СИСТЕМА ОБХОДА ПРЕПЯТСТВИЙ РОБОТА ПОСРЕДСТВОМ УЗ ДАЛЬНОМЕРОВ С ПРИМЕНЕНИЕМ ПРОПОРЦИОНАЛЬНОГО РЕГУЛЯТОРА
Студент; НИ Томский политехнический университет
СИСТЕМА ОБХОДА ПРЕПЯТСТВИЙ РОБОТА ПОСРЕДСТВОМ УЗ ДАЛЬНОМЕРОВ С ПРИМЕНЕНИЕМ ПРОПОРЦИОНАЛЬНОГО РЕГУЛЯТОРА
Аннотация
В данной работе будет описано реализация и отладка робототехнической платформы с системой обхода препятствий посредством УЗ дальномеров с применением пропорционального регулятора.
Ключевые слова: микроконтроллер, пропорциональный регулятор, ультразвуковой датчик, драйвер двигателя.
Chernykh A.A.
Student; Tomsk Polytechnic University
ROBOT OBSTACLE AVOIDANCE SYSTEM BY USING ULTRASONIC RANGEFINDER AND PROPORTIONAL CONTROLLER
Abstract
In this article will be described the implementation and debugging of robotic platform with obstacle avoidance system using ultrasonic rangefinders and a proportional controller.
Keywords: microcontroller, proportional controller, ultrasonic sensor, motor driver.
Введение
В автоматизированных и автоматических системах требуется система для ориентации робота в пространстве. Существуют уже готовые решения, но и у них есть свои недостатки. Поэтому будет реализована своя система с проведением лабораторных испытаний на робототехнической платформе.
Работа УЗ дальномеров с микроконтроллером
Характеристики датчика HC-SR04: измеряемый диапазон 3 см — 500 см, точность 0,3 см, угол обзора < 15 °, напряжение питания 5V.
Ширина обзора одного датчика на расстоянии 4 - 5 метров составляет около двух метров (т.е. угол обзора 30°). Это позволяет охватывать достаточно большую область одним датчиком.
В документации на модуль датчика расстояния HC-SR04 указано, что для запуска измерений на вход Trig надо подать импульс длительностью 10-15 микросекунд. После чего на выходе Echo появится импульс длительностью 150мкс — 25мс. Длительность этого импульса пропорциональна расстоянию до объекта, от которого отразился ультразвуковой сигнал. Для того что бы из длительности сигнала в микросекундах получить расстояние в сантиметрах используется формула:
D = T/58
где T — длительности сигнала в микросекундах, D — расстояние в сантиметрах.
Была собрана схема согласно рисунку 1 и установлена на платформу.
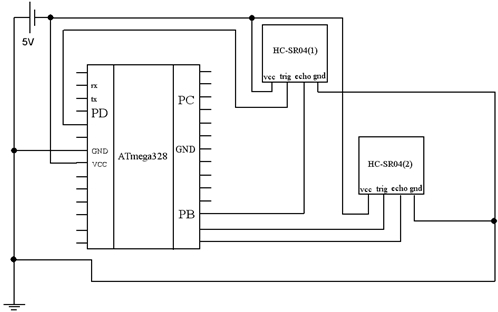
Рис.1 - Электрическая принципиальная схема подключения УЗ датчика
Лабораторные испытания колесной платформы малых габаритов
Для экспериментов была использована колесная платформа (рис.2) с габаритами 250мм х180мм в качестве макета для апробации алгоритма. Была написана программа на языке С++. Произведены натурные испытания.
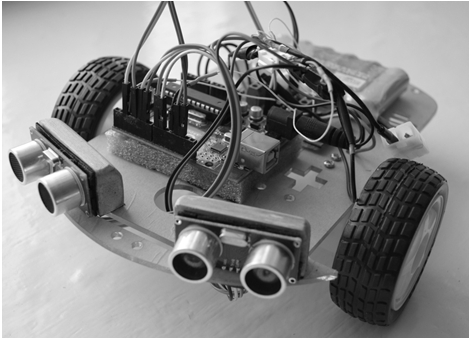
Рис.2 - Платформа для лабораторных испытаний
Проектирование силовой части для тестирования макета платформы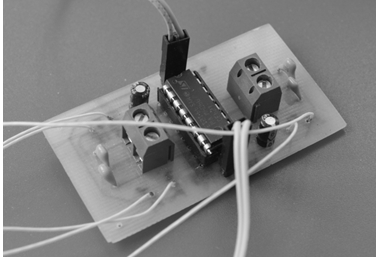
Рис.3 - Силовой модуль на основе драйвера L293D
Для макета платформы была реализована силовая часть, основанная на драйвере двигателя L293D. Управляющий сигнал подается с микроконтроллера на драйвер. К драйверу подключен внешний источник питания. Данный драйвер способен выдерживать ток до 600мА на канал, что достаточно для данного малогабаритного робота. Также драйвер позволяет управлять скоростью двигателей с помощью изменения скважности ШИМ.
Составление печатной платы произведено в программе SLayout-5.
Готовый силовой модуль приведен на рисунке 3.
Принцип работы алгоритма обхода препятствий роботом по УЗ датчикам
Измерение дистанции осуществляется двумя УЗ датчиками. Диапазон работы от 0,03 до 5 метров. Для обхода препятствия используем пропорциональный регулятор. Установлено два датчика по краям платформы на передней части бампера, направленных вперед.
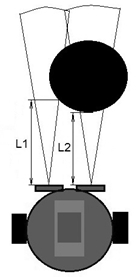
Рис.4 - Схема определения препятствия роботом
Определение препятствия (рис.4):
- Измерение с датчика 1;
- Измерение с датчика 2;
- Разность показаний с датчика 1 и датчика 2;
- Для исключения шумов и ложных возможной неточности измерений задаем предел для получившегося результата, при котором показания считаются в области допустимых значений, не требующих корректировки движения платформы (робота);
- Умножение получившегося результата на коэффициент, в зависимости от конструкции и чувствительности рулевого механизма.
K - коэффициент усиления (в зависимости от конструкции поворотного механизма)
![]()
Соответственно U будет в пределах от -4,97К до 4,97К. Поэтому крайние значения соответствуют крайним положениям рулевого узла (при -4,97К поворот влево при максимально вывернутом рулевом механизме, при 4,97К поворот вправо при максимально вывернутом рулевом механизме). Изменяем скважность сигнала ШИМ, подавая его на сервопривод, пропорционально значению U.
Заключение
Была разработана система обхода препятствий робота посредством УЗ дальномеров с применением пропорционального регулятора. Произведены натурные испытания. В дальнейшем планируется реализация полноценного ПИД регулятора для данной системы.
Литература
- Черных А.А., Тутов И.А. Разработка платформы на основе Arduino UNO для проведения анализа алгоритмов обхода препятствий подвижным объектом. – Сборник трудов международной X научно-практической конференции студентов, аспирантов и молодых ученых, с. 219-220, НИ ТПУ, 2012.
- Datasheet на ультразвуковой датчик HC-SR
- Datasheet на драйвер
- Brian W. Evans. Arduino Programming Notebook.- Publeshed: First Edition August 2007.