СРАВНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ МЕТОДОВ НАСТРОЙКИ РЕГУЛЯТОРОВ В ДВУХКОНТУРНОЙ СИСТЕМЕ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Сташинов Ю.П.1, Минакова В. О.2
1ORCID: 0000-0001-7556-8547, Кандидат технических наук. 2Студент
Шахтинский институт (филиал) Южно-Российского государственного политехнического университета (Новочеркасского политехнического института) имени М.И. Платова
СРАВНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ МЕТОДОВ НАСТРОЙКИ РЕГУЛЯТОРОВ В ДВУХКОНТУРНОЙ СИСТЕМЕ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Аннотация
Приведены результаты компьютерного моделирования в Scilab двухконтурной системы управления электропривода постоянного тока при различных методах настройки регуляторов скорости и тока. Исследовались переходные процессы при пуске электропривода и набросе нагрузки с определением времени регулирования и перерегулирования. Анализ полученных результатов показал, что наилучшие показатели качества переходных процессов обеспечивает структура системы управления с ПИ-регулятором скорости и П-регулятором тока, являющаяся результатом настройки на оригинальный модульный оптимум, предложенный Кесслером, при одновременном учёте задающего и возмущающего воздействий.
Ключевые слова: электропривод постоянного тока, настройка регуляторов.
Stashinov Yu.P.1, Мinakova V.О.2
1ORCID: 0000-0001-7556-8547, PhD in ingineering, 2student,
Shakhty Institute (Branch) of South-Russian State Politechnic University (Novocherkassk Polytechnic Institute) by M.I. Platov
COMPARATIVE RESEARCH OF METHODS OF REGULATORS ADJUSTMENT IN THE TWO-LOOP CONTROL SYSTEM OF DC ELECTRIC DRIVE
Abstract
Results of computer simulation in Scilab of a two-loop control system of DC electric drive are given at various methods of adjusting speed and current regulators. Transition processes at electric drive starting and step increase of load were investigated with determination of transient time and overshooting. The analysis of the received results has shown, that the best perfomance indices are provided by the structure of control system with the PI-regulator of speed and the P-regulator of current which is the result of system adjusting to the original modular optimum offered by Kessler, at the simultaneous consideration of reference input and disturbance.
Keywords: DC electric drive, regulator adjusting.
Объектом исследования в данной работе является двухконтурная система управления электропривода постоянного тока с угловой скоростью Ω в качестве выходной величины, выполненная по структуре подчинённого управления с П (ПИ) регуляторами тока РТ и скорости РС [1].
При исследовании за основу принята математическая модель системы в виде обобщённой структурной схемы [2] с записью переменных (угловой скорости ω, тока якорной цепи i и напряжения на выходе силового преобразователя u) в относительных единицах. За базовые значения приняты: заданное значение угловой скорости Ω0, номинальный ток электродвигателя Iн и противо-ЭДС вращения Eя=Cе∙Ω0 при заданном значении угловой скорости. Структурная схема системы с несколько изменёнными обозначениями параметров приведена на рис. 1.
Неизменяемыми параметрами данной системы являются: электромагнитные постоянные времени силового преобразователя Tg и якорной цепи
электродвигателя Ta, электромеханическая постоянная времени Tm и статизм электропривода в разомкнутой системе ![]() .
.
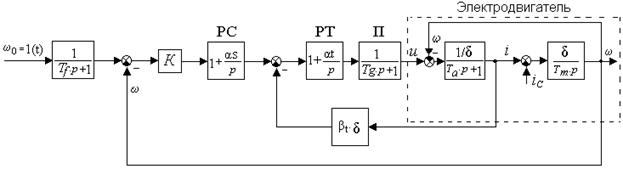
Рис. 1 – Обобщенная структурная схема системы электропривода с подчиненным управлением
Настраиваемые параметры системы: коэффициент усиления контура скорости K, равный произведению коэффициентов усиления датчика скорости, регуляторов скорости РС и тока РТ, силового преобразователя П и электродвигателя по управляющему воздействию; коэффициент усиления контура тока βt, равный произведению коэффициентов усиления датчика тока, регулятора тока РТ, силового преобразователя и якорной цепи электродвигателя; коэффициенты интегральных составляющих регулятора скорости αs и регулятора тока αt.
Внешними воздействиями на систему являются: задающее воздействие ω0=1(t) и возмущающее воздействие, представленное на структурной схеме статической составляющей тока iс. На входе системы для ограничения перерегулирования может использоваться фильтр с постоянной времени Tf.
Содержанием и целью исследования является сравнительный анализ на конкретном примере результатов настройки регуляторов скорости и тока и обоснование выбора варианта, обеспечивающего наилучшие показатели качества переходных процессов в системе.
Метод исследования – визуально ориентированное моделирование в SciLab переходных процессов при пуске электропривода и набросе нагрузки. Моделирование выполнялось с численными значениями неизменяемых параметров, заимствованными из примера настройки [3, С. 134–136] и использованными в [2]: Tg=0.01 c, Ta=0.022 c, Tm=0.062 c, δ=0.16.
В качестве показателей качества приняты численные значения перерегулирования σ, %, времени регулирования τ в секундах и статизм системы S, равный величине относительной ошибки при номинальной нагрузке, для определения которых фиксировались координаты соответствующих точек на графиках зависимости угловой скорости от времени.
Исследовались 3 варианта структур рассматриваемой системы:
- с П-регулятором скорости и ПИ-регулятором тока. К такой структуре приводит настройка системы на стандартный модульный оптимум (СМО) [1];
- с ПИ-регуляторами скорости и тока, которая является результатом настройки на стандартный симметричный оптимум (ССО) [1];
- с ПИ-регулятором скорости и П-регулятором тока (или без регулятора тока – с жёсткой отрицательной обратной связью по току на вход силового преобразователя), которая раньше не ассоциировалась с настройками на модульный и симметричный оптимумы. Для оптимизации её параметров был предложен метод с использованием диаграмм качества [4].
Однако в работе [2] показано, что к данной структуре приводит настройка системы на оригинальный (исходный) модульный оптимум (ОМО), предложенный Кесслером [5]. При этом для учёта влияния на переходные процессы нагрузки на валу электродвигателя в качестве исходной информации использована не передаточная функция системы по задающему воздействию, а выражение в операторной форме для угловой скорости с одновременным учётом как задающего, так и возмущающего воздействий [2].
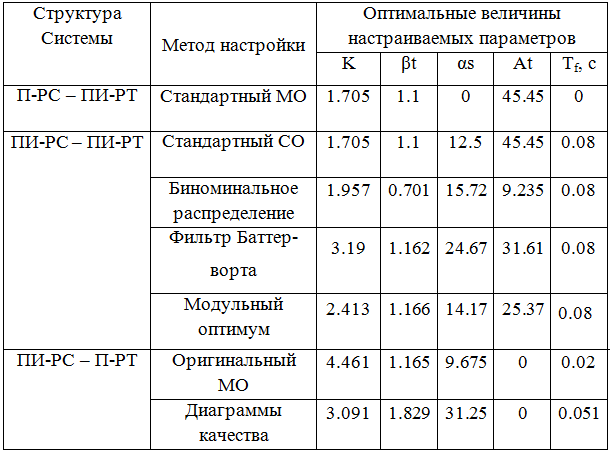
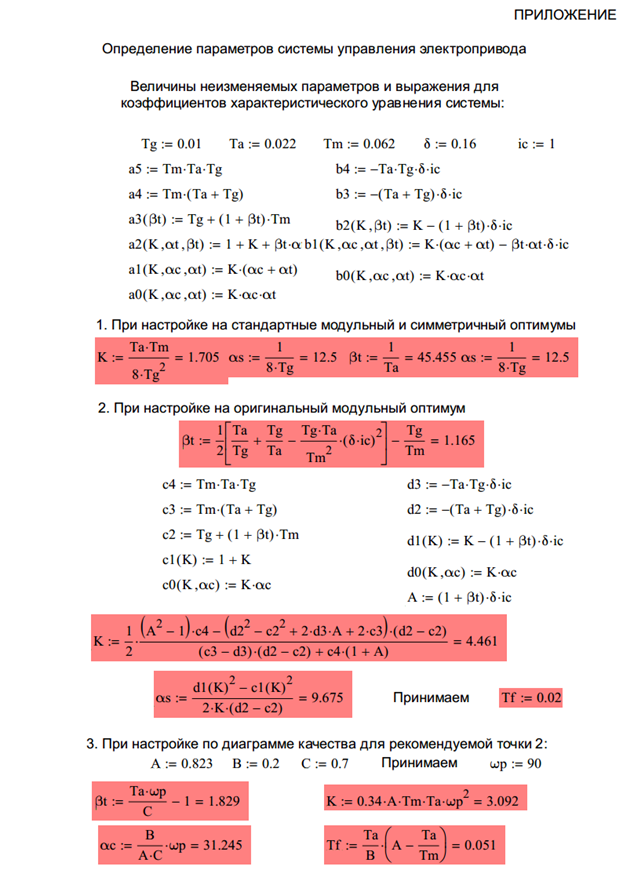
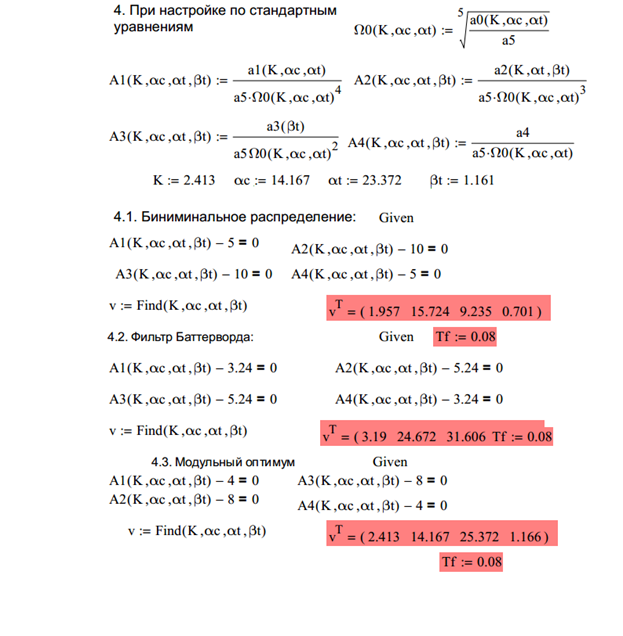
Моделирование рассматриваемой системы выполнено также при величинах настраиваемых параметров, определённых методом стандартных уравнений [3]. Оптимальные величины параметров для различных методов настройки, рассчитанные с использование Mathcad-приложения к статье с привлечением соотношений из работы [2], приведены в таблице 1. Там же указаны принятые численные значения постоянной времени входного фильтра Tf для систем с ПИ-регулятором скорости.
Таблица 1 – Оптимальные величины настраиваемых параметров
Результаты моделирования приведены на рисунках 2 и 3.
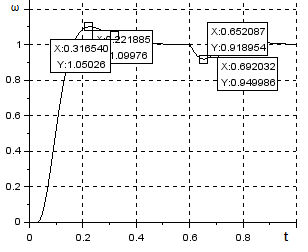
Рис. 2 – График переходного процесса при пуске электропривода и набросе нагрузки с настройкой методом стандартных коэффициентов при биноминальном распределении
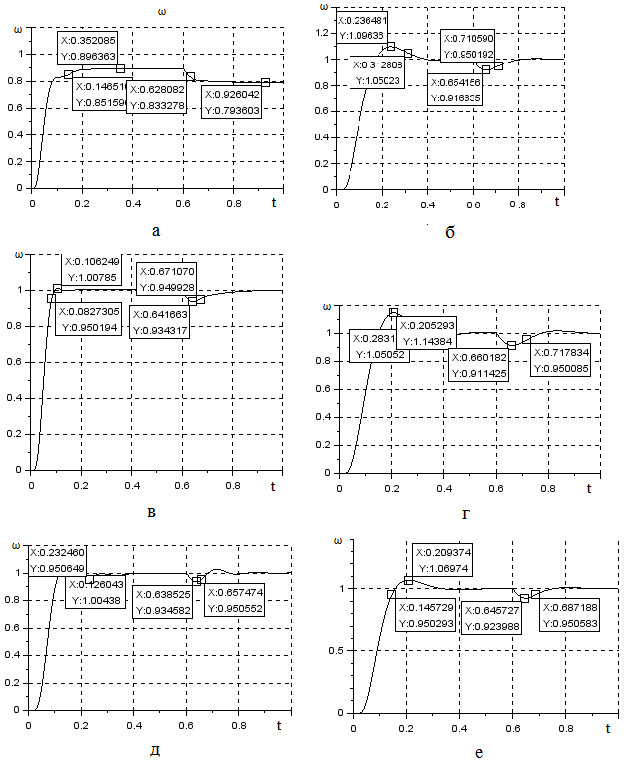
Рис. 3 – Графики переходных процессов при пуске электропривода и набросе нагрузки при настройке: а – на СМО; б – на ССО; в – на ОМО; г – по диаграммам качества; д , е – методом стандартных коэффициентов (фильтр Баттерворта и модульный оптимум)
По оси абсцисс на графиках отложено время t в секундах, по оси ординат – угловая скорость ω в относительных единицах. На графиках нанесены координаты характерных точек для определения показателей качества – времени регулирования τ и перерегулирования σ, численные значения которых сведены в таблицу 2.
Таблица 2 – Численные значения показателей качества для различных методов настройки
| Метод настройки | Показатели качества | |||
| Пуск | Наброс нагрузки | |||
| τ, с | σ, % | τ, с | σ, % | |
| 1. Стандартный МО | 0.147 | 0 | 0.028 | 0 |
| 2. Стандартный СО | 0.313 | 9.636 | 0.054 | 8.34 |
| 3. Оригинальный МО | 0.083 | 0.785 | 0.071 | 6.57 |
| 4. Диаграммы качества | 0.283 | 14.38 | 0.118 | 8.86 |
| 5. Бином. распределение | 0.317 | 9.976 | 0.092 | 8.1 |
| 6. Фильтр Баттерворта | 0.232 | 0.438 | 0.057 | 6.542 |
| 7. Модульный оптимум | 0.146 | 6.974 | 0.087 | 7.601 |
Для удобства сопоставления полученных результатов на рис. 4 приведены относительные значения показателей качества в долях от соответствующих величин для варианта настройки на ОМО.
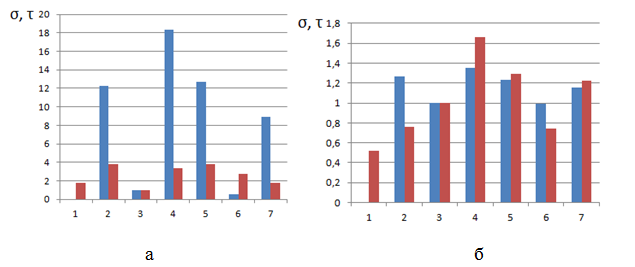
Рис. 4 – Относительные величины времени регулирования ![]() и перерегулирования
и перерегулирования ![]() (а – при пуске, б – при набросе нагрузки)
(а – при пуске, б – при набросе нагрузки)
Номера вариантов, проставленные около оси абсцисс на рисунке 4, соответствуют номерам методов настройки в таблице 2.
Анализ полученных результатов для принятых численных значений неизменяемых параметров электропривода позволяет сделать следующие выводы.
- Наибольшее быстродействие при пуске электропривода обеспечивает настройка на оригинальный модульный оптимум с одновременным учётом задающего и возмущающего воздействий. При других методах настройки время регулирования оказывается в 1.76 – 3.82 раза больше.
- Пуск электропривода при настройке на стандартный модульный оптимум происходит без перерегулирования, однако после затухания переходного процесса имеет место существенное отклонения угловой скорости от заданного значения – статизм превышает 10%, что во многих случаях неприемлемо.
- Пуск при настройке на оригинальный модульный оптимум и при настройке методом стандартных уравнений с коэффициентами фильтра Баттерворта также происходит практически без перерегулирования (σ < 1%). Однако быстродействие в последнем случае примерно в 2.9 раза ниже.
- При настройке системы со структурой ПИ-РС – П-РТ с использованием диаграмм качества время регулирования в 3.41 раза превышает аналогичный показатель для настройки на оригинальный модульный оптимум, а перерегулирование σ > 14%, что существенно превышает рекомендуемые значения.
- При набросе нагрузки переходной процесс заканчивается за минимальное время и без перерегулирования при настройке системы на стандартный модульный оптимум, но, как уже было отмечено выше, система с П-регулятором скорости и ПИ-регулятором тока с принятыми величинами неизменяемых параметров имеет низкую точность регулирования в статике. Сравнимые показатели по быстродействию при отработке наброса нагрузки имеют системы с настройкой на стандартный симметричный оптимум, оригинальный модульный оптимум и методом стандартных уравнений с коэффициентами фильтра Баттерворта; для остальных методов настройки быстродействие несколько ниже.
- Минимальное перерегулирование при набросе нагрузки имеют системы, настроенные на оригинальный модульный оптимум и методом стандартных уравнений с коэффициентами фильтра Баттерворта.
- Изложенное выше позволяет в первую очередь рекомендовать к применению систему управления со структурой ПИ-РС – П-РТ с настройкой на оригинальный модульный оптимум с одновременным учётом задающего и возмущающего воздействий.
Список литературы / References
- Шрейнер Р.Т. Системы подчинённого управления электроприводов. Ч. 1. Электроприводы постоянного тока с подчинённым регулированием координат: Учеб. пособие для вузов /Р.Т. Шрейнер. –Екатеринбург: Изд-во Урал. гос. проф.-пед. ун-та. 1977. – 279 с.
- Сташинов Ю.П. К вопросу о настройке системы управления электропривода постоянного тока на модульный оптимум. Ч. 1 // Электротехника. № 1. 2016. – С. 2–7.
- Терехов В.М. Системы управления электроприводов: Учебник для студ. высш. учеб. заведений / В.М. Терехов, О.И. Осипов; Под ред. В.М. Терехова. –М.: Издательский центр «Академия». 2005. – 304 с.
- Комплектные системы управления электроприводами тяжёлых металлорежущих станков / Н.В. Донской, А.А. Кириллов, Я.М. Купчан и др.; Под ред. А. Д. Поздеева. –М.: Энергия. 1980. – 288 с.
- Шёнфельд Р., Хабигер Э. Автоматизированные электроприводы: Пер. с нем / Р. Шёнфельд, Э. Хабигер; Под ред. Ю.А. Борцова. –Л.: Энергоатомиздат. Ленингр. отд-ние. 1985. – 464 с.
Список литературы на английском языке/ References in English
- Shrejner R.T. Sistemy podchinjonnogo upravlenija jelektroprivodov. Chast' 1. Jelektroprivody postojannogo toka s podchinjonnym regulirovaniem koordinat: Ucheb. posobie dlja vuzov [Systems of the subordinated control of electric drives. Part 1. DC electric drives with the subordinated regulation of coordinates: Manual for higher education institutions] / R.T. Shrejner. –Ekaterinburg: Izd-vo Ural. gos. prof.-ped. un-ta. 1977. – 279 p. [in Russian]
- Stashinov Ju.P. K voprosu o nastrojke sistemy upravlenija jelektroprivoda postojannogo toka na modul'nyj optimum. Ch. 1 [On the issue of control system adjustment of a direct current drive on the modulus optimum. Part 1] / Yu.P. Stashinov. // Jelektrotehnika. № 1. 2016. –P. 2–7. [in Russian]
- Terehov V.M. Sistemy upravlenija jelektroprivodov: Uchebnik dlja stud. Vyssh. Ucheb. Zavedenij [Control systems of electric drives: The textbook for students of higher education institutions/ V.M. Terehov, O.I. Osipov; edited by V.M. Terehov. M.: Izdatel'skij centr «Akademija». 2005. –304 p. [in Russian]
- Komplektnye sistemy upravlenija jelektroprivodami tjazhjolyh metallorezhushhih stankov [Complete control systems of electric drives of heavy metal-cutting machines] / N. V. Donskoy, A. A. Kirillov, Ya. M. Kupchan and others; edited by A. D. Pozdeev. – M.: Jenergija. 1980. – 288 p.
- Shjonfel'd R., Habiger Je. Avtomatizirovannye jelektroprivody: Per. s nem. [The automated electric drives: Transl. from German] / edited by Yu.A. Borczov. – L.: Jenergoatomizdat. Leningr. otd-nie. 1985. – 464 p.