Использование сверточных нейронных сетей для удаления шума и восстановления изображений в медицинской и телеметрической практике
Использование сверточных нейронных сетей для удаления шума и восстановления изображений в медицинской и телеметрической практике
Аннотация
В статье рассматривается задача удаления шума и восстановления изображений в медицинской и телеметрической практике. Целью исследования является разработка метода фильтрации зашумленных данных на основе сверточного автоэнкодера, позволяющего повысить качество визуальной информации. В работе проведён сравнительный анализ традиционных методов обработки изображений и современных нейросетевых подходов. В экспериментальной части использованы наборы микроскопических изображений и данные бортовой системы видеоконтроля (БСВК) ракеты-носителя. Предложенная архитектура автоэнкодера продемонстрировала преимущество по метрикам PSNR и SSIM по сравнению с классическими алгоритмами фильтрации. Научная новизна работы заключается в том, что впервые сверточный автоэнкодер применён одновременно к задаче фильтрации медицинских изображений и данных БСВК в единой постановке. Практическая значимость исследования состоит в возможности использования предложенного подхода для повышения достоверности телеметрической информации и качества диагностических изображений.
1. Введение
В последние десятилетия наблюдается устойчивый рост интереса к методам цифровой обработки изображений, обусловленный широким спектром их применения: от медицинской диагностики до промышленного контроля качества и обработки телеметрических данных с космических аппаратов. Качество изображений напрямую влияет на точность последующего анализа и принятие решений, что делает задачу восстановления изображений, в частности устранения шума, актуальной и практически значимой.
Шум в изображениях представляет собой нежелательное искажение визуальной информации, возникающее как в процессе формирования изображения (например, вследствие ограничений чувствительности сенсоров, квантовых флуктуаций и оптических аберраций), так и на этапах его передачи, хранения и реконструкции. В зависимости от физических и технических факторов, шум может носить гауссовский, импульсный, мультипликативный или комбинированный характер. Присутствие шума затрудняет интерпретацию изображений как специалистами, так и автоматизированными системами анализа, особенно в случаях, требующих высокой пространственной точности и сохранения тонких структурных элементов.
Существующие классические методы подавления шума, включая линейные и нелинейные фильтры (фильтр Гаусса, медианный фильтр, фильтр Винера и др.), обеспечивают определённый уровень устранения шумов, однако зачастую сопровождаются утратой пространственной детализации, нарушением структурной целостности изображения и введением артефактов . Указанные ограничения особенно критичны при работе с медицинскими и телеметрическими изображениями, где важна не только высокая степень шумоподавления, но и сохранение анатомических или технически значимых особенностей изображения.
В контексте указанных ограничений перспективным направлением представляется использование методов глубинного обучения, в частности — сверточных нейронных сетей (CNN), демонстрирующих высокую способность к аппроксимации сложных нелинейных зависимостей и автоматическому извлечению признаков. Обучение нейросетевых моделей на парах зашумленных и эталонных изображений позволяет формировать устойчивые аппроксиматоры, способные восстанавливать оригинальное изображение даже при наличии выраженных искажений . Среди эффективных архитектур, применяемых для решения задач восстановления изображений, особое внимание уделяется автоэнкодерам, U-Net и их модификациям, отличающимся высокой точностью реконструкции, модульностью и возможностью масштабирования.
Применение нейросетевых подходов к задаче шумоподавления обладает рядом преимуществ: во-первых, такие модели адаптируются к статистике конкретных типов шума и особенностям визуального содержания; во-вторых, они демонстрируют способность к обобщению на новые типы данных при наличии ограниченного обучающего множества; в-третьих, обеспечивают высокое качество восстановления, превосходящее традиционные алгоритмы по объективным метрикам качества, таким как PSNR (Peak Signal-to-Noise Ratio), SSIM (Structural Similarity Index Measure) и MSE (Mean Squared Error).
Важным аспектом, требующим отдельного рассмотрения, является интерпретируемость нейросетевых решений, особенно в медицинских и аэрокосмических приложениях, где непредсказуемое поведение модели может привести к искажённым выводам. В связи с этим особую актуальность приобретает исследование устойчивости нейросетевых моделей к изменениям характеристик входных данных, а также разработка архитектур, обеспечивающих прозрачность и воспроизводимость результатов.
Настоящее исследование направлено на обоснование эффективности использования нейронных сетей для задач подавления шумов и восстановления изображений в прикладных контекстах медицины и телеметрии. В работе производится анализ архитектурных особенностей различных типов нейросетей (включая автоэнкодеры и U-Net), осуществляется обучение моделей на синтетических и реалистичных датасетах, имитирующих различные типы шумов и искажений, и проводится их сравнение с классическими алгоритмами фильтрации . Эффективность рассматриваемых решений оценивается с использованием стандартных метрик качества восстановления и анализируется с позиций их применимости в условиях реальных задач — например, в автоматизированной обработке микроскопических медицинских изображений или телеметрических снимков с борта космических аппаратов.
Таким образом, использование сверточных нейронных сетей в задачах шумоподавления представляет собой научно обоснованный и технически эффективный подход, позволяющий обеспечить высокую точность восстановления изображений при сохранении их информативной структуры. Результаты настоящей работы вносят вклад в развитие интеллектуальных систем визуального анализа и могут быть использованы при проектировании прикладных решений в области медицинской диагностики, аэрокосмического мониторинга и смежных дисциплин.
2. Традиционные и нейросетевые методы удаления шума
Удаление шума (денойзинг) является одной из важнейших задач цифровой обработки изображений, особенно в тех случаях, когда от качества изображения зависит корректность последующего анализа. Шум может существенно снижать информативность изображения, затруднять распознавание объектов, ухудшать визуальное восприятие и мешать автоматизированной обработке. Это особенно критично в таких областях, как медицинская диагностика, биомедицинская визуализация, дистанционное зондирование Земли, а также в телеметрических и научных изображениях, полученных в условиях высокой чувствительности и низкой освещённости.
Характер шума может варьироваться в зависимости от источника его возникновения. Наиболее распространёнными являются следующие типы:
- Гауссовский шум, моделирующий случайные отклонения яркости, возникающие из-за тепловых и электронных колебаний.
- Импульсный шум («соль и перец»), возникающий при передаче данных или неисправности сенсора.
- Шум Пуассона, характерный для изображений при низкой освещённости и в медицинской визуализации.
- Мультипликативный шум, часто встречающийся в радиолокационных и ультразвуковых изображениях.
Существующие методы удаления шума можно разделить на две большие категории: традиционные (алгоритмические) и обучаемые (нейросетевые) .
2.1. Традиционные методы
Традиционные методы фильтрации изображений основываются на априорных предположениях о природе шума и структуре изображения. Они, как правило, не требуют предварительного обучения и применяются напрямую к входным данным. Ниже рассмотрены основные фильтры, применяемые для подавления различных типов шума.
2.1.1. Гауссов фильтр
Гауссов фильтр представляет собой линейную свёртку изображения с ядром, основанным на двумерной функции Гаусса:
где G(x,y) — ядро фильтра в точке (x,y);
q — дисперсия (параметр «размытия»), определяющая степень сглаживания;
x,y — координаты пикселей относительно центра окна фильтра.
Фильтр эффективно подавляет аддитивный гауссовский шум и мелкие флуктуации яркости за счёт усреднения значений пикселей с учётом их пространственной близости.
Преимущества:
- простота реализации и высокая скорость выполнения;
- хорошо подавляет равномерный шум при относительно слабом размывании.
Недостатки:
- размывает границы и тонкие структуры;
- неэффективен при наличии импульсного шума.
2.1.2. Медианный фильтр
Вместо среднего значения пикселя в окрестности используется медиана, то есть центральное значение отсортированного по яркости списка соседей.
Эффективен для устранения импульсного шума, при котором отдельные пиксели резко отличаются по яркости от окружения.
Преимущества:
- сохраняет резкие границы объектов;
- не приводит к смещению значений, как это происходит при усреднении.
Недостатки:
- меньшая эффективность при гауссовском или комплексном шуме;
- при увеличении окна может исказить структуру изображения.
2.1.3. Фильтр Винера (Wiener filter)
Является адаптивным фильтром, основанным на оценке локальной дисперсии и среднего значения. Предполагается, что сигнал и шум можно статистически различить. Осуществляется частотная фильтрация с подавлением частот, на которых преобладает шум.
Формула фильтра Винера в частотной области:
где H(u,v) — частотная характеристика фильтра Винера;
S(u,v) — спектральная плотность мощности исходного (чистого) изображения;
N(u,v) — спектральная плотность мощности шума;
u,v — координаты в частотной области (Фурье-пространство).
Предназначен для уменьшения шума при сохранении резкости. Особенно эффективен при известной спектральной плотности шума.
Преимущества:
- адаптивность к локальным условиям изображения;
- улучшение как шума, так и размытости (дефокусировки).
Недостатки:
- требует предварительной оценки шума и сигнала;
- может усиливать артефакты при неправильных параметрах.
2.1.4. Билатеральный фильтр (Bilateral filter)
Фильтр сочетает два весовых коэффициента: пространственный и радиометрический (по яркости):
, где I(x) — интенсивность пикселя в точке x;
I^'(x) — новая (отфильтрованная) интенсивность;
W — коэффициент нормализации (сумма весов);
b — окрестность пикселя;
q_s и q_r — управляют пространственным и яркостным сглаживанием соответственно по расстоянию между пикселями и по разнице яркостей.
Сохраняет контуры и границы при сглаживании текстур. Подходит для изображений с переменным уровнем шума.
Преимущества:
- эффективен для устранения мелких флуктуаций при сохранении краёв;
- адаптивен к содержанию изображения.
Недостатки:
- вычислительно затратен;
- неустойчив к сильному шуму.
2.1.5. Нелокальные методы: Non-Local Means (NLM)
NLM-фильтр заменяет значение пикселя усреднённым значением других пикселей, находящихся в изображении, вес которых зависит от схожести их окрестностей, а не только от пространственной близости:
где I(x) — интенсивность пикселя в точке x;
I^'(x) — новая (взвешенная) интенсивность;
w(x,y) — вес, зависящий от сходства окрестностей вокруг пикселей xxx и yyy (чем похожее окружение, тем выше вес);
b — множество пикселей всего изображения или выбранного окна.
Предназначен для высокоточного шумоподавления без потери деталей. Особенно эффективен на текстурированных и повторяющихся структурах.
Преимущества:
- отлично сохраняет структуру и детали;
- работает на основе глобального контекста изображения.
Недостатки:
- очень высокая вычислительная сложность;
- медленная работа на больших изображениях без оптимизации.
Таким образом, в таблице 1 представлено обобщение по фильтрам, которые применяются для различных типов шумов.
Таблица 1 - Обобщение по традиционным фильтрам
№ п/п | Метод | Эффективен против шума | Сохраняет детали | Вычисления | Примечание |
1 | Гауссов фильтр | Гауссовский | Частично | Быстрый | Универсальное сглаживание |
2 | Медианный фильтр | Импульсный | Хорошо | Быстрый | Предобработка, диагностика |
3 | Фильтр Винера | Гаусс, размытость | Средне | Средний | Частотная фильтрация, восстановление фокуса |
4 | Билатеральный фильтр | Гаусс, слабый шум | Хорошо | Средний | Медицинские изображения, HDR |
5 | Нелокальные методы | Разнотипный | Очень хорошо | Дорогой | Критичные задачи (медицина, наука) |
Хотя классические методы остаются актуальными благодаря своей интерпретируемости и простоте, они часто демонстрируют ограниченные возможности при работе с реальными изображениями, где шум имеет сложную и неоднородную структуру. Кроме того, их параметры обычно подбираются вручную и не адаптируются к особенностям конкретного изображения.
2.2. Обучаемые (нейросетевые) методы
Современные достижения в области машинного обучения и компьютерного зрения способствовали широкому распространению нейросетевых подходов к обработке изображений. В частности, нейросетевые методы продемонстрировали высокую эффективность в задаче подавления шума, особенно в случаях, когда традиционные фильтры теряют точность или создают нежелательные искажения. Благодаря способности обучаться на больших выборках данных, такие модели могут учитывать сложные нелинейные зависимости и адаптироваться к различным видам шумов, сохраняя при этом важные детали изображения.
2.2.1. Сверточные нейронные сети (CNN) для удаления шума
Сверточные нейронные сети (Convolutional Neural Networks, CNN) являются основным инструментом для анализа изображений в нейросетевых архитектурах . Их ключевая особенность — способность автоматически извлекать пространственные признаки с помощью обучаемых свёрточных фильтров. В задаче денойзинга CNN обучаются преобразовывать зашумлённое изображение в его «чистую» версию.
Примеры архитектур:
- DnCNN (Denoising Convolutional Neural Network) — одна из первых глубоко сверточных моделей для подавления шума (использует несколько сверточных слоёв с batch normalization и ReLU, а обучается предсказывать не само изображение, а остаток шума, который затем вычитается);
- FFDNet — улучшенная архитектура, принимающая уровень шума как входной параметр, что позволяет фильтровать изображения с переменным уровнем зашумлённости;
- RED-Net (Residual Encoder-Decoder Network) — использует симметричную структуру автоэнкодера с прямыми остаточными связями между слоями кодировщика и декодировщика.
2.2.2. Автоэнкодеры
Автоэнкодеры — это тип нейронной сети, обучающийся восстанавливать входные данные через узкое «бутылочное горлышко» (сжатое представление). В задаче удаления шума используется денойзинг-автоэнкодер (Denoising Autoencoder), который принимает зашумлённое изображение на вход и обучается восстанавливать исходное (чистое) изображение на выходе.
Особенности:
- простота архитектуры;
- хорошо работают с ограниченным числом типов шума.
Но в силу своих особенностей также ограничены в способности к генерализации на более сложные случаи без дополнительных компонентов.
2.2.3. Архитектура U-Net
Изначально предложенная для задач биомедицинской сегментации, архитектура U-Net зарекомендовала себя и в задачах денойзинга. Её структура состоит из симметричного кодировщика и декодировщика, объединённых пропусками между соответствующими слоями. Это позволяет эффективно восстанавливать детали изображения, особенно при слабом сигнале.
Преимущества U-Net:
- сохраняет пространственные признаки даже при сильной компрессии;
- отлично справляется с текстурными и контурными структурами;
- подходит для малошумных и сильно зашумлённых изображений.
2.2.4. GAN для удаления шума
Генеративно-состязательные сети (GAN) используются не только для генерации изображений, но и для улучшения их качества. В контексте денойзинга применяется подход, при котором генератор создаёт очищенное изображение, а дискриминатор определяет, насколько оно «реалистично».
Примеры:
Noise2Noise, Noise2Void, Noise2Self — архитектуры, обучающиеся без чистых эталонных изображений, что особенно полезно в медицине и астрофизике, где чистые данные получить трудно.
Плюсы:
- GAN-сети способны создавать фотореалистичные результаты.
- могут обобщать сложные текстуры и шумовые характеристики.
Минусы:
- трудны в обучении;
- подвержены нестабильности и эффекту «галлюцинаций» (генерации деталей, которых изначально не было).
2.2.5. Transformer-базированные архитектуры
В последние годы получили распространение визуальные трансформеры (ViT) и гибридные модели, сочетающие CNN и self-attention. Их преимущество — способность учитывать глобальный контекст изображения.
Примеры:
Restormer — модель, использующая модифицированный self-attention для восстановления изображений с шумами и артефактами.
Uformer — гибридный денойзер, объединяющий свёртки и трансформеры.
В таблице 2 представлено сравнение нейросетевых подходов в обработке изображений.
Таблица 2 - Сравнение нейросетевых подходов
№ п/п | Метод | Преимущества | Недостатки | Применение |
1 | DnCNN | Высокая точность, простота | Требует чистых пар изображений | Универсальный денойзинг |
2 | Autoencoder | Быстрая и лёгкая реализация | Ограниченная гибкость | Простые задачи фильтрации |
3 | U-Net | Отличное восстановление деталей | Большой размер модели | Медицинские и спутниковые снимки |
4 | GAN | Реалистичные результаты | Трудность обучения | Эстетическая обработка, восстановление |
5 | Transformers | Учёт глобального контекста | Высокая вычислительная нагрузка | Критические и шумные данные |
Преимущества нейросетевых методов заключаются в их способности адаптироваться к структуре шума и эффективно работать в условиях слабоконтрастных и сильно искажённых изображений. Однако такие методы требуют значительных вычислительных ресурсов, наличия обучающей выборки и тщательной настройки архитектуры .
3. Сверточный автоэнкодер
Для решения задачи удаления шума и восстановления изображений в данной работе предлагается использовать сверточный автоэнкодер. Данный класс нейросетевых архитектур сочетает преимущества сверточных сетей в извлечении пространственных признаков и автоэнкодеров в сжатии и восстановлении информации.
Архитектура модели включает два основных компонента :
- Кодировщик (encoder) — последовательно применяет свёрточные слои с функцией активации ReLU и операции субдискретизации (max pooling), формируя компактное представление входного изображения. Его задача заключается в выделении ключевых признаков изображения при одновременном снижении размерности данных.
- Декодировщик (decoder) — симметричная часть сети, восстанавливающая изображение из сжатого представления. Для увеличения пространственного разрешения применяются операции upsampling или транспонированные свёртки (deconvolution).
- Код (Latent space / Bottleneck) — центральный слой («бутылочное горлышко»), содержащий сжатое представление входных данных. На этом уровне сохраняется только наиболее существенная информация, необходимая для восстановления исходного изображения.
Схематично структура автоэнкодера представлена на рисунке 1 .
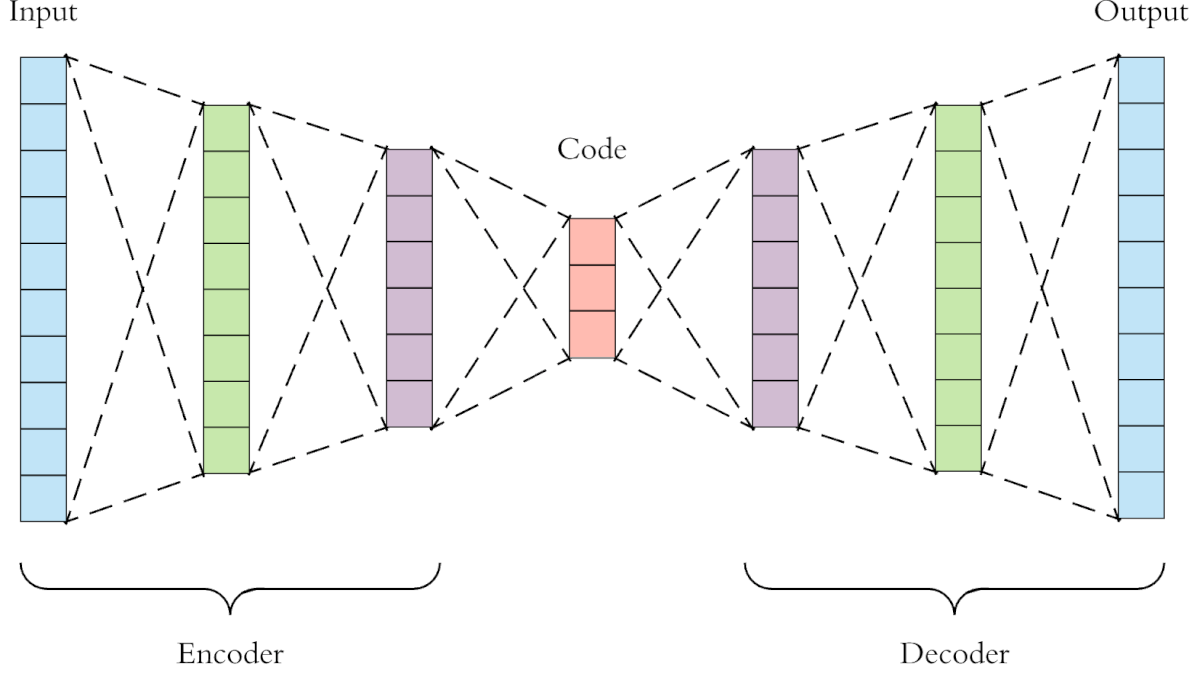
Рисунок 1 - Структура автоэнкодера
Подробная структура предлагаемой архитектуры приведена в таблице 3.
Таблица 3 - Архитектура предложенного сверточного автоэнкодера
Блок | Слой | Параметры | Размер выхода |
Вход | Входной слой | 128×128×1 (градации серого) | 128×128×1 |
Кодировщик-1 | Свёрточный слой + ReLU | 32 фильтра, размер ядра 3×3, режим «same» | 128×128×32 |
- | MaxPooling | окно 2×2 | 64×64×32 |
Кодировщик-2 | Свёрточный слой + ReLU | 64 фильтра, размер ядра 3×3 | 64×64×64 |
- | MaxPooling | окно 2×2 | 32×32×64 |
Узкое место (bottleneck) | Свёрточный слой + ReLU | 128 фильтров, размер ядра 3×3 | 32×32×128 |
Декодировщик-1 | Транспонированная свёртка + ReLU | 64 фильтра, размер ядра 3×3, шаг 2 | 64×64×64 |
Декодировщик-2 | Транспонированная свёртка + ReLU | 32 фильтра, размер ядра 3×3, шаг 2 | 128×128×32 |
Выход | Свёрточный слой + Sigmoid | 1 фильтр, размер ядра 3×3, режим «same» | 128×128×1 |
Архитектура реализована в среде PyTorch. В качестве функции активации использована ReLU во внутренних слоях и Sigmoid на выходе. Применялись методы регуляризации: Dropout (0,2) в узком месте и Batch Normalization после свёрточных слоёв. Для оптимизации обучения использован алгоритм Adam со скоростью обучения 1·10⁻³, инициализация весов выполнена по методу Xavier uniform.
4. Экспериментальная часть
Экспериментальные исследования направлены на проверку гипотезы о том, что использование сверточного автоэнкодера обеспечивает более высокое качество восстановления изображений по сравнению с традиционными методами фильтрации и рядом современных нейросетевых архитектур. Основными задачами эксперимента являются:
- количественная оценка эффективности автоэнкодера при удалении различных типов шума;
- сравнение результатов с классическими методами обработки (Гауссов фильтр, медианный фильтр, фильтр Винера, билатеральный фильтр, Non-Local Means);
- сопоставление с современными архитектурами глубокого обучения (DnCNN, U-Net);
- анализ применимости предложенного подхода к медицинским и телеметрическим данным.
Для обеспечения воспроизводимости эксперимента параметры классических фильтров были зафиксированы в таблице 4.
Таблица 4 - Конфигурации классических методов фильтрации
Метод | Установленные параметры |
Гауссов фильтр | окно 5×5, σ = 1,0 |
Медианный фильтр | окно 3×3 |
Фильтр Винера | окно 5×5, оценка дисперсии шума σ² = 0,01 |
Билатеральный фильтр | радиус = 5, σₛ = 2, σᵣ = 0,1 |
Non-Local Means | размер патча 7×7, окно поиска 21×21, коэффициент сглаживания h = 10 |
Основные параметры используемых нейросетевых моделей представлены в таблице 5.
Таблица 5 - Основные параметры сравниваемых нейросетевых моделей
Модель | Архитектура | Характеристики обучения |
DnCNN | 17 свёрточных слоёв (64 фильтра 3×3, Batch Normalization, ReLU); выход — остаточный шум | CIFAR-10 (40 тыс. обучающая выборка, 10 тыс. валидационная); Adam (lr = 1·10⁻³); 50 эпох |
U-Net | 4 блока кодировщика и 4 блока декодировщика; наличие skip-соединений; число фильтров: 32–64–128–256 | CIFAR-10 и реальные данные; Adam (lr = 1·10⁻⁴); 60 эпох |
Autoencoder (предложенный) | см. таблицу 3 | CIFAR-10 и реальные данные; Adam (lr = 1·10⁻³); 80 эпох |
Для проведения экспериментов были использованы два типа данных:
1. Синтетические наборы изображений:
- набор CIFAR-10 (60 000 изображений 32×32),
- дополнительно сформированный набор искусственно зашумлённых изображений стандартных тестовых картинок (Lena, Barbara, Cameraman, Peppers и др.).
Для обучения использовалось 40 000 изображений, для валидации — 10 000 изображений, для тестирования — 10 000 изображений.
2. Реальные данные:
- 120 микроскопических изображений биологических образцов, предоставленных Бюро судебно-медицинской экспертизы г. Байконур;
- 80 телеметрических кадров с бортовой системы видеоконтроля (БСВК) ракеты-носителя «Союз-2.1а», включая изображения при различных условиях освещённости и передачи.
Все изображения были нормализованы до диапазона [0,1] и масштабированы до 128×128 пикселей.
Предложенный автоэнкодер обучался на совокупности синтетических и реальных данных с использованием следующей конфигурации:
- оптимизатор: Adam, скорость обучения 1e-3;
- количество эпох: 80;
- размер батча: 32;
- функция потерь: среднеквадратическая ошибка (MSE);
- аппаратная платформа: графический ускоритель NVIDIA RTX (8 ГБ).
Для объективной оценки качества восстановления изображений использовались следующие показатели:
- MSE (Mean Squared Error) — отражает среднюю квадратическую ошибку между эталонным и восстановленным изображением. Выбран как базовый критерий количественного сравнения.
- PSNR (Peak Signal-to-Noise Ratio) — характеризует отношение мощности сигнала к мощности шума. Используется в задачах обработки изображений как стандартная метрика качества.
- SSIM (Structural Similarity Index) — оценивает структурное сходство между изображениями с учётом яркости, контраста и текстурных особенностей. Включена в эксперимент, так как именно она наиболее полно соответствует восприятию изображений человеком.
Таким образом, комбинация MSE, PSNR и SSIM позволяет комплексно оценить эффективность метода: от точности числового совпадения до сохранения визуальных и структурных характеристик.
Для повышения достоверности результатов была проведена статистическая обработка экспериментальных данных.
Пример усреднённых показателей и разброса значений (стандартное отклонение) приведён в таблице 6.
Таблица 6 - Средние значения и разброс метрик по тестовой выборке
Метод | MSE (ср.) | MSE (σ) | PSNR (ср.) | PSNR (σ) | SSIM (ср.) | SSIM (σ) |
Гауссов фильтр | 0,0152 | 0,0021 | 26,8 | 1,4 | 0,74 | 0,05 |
Медианный фильтр | 0,0129 | 0,0019 | 27,5 | 1,2 | 0,77 | 0,04 |
Фильтр Винера | 0,0108 | 0,0017 | 28,3 | 1,0 | 0,79 | 0,03 |
Non-Local Means | 0,0078 | 0,0012 | 30,4 | 0,9 | 0,85 | 0,02 |
U-Net | 0,0061 | 0,0008 | 32,1 | 0,7 | 0,90 | 0,01 |
втоэнкодер (CNN) | 0,0056 | 0,0006 | 32,7 | 0,6 | 0,91 | 0,01 |
Анализ таблицы показывает, что автоэнкодер демонстрирует не только минимальное среднее значение MSE, но и наименьшее стандартное отклонение по всем метрикам, что указывает на устойчивость модели к вариациям входных данных.
Задача повышения качества изображений приобретает особую значимость в прикладных областях, связанных с обработкой телеметрических данных, получаемых с бортовых камер, а также микроскопических изображений, используемых в экспертной и медицинской практике. Кроме численных метрик, были получены визуальные результаты (рисунки 2 – 5), демонстрирующие восстановление изображений, поврежденных гауссовским и импульсным шумом.
В рамках данного исследования в качестве источника реальных данных были использованы микроскопические изображения легких, предоставленные Бюро судебно-медицинской экспертизы г. Байконур (рисунки 2, 3). Визуальный анализ подтверждает, что предложенный автоэнкодер лучше сохраняет границы объектов и текстурные структуры по сравнению с традиционными фильтрами.
На рисунках 2 и 3 изображены микроскопические снимки легких до и после фильтрации.
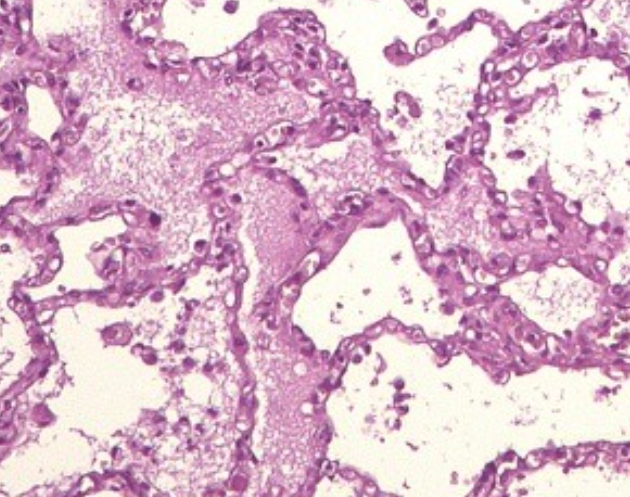
Рисунок 2 - Изображение до фильтрации
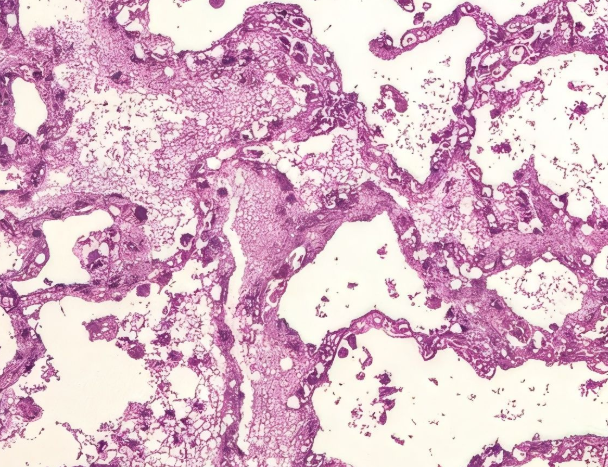
Рисунок 3 - Изображение после фильтрации
Однако на практике получаемые изображения часто характеризуются наличием различных искажений — шумов, размытости, пониженного контраста и других артефактов, обусловленных как техническими ограничениями микроскопического оборудования, так и условиями съёмки. Эти факторы затрудняют визуальную интерпретацию и автоматизированную обработку изображений, снижая точность диагностических и экспертных выводов.
Помимо анализа качества восстановления микроскопических изображений, особый интерес представляет применение предложенного подхода к задачам обработки телеметрической информации. В частности, рассмотрен пример изображений, полученных с бортовой системы видеоконтроля (БСВК) ракетно-космического комплекса.
Телеметрические кадры характеризуются низким уровнем сигнала, наличием различных видов шумов и искажений, обусловленных условиями передачи и особенностями аппаратуры. Эти факторы затрудняют последующую интерпретацию и могут приводить к потере критически важной информации о техническом состоянии ракеты-носителя.
Применение сверточного автоэнкодера для фильтрации изображений БСВК позволяет не только уменьшить уровень шума, но и сохранить структурно значимые элементы изображения (контуры конструктивных узлов, мелкие детали), что существенно повышает достоверность анализа.
На рисунках 4 и 5 представлены снимки с бортовой системы видеоконтроля (БСВК) ракеты-носителя «Союз – 2.1а», выполненные 28 апреля 2016 года. Рисунки соответственно до и после фильтрации. Видно, что предложенный метод обеспечивает подавление шума при одновременном сохранении информативного содержимого изображения.

Рисунок 4 - Запуск РН «Союз – 2.1а» 28.04.2016. Кадр до обработки

Рисунок 5 - Кадр после обработки
5. Результаты и их анализ
Для оценки качества фильтрации выбран метод среднеквадратической ошибки (MSE), который измеряет разницу между оригинальным и отфильтрованным изображением. Чем меньше значение MSE, тем лучше качество фильтрации.
где N — общее количество пикселей, I_ориг – интенсивность пикселя в оригинале, I_фильтр,i — интенсивность пикселя в обработанном изображении.
Результаты оценки качества фильтрации представлены на рисунке 6.
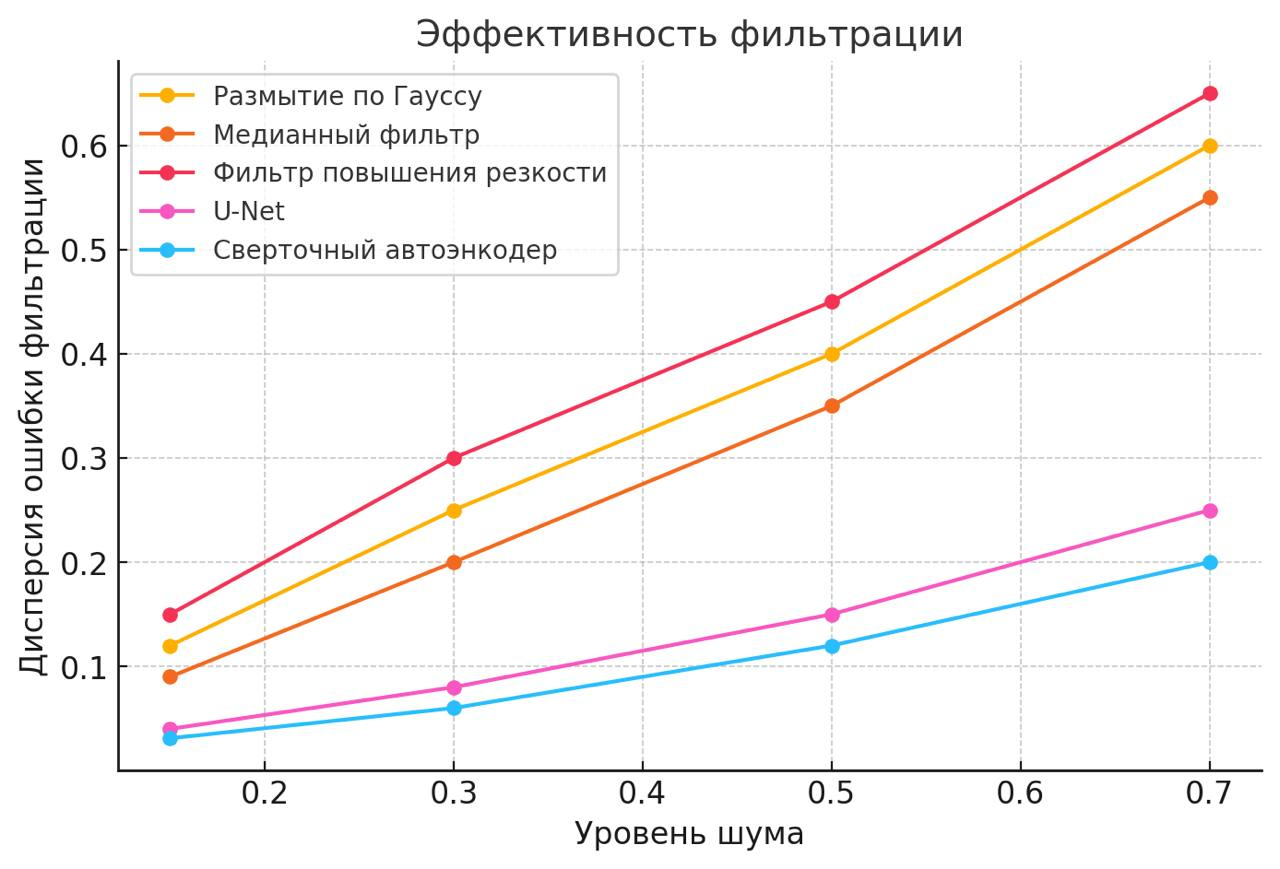
Рисунок 6 - Оценка качества фильтрации
Помимо метрик качества (MSE, PSNR, SSIM), оценивались временные ресурсы обучения и обработки изображений. Результаты приведены в таблице 7.
Таблица 7 - Временные ресурсы обучения и обработки изображений
Модель | Число эпох | Общее время обучения мин | Среднее время одной эпохи, мин | Среднее время обработки одного изображения (128×128 пикселей), мс |
Autoencoder (предложенный) | 80 | 570 | 7 | 3,4 |
U-Net | 60 | 852 | 14 | 7,9 |
DnCNN | 50 | 468 | 9 | 5,1 |
Сравнительный анализ временных характеристик показал, что предложенный сверточный автоэнкодер требует меньше времени на обучение и демонстрирует более быстрое время обработки изображений по сравнению с архитектурой U-Net. По сравнению с архитектурой DnCNN показал наилучшее среднее время обработки одного изображения. Таким образом, модель обладает не только высоким качеством восстановления, но и высокой вычислительной эффективностью, что особенно важно в задачах обработки телеметрических и медицинских изображений в условиях ограниченных ресурсов.
6. Заключение
В ходе исследования проведён анализ традиционных и современных методов удаления шума и восстановления изображений в задачах медицинской диагностики и обработки телеметрических данных. Рассмотрены основные алгоритмические подходы (Гауссов фильтр, медианный фильтр, фильтр Винера, билатеральный фильтр, метод Non-Local Means), а также архитектуры глубокого обучения (DnCNN, автоэнкодеры, U-Net, GAN, трансформер-базированные модели).
Результаты экспериментов на синтетических и реальных данных (микроскопические изображения и телеметрические кадры) показали, что сверточный автоэнкодер обеспечивает наименьшее значение MSE и более высокие значения PSNR и SSIM по сравнению с традиционными методами. Это подтверждает его эффективность в задачах восстановления изображений при сохранении структурных деталей и снижении уровня артефактов.
Научная новизна работы: впервые предложено применение сверточного автоэнкодера для единой постановки задачи фильтрации изображений в двух прикладных областей — медицинской визуализации (микроскопические снимки) и телеметрической практике (кадры БСВК). Практическая значимость исследования заключается в возможности внедрения предложенного подхода в системы автоматизированного анализа медицинских данных и обработки телеметрических изображений, получаемых с бортовых камер космических аппаратов.
Дальнейшие исследования планируется направить на использование гибридных архитектур (U-Net + трансформеры), а также на обучение моделей с применением безэталонных методов (Noise2Noise, Noise2Void), что позволит расширить область применения нейросетевых решений при ограниченной доступности чистых данных.