СИНТЕЗ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДВУХЗВЕННОГО ГУСЕНИЧНОГО ТРАНСПОРТЕРА «ВИТЯЗЬ» НА ОСНОВЕ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ

Ильясов Б.Г.1, Хуснутдинов Д.З.2 Яруллин Ч.А.3
1Доктор технических наук, 2Старший преподаватель, 3Кандидат технических наук, Уфимский государственный авиационный технический университет
СИНТЕЗ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДВУХЗВЕННОГО ГУСЕНИЧНОГО ТРАНСПОРТЕРА «ВИТЯЗЬ» НА ОСНОВЕ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
Аннотация
Разработана методика исследования, анализа и синтеза интеллектуальной системы автоматического управления движением двухзвенного гусеничного транспортера «Витязь», основанная на имитационной математической модели. Методика является эффективным средством проектирования систем управления с компенсацией возмущений, действующих на транспортер при движении. Так же в работе проведены некоторые результаты численных экспериментов, на основе, которых проверена адекватность и эффективность разработанной методики.
Ключевые слова: Транспортер «Витязь»; система автоматического управления движением; имитационное моделирование, методика исследования.
Ilyasov B.G.1, Khusnutdinov D.Z.2, Yarullin Ch.A.2
1 PhD in Engineering, 2Senior lecturer, 3 PhD in Engineering, Ufa State Aviation Technical University
THE SYNTHESIS OF INTELLECTUAL SYSTEMS OF MOTION CONTROL OF TWO TRACK CRAWLER TRANSPORTER "VITYAZ" ON THE BASIS OF SIMULATION MODELING
Abstract
The developed methodology of research, analysis and synthesis of intellectual system of automatic control of the movement of the two crawler transporter "Vityaz" is based on imitation mathematical model. The technique is an effective means of designing control systems with compensation of disturbances acting on the conveyor when moving. Also the paper presents some results of numerical experiments on the basis of which tested the adequacy and effectiveness of the developed technique.
Keywords: Transporter «Vityaz», the system of automatic motion control, simulation, research methodology.
Двухзвенные гусеничные транспортеры (ДГТ) ОАО «МК «Витязь», предназначены для работы в особо тяжелых дорожно-климатических условиях Крайнего Севера, Заполярья и Антарктиды. Они используются для передвижения и перевозки грузов по заснеженной, болотистой, сильнопересеченной местности в экстремальных климатических условиях.[1]
Одним из направлений совершенствования ДГТ является разработка беспилотных машин. С данным направлением тесно связаны задачи исследования динамики и синтеза системы автоматического управления движением транспортера. Авторами ранее были опубликованы работы по исследованию вопросов управления транспортером. Разработаны методы исследования и синтеза гидрофицированного рулевого устройства, создана методика исследования динамики движения транспортера на плоскости [2], [3], [4]. Но движение реального объекта постоянно связано с возникновением возмущений, что обуславливает необходимость создания компенсационной системы. К тому же система управления должна быть многомерной и следящей.
Вопросы, касающиеся исследований проведенных в работе, хорошо отражены современными учеными [5,6]. Но имеющиеся разработки не подходят для рассматриваемого объекта.
Целью исследований является разработка нечеткой интеллектуальной системы управления движением транспортера как сложным объектом на основе математического имитационного моделирования и обоснование ее эффективности путем проведения численных экспериментов.
Структура исходной системы управления
Объект движения состоит из трех сепаратных подсистем и описывается тремя уравнениями (рис. 1). Два уравнения описывают возвратно-поступательное движение транспортера на плоскости, и одно уравнение описывает угловое положение транспортера. Таким образом, создание системы управления многомерным объектом можно свести к созданию двух следящих систем. Подсистема управления возвратно-поступательным движением транспортера – это, по сути, следящая система по скорости движения, так как при управлении величиной тяги гусениц, необходимо учитывать скорость движения машины.
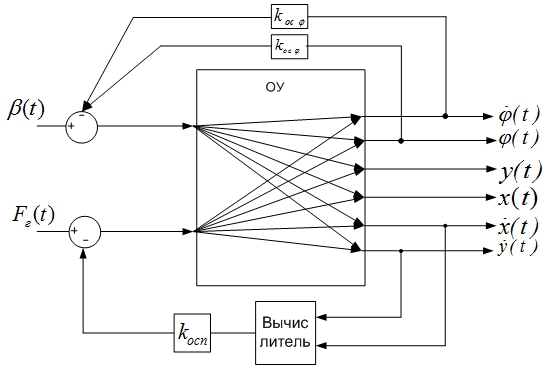
Рисунок 1. Структурная схема исходной системы управления
ОУ – объект управления, ![]() – угловое положение рулевого колеса,
– угловое положение рулевого колеса, ![]() – сила тяги гусениц,
– сила тяги гусениц, ![]() – коэффициент обратной связи поступательного движения,
– коэффициент обратной связи поступательного движения, ![]() – угловое положение транспортера относительно оси координат,
– угловое положение транспортера относительно оси координат, ![]() – выходная координата положения по оси х,
– выходная координата положения по оси х, ![]() – выходная координата положения по оси у,
– выходная координата положения по оси у, ![]() – коэффициент обратной связи по угловому положению транспортера,
– коэффициент обратной связи по угловому положению транспортера, ![]() – коэффициент обратной связи по скорости изменения углового положения транспортера
– коэффициент обратной связи по скорости изменения углового положения транспортера
Вторая простая подсистема является системой управления по угловому положению транспортера, так как угол поворота транспортера должен быть пропорционален углу поворота рулевого колеса. Для обеспечения пропорциональности скорости поворота и скорости воздействия углового положения руля необходимо предусмотреть обратную связь по скорости. Таким образом, структура базовой системы управления представлена на рисунке (1).
Интеллектуальная система управления движением транспортера
Исходная система управления и ее адекватность обоснована авторами в работе [2].
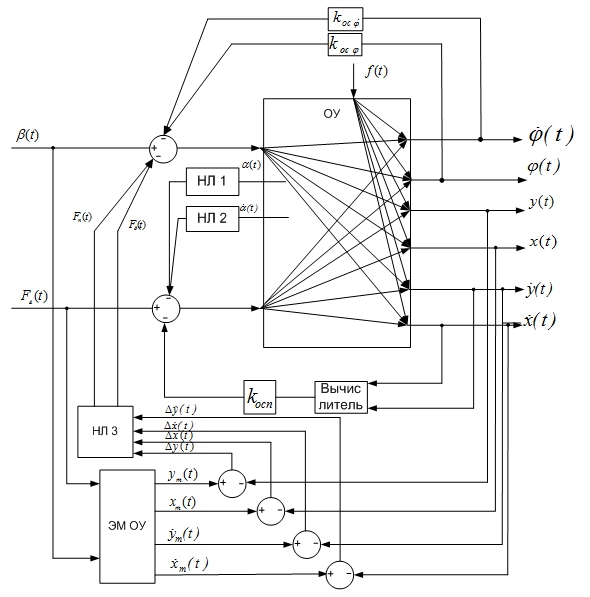
Рисунок 2. Система нечеткого управления
ЭМ ОУ – эталонная модель объекта управления, НЛ1, НЛ2 – блоки нечеткой логической связи между сепаратными подсистемами, НЛ3 – блок нечеткой логической системы компенсации возмущений, ![]() – координаты отклонения транспортера от заданной траектории,
– координаты отклонения транспортера от заданной траектории, ![]() – координата транспортера, выдаваемые эталонной невозмущенной моделью
– координата транспортера, выдаваемые эталонной невозмущенной моделью
Из экспериментов с математической моделью следует, что для улучшения динамики транспортера в исходную систему управления требуется введение дополнительных перекрестных связей между тяговой силой гусениц транспортёра и углом между кинематическими звеньями транспортера при повороте. Такая связь создаст устойчивое движение машины в случаях ухудшения сцепления гусениц с грунтом при движении в болотистой местности, при преодолении водных преград. Схема системы управления представлена на рисунке 2.
При согласовании возвратно-поступательного и вращательного движения, водитель пользуется определенной логикой. При совершении поворотов водитель притормаживает, сбрасывая скорость. При этом данную логику можно легко смоделировать с помощью базы правил нечеткой логики.
На рисунке 2 блок НЛ1 является блоком, реализующим нечеткую логическую связь между углом поворота транспортера и силой обратной связи ![]() . Водитель – эксперт также при управлении руководствуется значением скорости поворота при управлении скоростью поступательного движения. Поэтому блок НЛ2 определяет силу обратной связи в зависимости от скорости поворота.
. Водитель – эксперт также при управлении руководствуется значением скорости поворота при управлении скоростью поступательного движения. Поэтому блок НЛ2 определяет силу обратной связи в зависимости от скорости поворота.
Логика компенсационного управления транспортером при действии на него внешних возмущающих сил заключается в компенсации отклонений транспортера за счет корректировки углового положения рулевого колеса. При этом водитель при принятии решения исходит из информации о разнице заданной траектории и фактического местоположения транспортера. В качестве заданной траектории в работе выбрана траектория, выдаваемая эталонной невозмущенной моделью. Нечеткая логическая система НЛ3 на рисунке 2 сравнивает эталонные и реальные кривые и выполняет коррекцию углового положения рулевого задающего сигнала β(t) в автоматическом режиме.
Анализ эффективности логической системы управления на основе численных экспериментов
Вид входного сигнала действующего на систему по каналу угла поворота руля β(t) представлен на рис 3. В экспериментах имитируется случай с двумя циклами поворота руля. При этом цель рулевого воздействия заключается в перестройке на соседнюю полосу движения транспортера. В рамках данной статьи приводятся две серии экспериментов. Первая серия экспериментов касается обоснования необходимости обратной связи между сепаратными подсистемами (рис. 4-6). При увеличении силы тяги гусениц как следствие увеличивается скорость движения транспортера. При увеличении скорости транспортера появляется его боковой занос у(t) рис.4. Факт заноса подтверждает увеличение радиуса поворота на кривой траектории. При включении обратной интеллектуальной связи между сепаратными подсистемами радиусы поворотов уменьшаются, т.е уменьшается занос у(t). Но при этом снижается скорость движения транспортера, так как сбрасывается при поворотах. По семейству кривых видно, что коэффициент Кнл интеллектуальной обратной связи позволяет управлять углом поворота и величиной бокового заноса при заданной силе тяги гусениц.
На рисунках 5-7 представлены результаты экспериментов для анализа эффективности интеллектуальной нечеткой системы на основе эталонной модели как системы компенсации возмущающих воздействий.
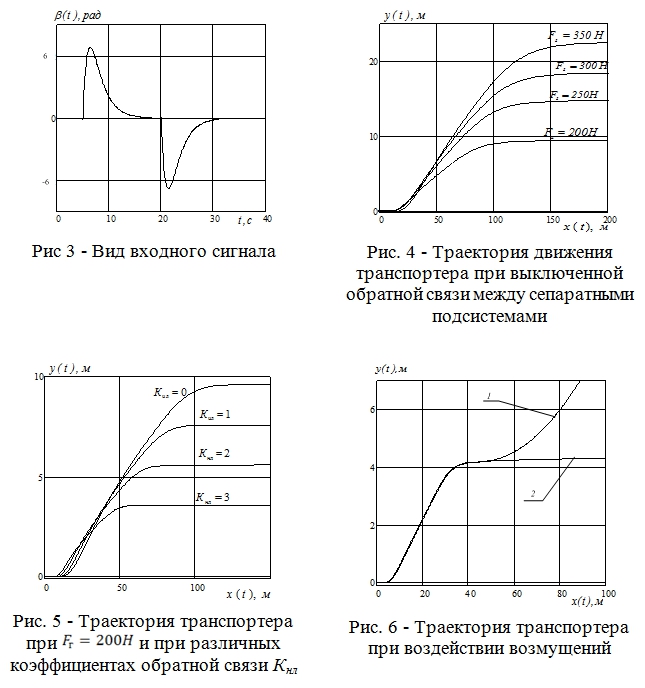
При этом возмущения в уравнениях выражены в виде ступенчатой функции. Ступенчатые функции имитируют, например, обрыв гусениц, пробуксовки и влияние силы течения при преодолении водных преград. Эти возмущения стремятся увести транспортер от заданной траектории. При имитационном моделировании ступенчатые возмущения во всех трех уравнениях движения транспортера включаются на тридцатой секунде.
Кривые (1) в рисунках 5-7 соответствуют возмущенной системе с выключенным контуром логического управления, а кривые (2) соответствуют возмущенной системе с включенным контуром интеллектуального логического управления.
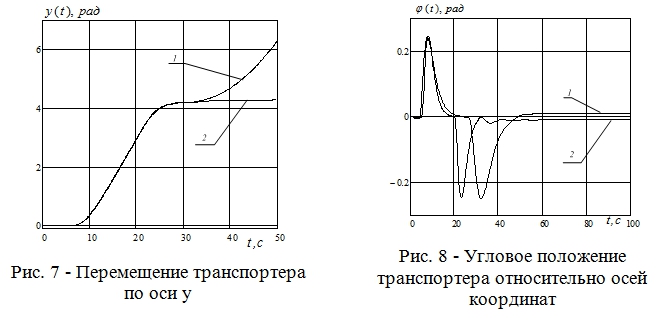
При воздействии описанных выше сил возмущения, водитель компенсирует данное возмущение некоторым углом складывания между звеньями, которая пропорциональна величине возмущения. Таким образом, интеллектуальная логическая система управления выполняет компенсацию возмущения дополнительным углом транспортера (рис. 8, кривая 2).
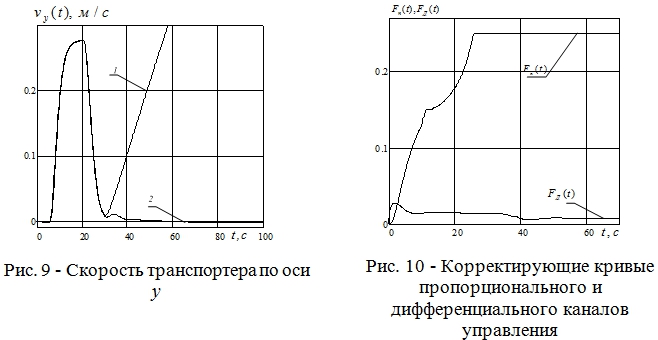
На рисунке 10 показаны изменения корректирующих сил Fп(t) и Fд(t) обратной связи сформированных не основе логической обработки НЛ 3 отклонений параметров движения возмущенного реального объекта от его эталонной невозмущенной модели.
Заключение
Применение интеллектуальной системы на основе нечеткой логики позволяет улучшить динамику движения двухзвенного гусеничного транспортера в условиях слабого сцепления гусениц с грунтом и ликвидировать статические ошибки при действии внешних возмущений.
Список литературы / References
- Ильин А.И., Целищев В.А., Пугин А.М., Хуснутдинов Д.З., Яруллин Ч.А., Сайфеев Т.Р, Сравнительный анализ нелинейностей математической модели рулевого механизма двухзвенного транспортера «Витязь» с гидравлической обратной связью // Вестник УГАТУ. – 2013. – Т. 17. – № 4 (56). – С. 167-176.
- Ильин А.И., Сайфеев Т.Р., Целищев В.А., Хуснутдинов Д.З., Яруллин Ч.А. Математическое моделирование рулевого механизма двухзвенного транспортера «Витязь» с гидравлической обратной связью // Вестник УГАТУ. – 2013. – Т. 17. – №1 (54). – С. 73–78.
- Ильясов Б.Г, Хуснутдинов Д.З., Яруллин Ч.А. Метод получения имитационных моделей движения двухзвенных гусеничных транспортеров «Витязь» // Вестник УГАТУ. – 2016. – Т. 20. – №1 (71). – С. 20–25.
- Хуснутдинов Д.З., Султанов Р.Г., Яруллин Ч.А., Ильин А.И., Сайфеев Т.Р. Анализ эффективности автоматического демпфирующего устройства гидропривода рулевого механизма двухзвенного транспортера «Витязь» // Нефтегазовое дело. – 2014. – № 12-1. – С. 149-153.
- Яцун С.Ф., Чжо Пьо Вей, Мальчиков А.В., Тарасова Е.С. Математическое моделирование мобильного гусеничного робота // Известия Юго-Западного государственного университета. – 2011. – №1 (34). – С.10-17.
- Шариков Н.В. Моделирование управляемого движения манипулятора // Известия ТулГУ. Технические науки. – 2013 – №9. – Ч 1.
Список литературы латинскими символами / References in Roman script
- Il'in A.I., Celishhev V.A., Pugin A.M., Husnutdinov D.Z., Jarullin Ch.A., Sajfeev T.R, Sravnitel'nyj analiz nelinejnostej matematicheskoj modeli rulevogo mehanizma dvuhzvennogo transportera «Vitjaz'» s gidravlicheskoj obratnoj svjaz'ju [The comparative analysis of nonlinearities of a mathematical model of the steering mechanism of twotrack crawler transporter "Vityaz" with hydraulic feedback] // Vestnik UGATU [Ufa State Aviation Technical University Bulletin]. – 2013. – V. 17. – № 4 (56). – P. 167–176.
- Il'in A.I., Sajfeev T.R., Celishhev V.A., Husnutdinov D.Z., Jarullin Ch.A. Matematicheskoe modelirovanie rulevogo mehanizma dvuhzvennogo transportera «Vitjaz'» s gidravlicheskoj obratnoj svjaz'ju [Mathematical modeling of the steering mechanism of two track crawler transporter "Vityaz" with hydraulic feedback] // Vestnik UGATU [Ufa State Aviation Technical University Bulletin]. – 2013. – V. 17. – №1 (54). – P. 73–78.
- Il'jasov B.G, Husnutdinov D.Z., Jarullin Ch.A. Metod poluchenija imitacionnyh modelej dvizhenija dvuhzvennyh gusenichnyh transporterov «Vitjaz'» [Method of receiving simulation models of movement of twotrackcrawler transporter "Vityaz"] // Vestnik UGATU [Ufa State Aviation Technical University Bulletin]. – 2016. – V. 20. – № 1 (71). – P. 20–25.
- Husnutdinov D.Z., Sultanov R.G., Jarullin Ch.A., Il'in A.I., Sajfeev T.R. Analiz jeffektivnosti avtomaticheskogo dempfirujushhego ustrojstva gidroprivoda rulevogo mehanizma dvuhzvennogo transportera «Vitjaz'» [The analysis of efficiency of the automatic damping hydraulic actuator device of the steering mechanism of twotrackcrawler transporter "Vityaz"] // Neftegazovoe delo [Oil and gas business]. – 2014. – № 12-1. – P. 149-153.
- Jacun S.F., Chzho P'o Vej, Mal'chikov A.V., Tarasova E.S. Matematicheskoe modelirovanie mobil'nogo gusenichnogo robota [Mathematical modeling of the mobile caterpillar robot] // Izvestija Jugo-Zapadnogo gosudarstvennogo universiteta [Proceedings of the Southwest State University]. – 2011. – № 1 (34). – P.10-17.
- Sharikov N.V. Modelirovanie upravljaemogo dvizhenija manipuljatora [Modeling of controlled movement of the pointing device] // Izvestija TulGU. Tehnicheskie nauki [Proceedings of Tula State University. Technical Sciences]. – 2013 – № 9. – P 1.