить значение параметра X с помощью понятий "малое значение параметра", "среднее значение параметра" и "большое значение параметра ", при этом минимальное значение параметра равно Xmin, а максимальное – Xmax. Формализация такого описания может быть проведена с помощью следующей лингвистической переменной
< β, T, X, G, M>,
где β – параметр X,
T – {"малое значение параметра", "среднее значение параметра", "большое значение параметра"},
X - [Xmin, Xmax],
G - процедура образования новых термов с помощью связок "и", "или" и модификаторов типа "очень", "не", "слегка" и др. Например: "малое или среднее значение параметра", "очень малая значение параметра " и др.,
М - процедура задания на X = [Xmin, Xmax] нечетких подмножеств А1=" малое значение параметра ", А2 = " средние значение параметра", А3=" большое значение параметра", а также нечетких множеств для термов из G(T) в соответствии с правилами трансляции нечетких связок и модификаторов "и", "или", "не", "очень", "слегка" и других операций над нечеткими множествами.
Затем, на основе имитационного моделирования объекта с использованием корреляционного анализа полученных результатов формируются признаки выбора поведения объекта в форме нечетких условных суждений типа IF A THEN B.
Пример формирования признака
IF текущее значение требуемой скорости среднее AND текущее значение скорости, получаемое в результате решения навигационной задачи малое THEN значение командной скорости малое.
Вывод
В основу решения задачи построения модели поведения объекта со свободным выбором поведения следует положить формирование признаков идентификации модели объекта испытания с использованием построения нечетких выводов. Это приведет к повышению качества определения технического состояния объекта испытаний и уточнению модели его поведения.
Список литературы
Бахрамов Э.А., Разоренов Г.Н., Титов Ю.Ф. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями) – М.: Издательство «Машиностроение»,2003 – с. 584.
Васильев В.В., Галаев С.А., Лесниченко Р.И., Мезенцев А.В., Потюпкин А.Ю., Рудаев С.А. Методологические основы испытаний сложных технических систем: Учебное пособие – М.: ВА РВСН им. Петра Великого, 2013 – с. 286.
Список литературы
Бахрамов Э.А., Разоренов Г.Н., Титов Ю.Ф. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями) – М.: Издательство «Машиностроение»,2003 – с. 584.
Васильев В.В., Галаев С.А., Лесниченко Р.И., Мезенцев А.В., Потюпкин А.Ю., Рудаев С.А. Методологические основы испытаний сложных технических систем: Учебное пособие – М.: ВА РВСН им. Петра Великого, 2013 – с. 286.