СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ВНУТРИ ПОМЕЩЕНИЙ

Пантюхин А.Р.1, Беляев А.С.2
1ORCID: 0000-0002-6973-6046, аспирант, Томский государственный университет систем управления и радиоэлектроники, 2ORCID: 0000-0002-0725-4690, аспирант, Национальный исследовательский Томский политехнический университет
СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ВНУТРИ ПОМЕЩЕНИЙ
Аннотация
Системы локализации объектов внутри помещения на сегодняшний день находят широкое применение в сфере обслуживания людей. Потребность в таких системах возрастает вместе с желанием выработки оптимальных алгоритмов управления с точки зрения повышения прибыли (в коммерческих организациях) или повышения эффективности работы (в организациях сферы обслуживания в которых имеются большие потоки людей). В работе представлен метод локализации объектов внутри помещения с применением технологий на основе стандарта IEEE 802.11 (Wi-Fi) или технологии персональных сетей (Bluetooth). Применение данных технологий обосновано их повсеместным внедрением во все мобильные устройства связи и коммуникаций, что в последствии облегчает задачу интеграции подобного рода систем для потребителя. В основу данного алгоритма лёг метод трилатерации, а в качестве количественной оценки эффективности его работы был выбран интегральный квадратичный критерий качества
Ключевые слова: локализация объектов, определение положения, wi-fi, фильтр Калмана, трилатерация.
Pantiukhin A.R. 1, Belyaev A.S.2
1ORCID: 0000-0002-6973-6046, Postgraduate Student, Tomsk State University of Control Systems and Radioelectronics, 2ORCID: 0000-0002-0725-4690, Postgraduate Student, National Research Tomsk Polytechnic University
SYSTEM OF DETERMINATION OF OBJECTS LOCATION INSIDE OF PREMISES
Abstract
The systems of objects localization inside the premises are now widely used in the area of servicing people. The need for such systems increases with the desire to develop the most efficient management algorithms from the point of view of the increasing profit (in commercial organizations) or increasing the efficiency of work (in organizations of the service sector with large flows of people). The paper presents a method for objects localization inside a building using technologies based on the IEEE 802.11 (Wi-Fi) standard or the technology of personal networks (Bluetooth). The application of these technologies is justified by their ubiquitous introduction into all mobile communication devices, which subsequently facilitates the task of integrating such systems for the consumer. This algorithm was based on the trilateration method while an integral quadratic quality criterion is used as a quantitative evaluation of the efficiency of its work.
Keywords: localization of objects, position determination, wi-fi, Kalman filter, trilateration.
В настоящее время, одним из наиболее важных показателей экономически успешного предприятия является – прибыль. Именно поэтому, менеджеры крупных торговых сетей постоянно стремятся к ее увеличению. Существует ряд стандартных приемов, которые позволяют сделать это, одним из них является – «миграция товаров» в магазине. Изменяя положение товаров, менеджеры «ломают» привычный путь покупателя, в поисках действительно нужной товарной позиции, посетитель будет обращать внимание на все продукты, представленные в супермаркете. В большинстве случаев, он обязательно сделает покупку, которую не планировал. Однако, у данного метода есть один существенный недостаток: зачастую, стратегии перестановки товаров основываются на личном опыте работников магазина, и не имеют под собой качественной информацией, именно поэтому очень сложно добиться хороших результатов при использовании данной методологии. Но если отслеживать передвижения покупателей и строить маршруты их перемещений, то появляется возможность оценить насколько эффективно влияет перестановка товаров на общую прибыль супермаркета.
Отдельно стоит отметить, что система универсальна - она может быть использована не только в области ритейла, но и в других направления: от сельского хозяйства до систем контроля безопасности.
Безусловно, на рынке уже представлены решения с подобным функционалом, например: RFID (Radio Frequency Identification) системы. К сожалению, они обладают рядом недостатков: высокая стоимость, порядка нескольких тысяч долларов, и радиоволны высокой мощности, оказывающие вредное действие на человека.
Однако, в последнее время исследователи все больше обращают свое внимание на технологии беспроводной связи: Wi-Fi и Bluetooth. Низка стоимость и высокая степень интеграции позволяют использовать данные средства связи практически повсеместно. Зачастую, даже не требуется развивать инфраструктуру, практически все современные объекты и здания изначально оснащены средствами беспроводной связи. [1], [2].
Для обеспечения малых габаритов устройства отслеживания, применяется плата на основе микросхемы ESP32 изображенного на рисунке 1.

Рис. 1 – Переходник ESP3212
Фильтрация сигнала
Так как в исходном сигнале, получаемом с метки, присутствуют шумы, то необходимо использовать фильтр. Он позволит уменьшить влияние статической ошибки, благодаря чему можно добиться увеличения точности определения местоположения. Фильтр Калмана устраняет шумы (случайные всплески) и выдаёт результат как с учетом результатов текущих измерений, так и с учётом предсказанных результатов на основе прошлых измерений. Фильтр использует динамическую модель системы (закон движения) и две повторяющиеся циклически стадии: предсказание и корректировка. На первом этапе (предсказание) программа рассчитывает состояние системы в следующий момент времени, а на втором (корректировка) – корректирует прогноз, используя результат очередного измерения. Алгоритму фильтра требуется информация о дисперсии сигнала и математическом ожидании. Если дисперсия не зависит от расстояния и времени, то ее принимают, как постоянную величину. Практическое исследование показало, что в нашем случае дисперсию можно считать постоянной величиной. Стоит отметить, что для каждого маршрутизатора и маяка следует определять свое собственное значение дисперсии. Фильтр состоит из двух основных функций: предсказания и корректировки. Рассмотрим более подробно каждую из них.
Стадия корректировки.
Предположим, что имеется два состояния S1 и S2 (рис. 24). Каждое из них имеет дисперсию d1 и d2, математическое ожидание m1 и m2, соответственно. При переходе из состояния S1 в состояние S2, необходимо рассчитать новые дисперсию и математическое ожидание, рассчитываемые по формулам (1).
 (1)
(1)
где m – математическое ожидание в новом состоянии, d – дисперсия в новом состоянии.
Стадия предсказания
В процессе движения объекта фильтр предсказывает его новое состояние, используя для этого формулы (2) для определения нового математического ожидания и новой дисперсии.
![]() (2)
(2)
где m – новое математическое ожидание, d – новая дисперсия.
Пример работы фильтра приведен на рисунке 2. Синий график (рис. 2) – фильтрованный сигнал, а зеленый – исходный сигнал.
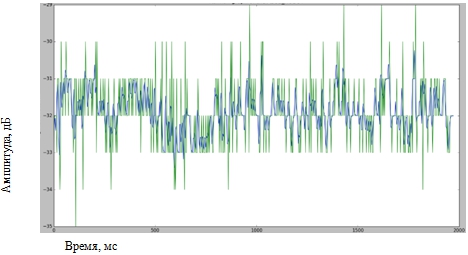
Рис. 2 – Пример работы фильтра Калмана
Определение координат
Для определения координат объекта, по расстоянию от 3-х стационарных точек (далее СТ), используется метод трилатерации. Трилатерация – это метод определения положения геодезических пунктов, путём построения на местности системы смежных треугольников, в которых измеряются длины их сторон. Система координат, будем называть ее глобальной, в ней находится объект, представлена на рисунке 3а.
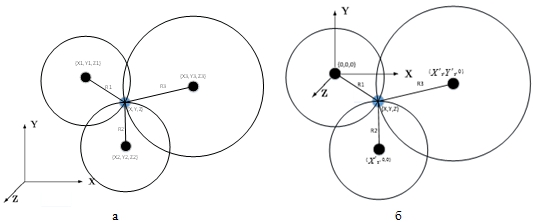
Рис. 3 – а) Глобальная система координат, б) желаемая система координат
где R1, R2, R3 расстояние (в мм) от СТ Pi с координатами {Xi, Yi, Zi} до объекта c координатами {X, Y, Z}, соответственно.
Для упрощения вычислений на первом этапе, перейдем в новое пространство относительно одной из СТ, имеющей минимальные координаты. Предположим, что такому условию удовлетворяет первая СТ. В результате должна получиться следующая система координат, рисунок 3б. Осуществим перенос системы координат таким образом, чтобы точка 1 стала началом новой системы координат. В результате получены следующие координаты (3):
 (3)
(3)
Где ![]() - координаты стационарной точки Pi в новой системе координат, а
- координаты стационарной точки Pi в новой системе координат, а ![]() - координаты точки Pi в старой системе координат
- координаты точки Pi в старой системе координат
Затем повернем систему координат таким образом, чтобы все три стационарные точки лежали в плоскости оси z, а СТ номер 2 лежала на оси Х. Для этого необходимо определить угол поворота по оси Х (угол α), чтобы все 3 точки лежали в одной плоскости, и угол поворота по оси Z (угол φ). Чтобы найти угол по оси Х необходимо рассчитать уравнение нормали, уравнения (4,5). В результате углы α, φ рассчитываются по формулам (6):
 (4)
(4)
Где а-угол поворота во круг оси Х, φ-угол поворота во круг оси Z
Используя матрицы поворота, формулы 7, перейдем к желаемой новой системе координат.
 (7)
(7)
В результате получаем новую систему координат, она представлена на рисунке 1б, для получения координат объекта используется формулы 8
 (8)
(8)
Где R1, R2, R3 –расстояния до объекта от стационарных точек, X, Y, Z- координаты объекта
Для перевода координат из локальной системы в глобальную необходимо умножить их на обратные матрицы M(α) и M(φ) и прибавить координаты первой стационарной точки. Использование данных формул позволяет получить координаты объекта. Для апробации работы системы было выбрано движение по траектории «квадрат», в результате получены следующие координаты движения объекта, обозначенные красными точками, и реальные координаты, обозначенные зелеными точками, представленные на рисунке 4.
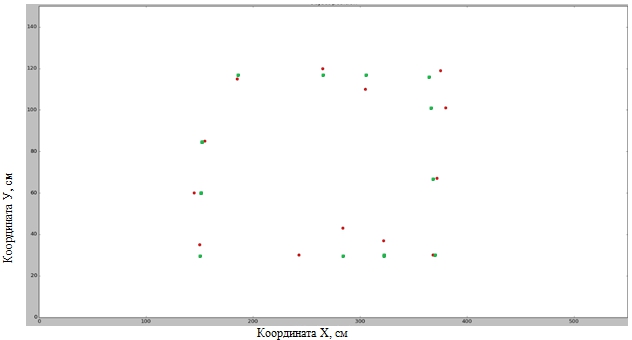
Рис. 4 – График перемещения метки по квадрату
Заключение: система позволяет определять положение объектов между стационарными точками, однако интегральная среднеквадратичная ошибка составляет порядка 20 см, что достаточно много для данной системы. Для увеличения точности возможно использование большего количества стационарных точек, а также использование дополнительной фильтрации по положению.
Список литературы / References
- Ocaña M. Indoor robot navigation using a POMDP based on WiFi and ultrasound observations / Ocaña M. Bergasa L. Sotelo M. Flores R. // in 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS – 2005. pp. 503–508.
- Fu S. Hou Z. An indoor navigation system for autonomous mobile robot using wireless sensor network / Fu S. Hou Z. Yang G. // in 2009 International Conference on Networking, Sensing and Control – 2009, pp. 227–232.
- Li Y. Zhang P. Realtime indoor navigation using smartphone sensors / Li Y. Zhang P. Niu X. Zhuang Y. Lan H. El-Sheimy N. // International Conference on Indoor Positioning and Indoor Navigation (IPIN) – P. 1–10.
- Acer U. Forlivesi C. Liekens W. Perez-cruz F. Kawsar F. Sensing WiFi Network for Personal IoT Analytics / Acer U. Boran A. Forlivesi C. Liekens W. Perez-cruz F. Kawsar F. // 5th International Conference on the Internet of Things (IOT) – 2015, P. 104–111.
- Schantz H. Characterization of error in a Near-Field Electromagnetic Ranging (NFER) Real-Time Location System (RTLS) / Schantz H. Weil C. Unden A. // IEEE Radio and Wireless Week, – 2011 IEEE Radio and Wireless Symposium. 2011. P. 379–382.
- Ran C. Two average weighted measurement fusion Kalman filtering algorithms in sensor networks / Ran C. Deng Z. // Proceedings of the World Congress on Intelligent Control and Automation (WCICA) – P. 2387–2391.
- Gast M. 802.11 Wireless Networks: The Definitive Guide / Gast M. // O’Really Media, Inc. – Second Edition.
- Kim K. Jee The stability of the adaptive two-stage extended Kalman filter / Kim K. Jee G. Song J. // International Conference on Control, Automation and Systems – P. 1378–1383.
- Kim J. Soccer ball tracking using dynamic kalman filter with velocity control / Kim J. Kim T. // Proceedings of the 2009 6th International Conference on Computer Graphics, Imaging and Visualization: New Advances and Trends – P. 367–374.
- Long H. Qu Distributed extended kalman filter based on consensus filter for wireless sensor network / Long H. Qu Z. Fan X. Liu S. // 10th World Congress on Intelligent Control and Automation – P. 4315–4319.