ИССЛЕДОВАНИЕ УСЛОВИЙ ИСПОЛЬЗОВАНИЯ ДОПОЛНИТЕЛЬНЫХ СПУТНИКОВЫХ ИЗМЕРЕНИЙ ПРИ СЪЕМКЕ ЛИНЕЙНЫХ СООРУЖЕНИЙ В ИСХОДНОЙ СИСТЕМЕ КООРДИНАТ ПРОЕКТА
ИССЛЕДОВАНИЕ УСЛОВИЙ ИСПОЛЬЗОВАНИЯ ДОПОЛНИТЕЛЬНЫХ СПУТНИКОВЫХ ИЗМЕРЕНИЙ ПРИ СЪЕМКЕ ЛИНЕЙНЫХ СООРУЖЕНИЙ В ИСХОДНОЙ СИСТЕМЕ КООРДИНАТ ПРОЕКТА
Научная статья
Федоров С.А.1, *, Хромченко А.В.2
1 ORCID 0000-0002-5410-3916;
1, 2 Тихоокеанский государственный университет, Хабаровск, Россия
* Корреспондирующий автор (fedoroff27[at]mail.ru)
АннотацияПри практических работах с применением геодезического спутникового оборудования на объектах линейного типа могут быть ситуации, когда по каким-либо причинам не удаётся выполнить измерения с соблюдением единой технологии производства работ или когда дополнительные определения были выполнены после проведения основных измерений.
В статье сделан анализ качества измерений, получаемых с помощью геодезических спутниковых приёмников при автономных и относительных определениях для характеристики протяжённости трассы сооружений линейного типа.
Авторами предложена методика вставки дополнительных спутниковых определений в исходную систему координат проекта с целью объединения результатов измерений для повышения их точности.
Ключевые слова: геодезическое спутниковое оборудование; система координат проекта; государственная геодезическая сеть; базовая линия; режим «Stop-and-Go»; аффинное преобразование.
A STUDY OF THE CONDITIONS FOR THE USE OF ADDITIONAL SATELLITE MEASUREMENTS WHEN CAPTURING FOOTAGE OF OUTSIDE PLANT IN THE ORIGINAL COORDINATE SYSTEM OF A PROJECT
Research article
Fedorov S.A.1, *, Khromchenko A.V.2
1 ORCID 0000-0002-5410-3916;
1, 2 Pacific National University, Khabarovsk, Russia
* Corresponding author (fedoroff27[at]mail.ru)
AbstractWhen using geodetic satellite equipment on outside plant properties, there may be situations when it is not possible to perform measurements in compliance with the common approaches, or when additional definitions were made after the main measurements.
This article analyzes the quality of measurements obtained using geodetic satellite receivers with autonomous and relative definitions to characterize the length of the route of the outside plant.
The authors propose a method for including additional satellite definitions into the original coordinate system of the project in order to combine the measurement results with the aim of improving their accuracy.
Keywords: geodetic satellite equipment; project coordinate system; state geodetic network; baseline; Stop-and-Go method; affine transformation.
ВведениеПри съёмке автомобильной дороги или автозимника основные измерения проводят по методике относительных спутниковых определений от базовой станции (базы), привязанной к пунктам государственной геодезической сети (ГГС), а дополнительные – без привязки базы к исходным пунктам из-за их недоступности. В другом случае первая часть кинематических определений могла быть выполнена с использованием базового приёмника, связанного с ГГС, тогда как последующие измерения проводились одним приёмником по методике автономных спутниковых определений.
Все названные выше комбинации видов спутниковых определений требуют объединения (увязки) разнородных по качеству измерений для их последующей обработки в единой системе координат, принятой для данного объекта. Эту задачу можно решать методом вставки одной координатной системы, где были сделаны дополнительные измерения, в другую исходную (основную) систему координат проекта (СКп) [1], [2].
Для практических целей также представляют интерес исследования по оценке точности определения отдельных расстояний или протяжённости трассы автозимника, автомобильной дороги и других линейных сооружений по значениям плоских прямоугольных координат, измеренным геодезическими спутниковыми приёмниками в автономном режиме или относительным методом с образованием базовых линий без трансформирования координат в государственную (СК-42, СК-95) или в местную системы координат [3]. Возможность использования автономных определений и результатов обработки базовых линий без перехода к СК-42 упрощает технологию получения необходимых геодезических данных для линейных сооружений большой протяжённости при отсутствии, недоступности или значительной удалённости исходных геодезических пунктов от района работ [2], [4], [5].
Основные результатыПост-обработку спутниковых измерений, выполненных с помощью геодезических приёмников, осуществляют в определённой последовательности (см. рисунок 1). В качестве СКп наиболее часто используется зональная система плоских прямоугольных координат СК-42, параметры перехода к которой от WGS-84 заключены в настройках программы, предназначенной для обработки спутниковых измерений. В дальнейшем окончательные результаты обработки измерений могут быть трансформированы в любую другую локальную систему координат по значениям совместных параметров связи систем.
При импорте «сырых» данных из приёмников осуществляется объединение разрозненных автономных спутниковых измерений в единый массив и устанавливаются направления условных базовых линий DA между точками статических и кинематических определений (см. рисунок 2.а), если использовался метод относительных спутниковых измерений с образованием базовой станции. В итоге формируется списки точек Aj и плоских прямоугольных координат, значения которых смещены на 3-7 м по отношению к их истинным координатам в СК-42.
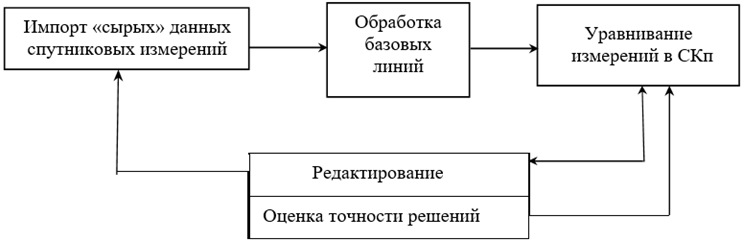
Рис. 1 – Схема обработки геодезических спутниковых измерений
На втором этапе обработки базовых линий производятся вычисления проложений (базовых линий) для расстояний DB, измеренных от базовой станции до подвижного приёмника (см. рисунок 2.а), и осуществляется уточнение на ± 1-4 м прямоугольных координат определяемых точек Bj относительно их «сырых» значений. Базовая станция и съёмочные точки по-прежнему смещены относительно своего истинного положения в СКп.
При уравнивании измерений на третьем этапе процесса обработки данных, присваивают базовой станции её истинные значения координат, известные, например, в СК-42, и вычисляют окончательные плоские прямоугольные координаты определяемых точек Cj в системе координат проекта (см. рисунок 2.б). Вычисление отметок для съёмочных точек выполняют в системе высот проекта (СВп), для чего опорным точкам задают исходные отметки в СВп, затем подгружают геоидальные поправки и повторяют процесс уравнивания измерений.
В таблице 1 приведены результаты съёмки оси автомобильной дороги в отдельных точках, полученные методом висячих кинематических определений в режиме «Stop-and-Go». Съёмка велась подвижным приёмником Trimble-4600LS, установленном на автомобиле. Обработка измерений произведена в Trimble Geomatik Office. Съёмка выполнена на объекте, расположенном в 100 км к югу от г. Якутска [6].
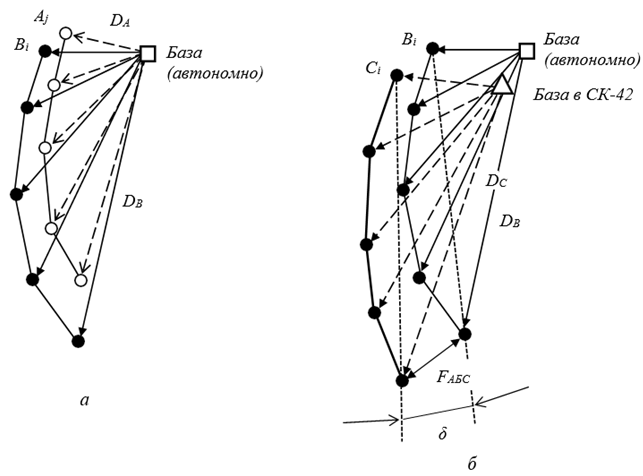
Рис. 2 – Схемы взаимного расположения точек трассы при автономных определениях и обработанных базовых линиях (а) и при обработанных базовых линиях и в СК-42 (б)
Анализ значений приращений координат в таблице 1 свидетельствует о наличии закономерностей в характере изменения местоположения определяемых точек после перехода от координат обработанных базовых линий к координатам в СК-42. Действительно, в результате уравнивания базовых линий в СКп происходит не только параллельный сдвиг точек на величину поправок ΔХИ и ΔYИ, присваиваемых координатам базовой станции при их трансформировании в СК-42, но и разворот трассы относительно базы на величину угла δ ≈ +4,0ʺ. Это приводит к увеличению размеров вектора FАБС поправок в координаты определяемых точек на величину порядка 1,5 см/км.
Таблица 1 – Динамика изменения приращений координат при обработке спутниковых измерений
| № точки | Длина базовой линии D, м | Приращения координат определяемых точек | ||||
| на стадии обработки базовых линий | на стадии уравнивания в СК-42 | |||||
| (ХВ – ХА), м | (YВ –YА), м | (ХС – ХВ), м | (YС – YВ), м | FАБС, м | ||
| База | 0 | 0 | 0 | ΔХИ =-2,121 | ΔУИ =-3,462 | 4,060 |
| 781 | 116,579 | 0,488 | -2,868 | -2,120 | -3,460 | 4,058 |
| 770 | 2975,698 | 2,941 | -3,578 | -2,076 | -3,498 | 4,068 |
| 745 | 6136,498 | 1,179 | -2,569 | -2,084 | -3,576 | 4,139 |
| 737 | 8931,342 | 1,666 | -2,501 | -2,074 | -3,629 | 4,180 |
| 717 | 11936,190 | 0,570 | -1,444 | -2,105 | -3,698 | 4,255 |
| 697 | 15028,888 | 0,828 | -0,812 | -2,114 | -3,754 | 4,308 |
| 681 | 17576,580 | 1,657 | -0,341 | -2,104 | -3,803 | 4,346 |
В таблице 2 представлены результаты наших экспериментов, характеризующие динамику изменения расстояний DA, DB и DС от базовой станции до подвижного приёмника (см. рисунок 2), вычисленных на плоскости при обработке спутниковых определений по схеме «автономные измерения – базовые линии – уравнивание в СК-42». Спутниковые определения координат подвижного приёмника выполнены методом кинематики в режиме «Stop-and-Go». Подвижный приёмник по-прежнему устанавливался на автомобиле.
Анализ данных таблицы 2 показывает, что при переходе от автономных измерений к обработанным базовым линиям и к линиям в СК-42, расстояния между базой и подвижным приёмником изменяются существенно в особенности на коротких базовых линиях. В свою очередь, обработанные и уравненные в СК-42 базовые линии в пределах одной станции различаются между собой незначительно и хорошо коррелируют с расстояниями до подвижного приёмника. Для метода кинематики погрешности измерения линий с точностью порядка 1/100000-1/200000 могут квалифицироваться как безошибочные.
Таблица 2 – Динамика изменения проложений базовых линий
| № объекта (базы) | Направление трассы | Автономные измерения, DA, м | Разности длин базовых линий | (DC – DB) D | ||
| (DB – DA), м | (DC – DA), м | (DC – DB), м | ||||
| 1 | юго-запад 20о от базовой станции | 116,579 2975,698 6136,498 8931,342 11936,190 15028,888 17576,580 | 1,942 0,730 -0,491 -1,094 -0,596 -0,854 -1,660 | 1,941 0,728 -0,498 -1,104 -0,610 -0,871 -1,681 | 0,000 -0,003 -0,007 -0,010 -0,013 -0,017 -0,020 | 0 1/992000 1/876600 1/893000 1/918170 1/884000 1/878800 |
| 2 | северо-восток 30о от базовой станции | 14365,494 9061,708 6933,383 3867,110 1586,806 109,485 | -0,919 0,882 0,261 -0,344 -0,485 -1,385 | -0,860 0,919 0,290 -0,328 -0,479 -1,385 | 0,059 0,037 0,029 0,016 0,007 0,001 | 1/243470 1/244900 1/239070 1/241690 1/226570 1/109460 |
| юго-запад 15о от базовой станции | 1514,688 3457,192 5463,624 7454,299 | -0,792 -0,594 -1,120 -0,370 | -0,786 -0,579 -1,096 -0,288 | 0,006 0,014 0,023 0,032 | 1/252330 1/246930 1/237520 1/232940 | |
Таким образом, следует вывод, что для измерения длины трассы методом кинематики в режиме «Stop-and-Go» с продолжительностью сеансов измерений на точках равной 30 с, можно не производить трансформирование базовых линий в СК-42, так как точные значения протяжённости трассы могут быть вычислены по обработанным базовым линиям. Более того, статистические данные о расстояниях между смежными точками на трассе, полученные нами для названных выше двух объектов, свидетельствуют о равноточности вычисления проложений между смежными точками кинематики как по координатам своих обработанных базовых линий, так и по координатам уравненных базовых линий в СК-42. Также установлено, что расстояния между смежными точками трассы на плоскости могут быть рассчитаны со средней квадратической погрешностью порядка ± 0,3-0,4 м по измеренным «сырым» координатам автономных спутниковых определений, полученных с применением одного спутникового приёмника. Эти значения характеризуют точность взаимного положения точек, определяемых при автономных измерениях.
При проведении паспортизации или диагностики автомобильных дорог определяют геометрические характеристики плана трассы автодороги и производят съёмку сооружений и обустройств в системе пикетажа дороги. Для получения геодезических данных о местоположении объектов съёмки и протяжённости автодорог целесообразно использовать методы спутниковых определений координат подвижного приёмника, установленного на автотранспортном средстве. В данных условиях наибольшую эффективность проведения съёмочных работ могут обеспечить кинематические спутниковые определения, выполненные в режиме «Stop-and-Go». При этом особую значимость приобретает анализ условий использования автономных определений, выполненных одним подвижным приёмником.
В таблице 3 представлены результаты эксперимента по оценке точности определения протяжённости трассы, рассчитанной по координатам кинематических измерений. Результаты оценки получены путём сопоставления по участкам величин протяжённости трассы, вычисленных по координатам автономных измерений и по данным обработанных базовых линий относительно их соответствующих значений в СК-42.
Для повышения точности автономных определений следует увеличивать продолжительность сеанса спутниковых измерений и максимально исключать колебания (вибрацию) подвижного приёмника при его установке на автомобиле [7]. На коротких участках необходимо уменьшать интервал между определяемыми точками на трассе.
Таблица 3 – Оценка точности определения протяжённости трассы
| № участка | Количество точек кинематики при съёмке трассы, шт. | Среднее расстояние между точками кинематики, м | Протяжённость трассы в СК-42, м | Погрешность длины трассы по данным автономных измерений | Погрешность длины трассы по данным обработки базовых линий |
| 1 | 13 | 248 | 3732, 676 | 1/2860 | 1/1244200 |
| 2 | 38 | 165 | 8668,068 | 1/37200 | 1/866800 |
| 3 | 46 | 198 | 11403,851 | 1/24850 | 1/877200 |
| 4 | 63 | 192 | 16098,962 | 1/13240 | 1/847250 |
| 5 | 86 | 234 | 19954,446 | 1/20829 | 1/1108600 |
| 6 | 101 | 225 | 22589,955 | 1/15644 | 1/1254900 |
Предложенная нами технология объединения в СКп дополнительных и основных спутниковых определений основана на использовании параметров для перехода от одной координатной системы к другой, вычисленных по координатам совмещённых точек. То есть, параметры трансформирования координат из системы в систему рассчитываются по одноимённым точкам, чьи координаты известны в двух системах. Для расчёта параметров по трём и более совмещённым точкам на плоскости применяют метод Хельмерта или аффинное преобразование.
На рисунке 3 показаны наиболее типичные схемы вставки автономных спутниковых измерений, выполненных методом кинематики, в систему координат ранее созданных проектов. В качестве основной (исходной) системы рассматривается система координат СК-42. Для вычисления параметров трансформирования на весь район производства работ или на территорию за его пределами используют координаты автономных определений и уравненные прямоугольные координаты одноимённых точек Сi, полученные при первоначальном формировании основного проекта (см. рисунок 3).
Целью вставки в СКп точек Аi по известным из автономных определений координатам является вычисление для них новых значений прямоугольных координат, которые станут определять положение точек Ni в исходной СК-42, принятой для основного проекта.
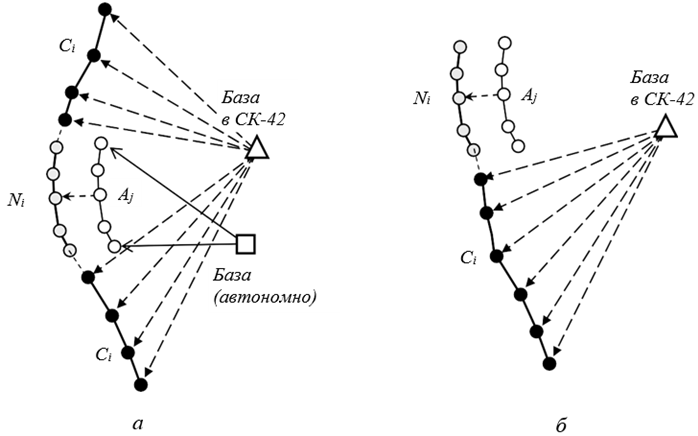
Рис. 3 – Схемы вставки автономных измерений в систему координат проекта в пределах района ранее выполненных спутниковых определений (а) и за пределами района предыдущих спутниковых определений (б)
При трансформировании координат в другую систему по известным параметрам, вычисленным по Хельмерту, используются следующие известные зависимости [8], [9]:
| X = X 2 + M × dX × cosα - M × dY × sinα , | (1) |
| Y = Y2 + M × dX × sinα - M × dY × cosα , | (2) |
В выражениях (1) и (2) параметры M и α характеризуют соответственно масштаб преобразований для расстояний и угол взаимного разворота осей координатных систем. При таком преобразовании расстояния изменяются по всем направлениям в соответствии с масштабом M, тогда как углы между направлениями остаются постоянными.
Аффинное преобразование из одной прямоугольной системы в другую производится по следующим известным общим формулам [10]:
X ‘ = X 2 + a1 * dX + b1 * dY , Y ‘ = Y2 + a2 * dX + b2 * dY .При аффинном преобразовании в зависимости от положения исходного пункта меняются расстояния и углы между направлениями.
В таблице 4 приведены результаты вставки автономных спутниковых определений, выполненных одним приёмником, в исходную систему СК-42. Измерения соответствуют схеме, показанной на рисунке 3.а, согласно которой автономные определения могли быть выполнены в одном случае без установки базовой станции, а во втором случае – от новой базы, но без последующей обработки базовых линий.
Таблица 4 – Погрешности вставки автономных определений в СК-42
| Количество совмещённых точек для определения параметров | Средняя квадратическая погрешность согласованности координат совмещённых точек при вычислении параметров преобразования, mК, м | Количество дополнительных точек для вставки в СКп | Средние квадратические погрешности определения координат при вставке точек в СК42 | ||||
| по Хельмерту | аффинное преобразование | ||||||
| по Хельмерту | аффинное преобразование | mX, м | mY, м | mX, м | mY, м | ||
| 51 | ±0,672 | ±0,563 | 50 | ±0,750 | ±0,332 | ±1,201 | ±0,352 |
| 40 | ±0,587 | ±0,447 | 50 | ±0,862 | ±0,376 | ±1,070 | ±0,379 |
| 30 | ±0,299 | ±0,236 | 50 | ±1,029 | ±0,375 | ±1,023 | ±0,404 |
| 20 | ±0,169 | ±0,153 | 50 | ±1,016 | ±0,351 | ±1,017 | ±0,481 |
| 10 | ±0,109 | ±0,111 | 50 | ±0,885 | ±0,371 | ±0,911 | ±0,455 |
| 6 | ±0,060 | ±0,052 | 50 | ±0,816 | ±0,372 | ±0,828 | ±0.620 |
| 4 | ±0,035 | ±0,044 | 50 | ±0,789 | ±0,379 | ±0,744 | ±0,799 |
| 2 | ±0,000 | - | 50 | ±0,789 | ±0,369 | - | - |
Заключение
Процесс объединения дополнительных автономных определений с измерениями в СКп выполнялся в два этапа. Первоначально по одноимённым
точкам кинематических определений, выполненных автономно и затем уравненных в СКп, были вычислены параметры преобразований из системы координат автономных определений в систему СК-42. Количество совмещённых точек изменялось симметрично относительно области вставки, причём использовались ближайшие к объекту точки. Далее, по параметрам преобразования из системы автономных измерений в основную СКп рассчитывались координаты 50 новых точек, измеренных автономно без базовой станции. Полученные координаты «подгружаемых» в СКп точек Nj сравнивались с координатами этих точек, известными в СК-42.
В случае вставки дополнительных точек, координаты которых уточнены в процессе обработки базовых линий от новой базовой станции (см. рисунок 3.а), преобразования в систему СК-42 выполняются с погрешностями mX = mY = 0 при масштабе m = 0,99999886 и угле α = 4,0ʺ.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Генике А. А. Глобальная спутниковая система определения местоположения GPS и ее применение в геодезии / А. А. Генике, Г. Г. Побединский. – М.: Картгеоцентр. – Геодезиздат, 1999. – 271 с.
- ГОСТ Р 51794-2008. Глобальные навигационные спутниковые системы. Системы координат. Методы преобразований координат определяемых точек. – Введ. 18 декабря 2008. – М.: Стандартинформ, 2009. – 62 с.
- Кафтан В. И. Определение смещений и деформаций по данным спутниковых геодезических измерений / В. И. Кафтан, П. А. Докукин // Геодезия и картография. – 2007. – № 9. – С. 18-21.
- Об утверждении Порядка установления местных систем координат. Приказ Министерства экономического развития РФ № 383 от 28 июля 2017 года [Электронный ресурс]. – URL: http://docs.cntd.ru/document/436761004. (дата обращения 12.12.2020)
- Миннимухаметова А. А. Особенности геодезических измерений спутниковыми методами / А. А. Миннимухаметова, В. Ю. Матросов // Международный академический вестник. – 2015. – № 6 (12). – С. 60-61.
- Катасонов М. В. Принципы выбора мест расположения спутниковых базовых станций / М. В. Катасонов // Молодежь и научно-технический прогресс в дорожной отрасли юга России : материалы IX Международной научно-технической конференции студентов, аспирантов и молодых ученых. 20-22 мая 2015 г., Волгоград / Министерство образования и науки Российской федерации; Волгоградский государственный архитектурностроительный университет. – Волгоград, 2015. – С. 187-191.
- Батищева Е. Н. Исследование точности спутниковых наблюдений локальной геодезической сети / Е. Н. Батищева, Д. Ю. Феклистов, Д. И. Парпура и др. // Науки о земле. – 2015. – № 4. – С. 97-108.
- Кафтан В. И. Геодезические спутниковые измерения и их обработка: учебное пособие для бакалавров по направлению 120700 «Землеустройство и кадастр» / В. И. Кафтан. – Московский государственный университет путей сообщений, 2013. – 111 с.
- Закатов И. С. Курс высшей геодезии / И. С. Закатов. – 4-е изд. перераб. и доп. – М.: Недра, 1976. – 511 с.
- Поклад Г. Г. Геодезия: учебное пособие для вузов / Г. Г. Поклад, С. П. Гриднев. – М.: Академический Проект, 2007, – 592 с.
Список литературы на английском языке / References in English
- Genike A. A. Global'naya sputnikovaya sistema opredeleniya mestopolozheniya GPS i yeye primeneniye v geodezii [Global satellite positioning system GPS and its application in geodesy] / A. A. Genike, G. G. Pobedinskij. – M.: Kartgeotsentr. – Geodezizdat, 1999. – 271. p. [in Russian]
- GOST R 51794-2008. Global'nyye navigatsionnyye sputnikovyye sistemy. Sistemy koordinat. Metody preobrazovaniy koordinat opredelyayemykh tochek [Global navigation satellite Coordinate systems. Methods for transforming the coordinates of the determined points]. – Intr. 18 dec. 2008. – M.: Standartinform, 2009. – 62 p. [in Russian]
- Kaftan V. I. Opredeleniye smeshcheniy i deformatsiy po dannym sputnikovykh geodezicheskikh izmereniy [Determination of displacements and deformations according to satellite geodetic measurements] / V. I. Kaftan, P. A. Dokukin // Geodeziya i kartografiya. – 2007. – № 9. – P. 18-21. [in Russian]
- Ob utverzhdenii Poryadka ustanovleniya mestnykh sistem koordinat. Prikaz Ministerstva ekonomicheskogo razvitiya RF № 383 ot 28 iyulya 2017 goda [On the approval of the Procedure for the establishment of local coordinate systems. Order of the Ministry of Economic Development of the Russian Federation No. 383 dated July 28, 2017] [Electronic resource]. – URL: http://docs.cntd.ru/document/436761004. (accessed 12.12.2020) [in Russian]
- Minnimukhametova A. A. Osobennosti geodezicheskikh izmereniy sputnikovymi metodami [Features of geodetic measurements by satellite methods] / A. A. Minnimukhametova, V. Yu. Matrosov // Mezhdunarodnyy akademicheskiy vestnik. – 2015. – № 6 (12). – P. 60-61. [in Russian]
- Katasonov M. V. Printsipy vybora mest raspolozheniya sputni-kovykh bazovykh stantsiy [Principles of choosing the location of satellite base stations] / V. Katasonov // Molodezh' i nauchno-tekhnicheskiy progress v dorozhnoy otrasli yuga Rossii : materialy IX Mezhdunarodnoy nauchno-tekhnicheskoy konferentsii studentov, aspirantov i molodykh uchenykh. 20-22 maya 2015 g., Volgograd / Ministerstvo obrazovaniya i nauki Rossiyskoy federatsii; Volgogradskiy gosudarstvennyy arkhitekturno-stroitel'nyy universitet. – Volgograd, 2015. – P. 187-191. [in Russian]
- Batishcheva E. N. Issledovaniye tochnosti sputnikovykh nablyudeniy lokal'noy geodezicheskoy seti [Study of the accuracy of satellite observations of the local geodetic network] / E. N. Batishcheva, D. Yu. Feklistov, D. I. Parpura et al. // Nauki o zemle. – 2015. – № 4. – P. 97-108. [in Russian]
- Kaftan V. I. Geodezicheskiye sputnikovyye izmereniya i ikh obrabotka : uchebnoye posobiye dlya bakalavrov po napravleniyu 120700 «Zemleustroystvo I kadastr» [Geodetic satellite measurements and their processing] / V. I. Kaftan. – Moskovskiy gosudarstvennyy universitet putey soobshcheniy, 2013. – 111 p. [in Russian]
- Zakatov I. S. Kurs vysshey geodezii [Course of higher geodesy] / I. S. Zakatov. – 4th edition pererab. i dop. – M.: Nedra, 1976. – 511 [in Russian]
- Poklad G. G. Geodeziya: uchebnoye posobiye dlya vuzov [Geodesy] / G. Poklad, S. P. Gridnev. – M.: Akademicheskiy Proyekt, 2007, – 592 p. [in Russian]