МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ КАЧЕНИЯ ИЗМЕРИТЕЛЬНОГО КОЛЕСА СИСТЕМЫ «ПЯТОЕ КОЛЕСО»

Брюхов А.П.1, Козырин Н.С.2
1,2Магистрант, Пермский национальный исследовательский политехнический университет
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ КАЧЕНИЯ ИЗМЕРИТЕЛЬНОГО КОЛЕСА СИСТЕМЫ «ПЯТОЕ КОЛЕСО»
Аннотация
В работе проведены основные элементы расчетов необходимые при разработке системы измерения фактической прямолинейной скорости движения автомобиля типа «Пятое колесо». Описана математическая модель качения измерительного колеса без проскальзывания по опорной поверхности в двух режимах движения (ускоренном и замедленном). Определена величина вертикальных перемещений измерительного колеса при клевке и приседании кузова автомобиля относительно опорной поверхности. Определен ход перемещения системы подрессоривания измерительного колеса.
Ключевые слова: измерение скорости, исследование тормозной эффективности, мобильная лаборатория, система типа «Пятое колесо», теория качения деформируемого колеса, качение измерительного колеса без проскальзывания, величина крена кузова автомобиля.
Bryukhov A.P.1, Kozyrin N.S.2
1,2Undergraduate student, Perm National Research Polytechnic University
MATHEMATICAL DESCRIPTION OF ROLLING OF MEASURING WHEEL SYSTEM “FIFTH WHEEL”
Abstract
The work provides the main calculation elements required for the development of a system for the measurement of the actual straight-line speed of the automobile “Fifth wheel.” It describes the mathematical model of the measuring wheel rolling without slipping on the supporting surface in two modes of movement (acceleration and deceleration). The magnitude of the vertical displacement of a measuring wheel at graze burst and bottoming of the car body in relation to the bearing surface is determined. The course of movement of the system cushioning the measuring wheel is also determined.
Keywords: speed measurement, research braking effectiveness, mobility laboratories, the system of the "Fifth Wheel", theory of deformable rolling wheels, rolling measuring wheel without slipping, the value of the car body roll.
Оборудование для измерения фактической скорости движения автомобиля необходимо при проведении всевозможных испытаний и исследований автомобиля, таких как испытания на управляемость и устойчивость, исследование эффективности тормозной системы автомобиля, определение тягово-скоростных и других эксплуатационных характеристик автомобиля, а так же проверка соответствия требований безопасности техническому состоянию.
Система типа «Пятое колесо» зарекомендовало себя наиболее практичной и надежной для испытания при прямолинейном нереверсивном движении по ровным опорным поверхностям с твердым покрытием. Системы является одной из элементов мобильной лаборатории для исследований эффективности торможения автомобиля. Существуют и другие системы измерения скорости движения, но наиболее простой с технологической и конструктивной точки зрения является именно эта система.
Также существует возможность применения для измерения параметров движения автомобиля с помощью измерительных систем с оптическими датчиками скорости или с GPS – приемником, но в первом случае велика вероятность сбоев при работе на некоторых видах покрытия, во втором случае не обеспечивается необходимая точность измерений [1, С.3].
С целью минимизации возникающих погрешностей при проскальзывании измерительного колеса необходимо составить модель его качения при ускоренном и замедленном движении испытуемого автомобиля. Науке известно множество теорий качений колеса. Потребность в теориях качения колеса с эластичной шиной обуславливается разнообразием инженерных задач о колебаниях и курсовой устойчивости автомобиля, и сложность процессов протекающих в пятне контакта шины с опорной поверхностью и в самой шине.
Задачи решающие курсовую устойчивость основаны на гипотезе, что при наличии, действующей на колесо поперечной горизонтальной реакции возникает боковой увод шины. Данная теория не применима при описании качения измерительного колеса, так как в общем случае на колесо не действует поперечных реакций, а изменение курса движения происходит лишь при маневрировании на полигоне, испытания по исследованию тормозных свойств, происходят при прямолинейном движении.
Более полная модель качения колеса рассмотрена М. В. Келдышем. В теории М. В. Келдыша рассмотрена сложная деформация шины, при качении без проскальзывания по плоской опорной поверхности при наличии постоянной нагрузки. Так же рассматриваются обобщения и уточнения для построения модели качения колеса с эластичной шиной по неровной поверхности при быстро меняющихся нагрузках. Данная теория весьма сложна и не подходит в полной мере для применения в описании качения измерительного колеса, более подробное ознакомление с данной теорией вынесено на рассмотрение в магистерской диссертации [2, С.6].
Так же имеет место быть упругим моделям качения шин, позволяющие оценить характер и закономерность деформации шины, установить зависимость между реакцией со стороны опорной поверхности и деформациями шины. Поскольку в качестве измерительного колеса применяется велосипедное колесо и шоссейная шина, обладающая минимальной деформацией для минимизации сопротивления качению, данная теория не применима в полной мере в силу малых деформаций шины [3, С.120].
В модели качения измерительного колеса рассмотрено качение измерительного колеса по плоской поверхности при постоянной вертикальной нагрузке при двух режимах качения колеса, ускоренном и замедленном движении автомобиля. Перед моделью стоит задача в определении необходимой прижимной силы для движения измерительного колеса без проскальзывания [4, С.30].
На измерительное колесо действует прижимная сила Pz в вертикальном направлении перпендикулярно опорной поверхности, нормальная нагрузки колеса. В продольном направлении действует тяговая сила Px. Нормальная реакции опорной поверхности Rz направлена вверх перпендикулярно плоскости дороги, точка приложения смещена на величину aш относительно центра в основании колеса. Продольная реакция Rx расположена в плоскости дороги и направлена ускорению движения. Так же ускоренное или замедленное вращения колеса сопровождается моментом инерции Jк. Качение колеса вызывает силу сопротивлению качению Pf и момент сопротивлению качения Mf направленный против движения. Исходные данные для расчета представлены в Таблице 1.
Таблица 1 – Исходные данные для расчета
| Параметр | Буквенное обозначение | Значение |
| Коэффициент сцепления для асфальтобетонного покрытия | |
0,8 |
| Коэффициент сопротивления качению для асфальтобетонного покрытия | f | 0,014 |
| Продольное ускорение автомобиля при торможении, м/с2 | jт | 7 |
| Продольное ускорение автомобиля при разгоне, м/с2 | jу | 5 |
| Момент инерции измерительного колеса, кгм2 | Jк | 0,17 |
| Динамический радиус измерительного колеса, мм | rд | 0,33 |
Составляется схема сил действующих на измерительное колесо при замедленном и ускоренном движении автомобиля (рис. 1 и рис. 2 соответственно).
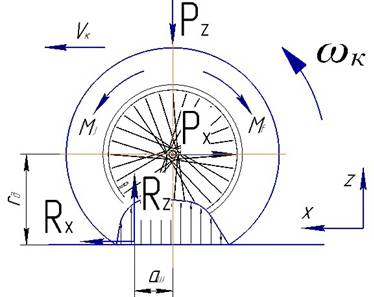
Рис. 1 – Расчетная схема при замедленном движении
Система уравнений для замедленного движения автомобиля имеет вид:
| |
(1) |
| |
(2) |
 |
(3) |
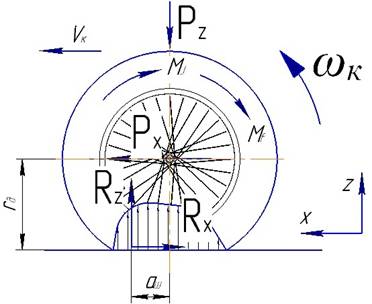
Рис. 2 – Расчетная схема при ускоренном движении колеса
Система уравнений для данной расчетной схемы имеет вид, при отсутствии вертикальных ускорений:
| |
(4) |
| |
(5) |
 |
(6) |
При движении колеса возникают потери энергии на трение шины и опорной поверхности, а так же деформацию шины. В результате этих потерь возникает сила сопротивления качению Pf. Условная количественная характеристика определяет отношение силы сопротивления качения Pf к нормальной реакции Rz опорной поверхности, называется коэффициентом сопротивлению качения, значение которого является табличным в зависимости от типа покрытия. Сила сопротивления качения образует момент сопротивлению качения Mf на плече rд.
 |
(7) |
| |
(8) |
Сила сцепления представляет собой максимальное значение горизонтальной реакции и пропорциональна вертикальной нагрузке на колесо и зависит от коэффициента сцепления. Коэффициент сцепления, существует продольный и поперечный, в данном случае рассматривается продольный, зависит в свою очередь от конструктивных параметров шины и типа дорожного покрытия.
| |
(9) |
| |
(10) |
Для первого случая (замедление) уравнение моментов имеет вид:
 |
(11) |
Для второго случая (ускорение) уравнение моментов имеет вид:
 |
(12) |
В случае качения замедления проскальзывание колес возникает при таком моменте сопротивления качению, который больше суммы момента сцепления и момента инерции
Как видно из уравнения (12) проскальзывание колеса при его ускоренном качении, возникает, когда момент инерции и момент сопротивлению качению превышает момент создаваемый силой сцепления шины с дорогой.
В качестве измерительного колеса выступает колесо шоссейного велосипеда, которое обладает малым моментом инерции, а покрышка обладает достаточной жесткостью, при которой момент сопротивления качению не велик. Из чего можно сделать вывод, что при наличии достаточной вертикальной нагрузки, проскальзывания измерительного колеса возникать не будут.
Нормальная реакция опорной поверхности численно равна вертикальной нагрузке на измерительное колесо. Минимальная необходимая величина прижимного усилия составляет 12 Ньютонов (в режиме замедленного движения). Определив необходимую прижимную силу дальнейшим этапом работы, является исследование влияния продольного крена кузова при движении автомобиля на работу измерительного колеса.
Приведенные расчеты представляют собой предпосылку для дальнейшего расчета системы подрессоривания и разработки элементов конструкции измерительной системы типа «Пятое колесо», применяемого для проведения испытаний автомобильного транспорта.
Список литературы / References
- Кристальный С. Р. Принцип создания шинного тестера на базе серийного легкового автомобиля / С. Р. Кристальный, В. Н. Задворнов, Н. В. Попов, В. А. Фомичев. // Журнал автомобильных инженеров. – 2013. – № 5 (82). – С.38-45.
- Келдыш М. В. Шимми переднего колеса трехколесного шасси / М. В. Келдыш. –М., Бюро новой техники НКАП, 1945, 34 с.
- Хачатуров А. А. Динамика системы дорога – шина – водитель / А. А. Хачатуров. – М.: Машиностроение, 1976. – 535 с.
- Литвинов А. С., Автомобиль. Теория эксплуатационных свойств / А. С. Литвинов, Я. Е. Фаробин. – М.: Машиностроение, 1989. - 243 с.;
Список литературы на английском языке / References in English
- Crystal S. R., Princip sozdanija shinnogo testera na baze serijnogo legkovogo avtomobilja [Principle of establishing a bus tester on the basis of serial car] / S. R. Crystal, V. N. Zadvornov, N. V. Popov, V. A. Fomichev // Zhurnal avtomobil'nyh inzhenerov [Journal of automotive engineers]. - 2013. - № 5 (82). - P.38-45. [in Russian]
- Keldysh M. V. Shimmi perednego kolesa trehkolesnogo shassi [Shimmy front wheel tricycle undercarriage]/ M. V. Keldysh. -M., Bjuro novoj tehniki NKAP, 1945, 34 P. [in Russian]
- Khachaturov A. A. Dinamika sistemy doroga – shina – voditel' [Dynamics of system road - tyre - car – driver]/ A. A. Khachaturov. - M .: Mashinostroenie , 1976. - 535 P. [in Russian]
- Litvinov A. S., Avtomobil'. Teorija jekspluatacionnyh svojstv [Car. Theory of operating properties]/ A. S. Litvinov, J. E. Farobin. - M.: Mashinostroenie , 1989. - 243 P. [in Russian]